bài giảng lý thuyết điều khiển tự động mô hình toán học hệ thống điều khiển liên tục part 1 pps

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 1 doc
Ngày tải lên :
07/08/2014, 23:24
... mô hình toán học 26 September 2006 © H T Hồng - ÐHBK TPHCM Khái niệm mô hình toán học Hệ thống điều khiển thực tế đa dạng có chất vật lý khác Cần có sở chung để phân tích, thiết kế hệ thống điều ... Chương MÔ HÌNH TOÁN HỌC HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC 26 September 2006 © H T Hồng - ÐHBK TPHCM Nội dung chương Khái niệm mô hình toán học Hàm truyền Phép biến đổi Laplace ... biến liên tục c(t) d n c(t ) d n−1c(t ) dc(t ) d m r (t ) d m−1r (t ) dr (t ) + a1 + L + an 1 + an c(t ) = b0 a0 + b1 + L + bm 1 + bm r (t ) n n 1 m m 1 dt dt dt dt dt dt n: bậc hệ thống, hệ thống...
- 10
- 807
- 9

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 2 pdf
Ngày tải lên :
07/08/2014, 23:24
... sách Lý thuyết Điều khiển tự động 26 September 2006 © H T Hồng - ÐHBK TPHCM 15 Đònh nghóa hàm truyền Xét hệ thống mô tả phương trình vi phân: r(t) Hệ thống tuyến tính bất biến liên tục c(t) d n−1c(t ... ÐHBK TPHCM 16 Đònh nghóa hàm truyền (tt) Hàm truyền hệ thống: C ( s ) b0 s m + b1s m 1 + L + bm−1s + bm G (s) = = R ( s ) a0 s n + a1s n 1 + L + an−1s + an Đònh nghóa: Hàm truyền hệ thống tỉ số ... thông số hệ thống Do dùng hàm truyền để mô tả hệ thống 26 September 2006 © H T Hồng - ÐHBK TPHCM 17 Hàm truyền phần tử Cách tìm hàm truyền Bước 1: Thành lập phương trình vi phân mô tả quan hệ vào...
- 10
- 706
- 7

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 3 pps
Ngày tải lên :
07/08/2014, 23:24
... Derivative) KI G (s) = K P + + KDs s R1C1 + R2C2 KI = − KP = − R1C2 R1C2 K D = − R2C1 26 September 2006 © H T Hồng - ÐHBK TPHCM 22 Hàm truyền đối tượng thường gặp Hàm truyền động DC − Lư : điện cảm phần ... phản điện động 26 September 2006 − ω : tốc độ động − Mt : moment tải − B : hệ số ma sát − J : moment quán tính © H T Hồng - ÐHBK TPHCM 23 Hàm truyền đối tượng thường gặp (tt) Hàm truyền động DC ... thời gian điện từ động số thời gian điện động © H T Hồng - ÐHBK TPHCM 25 Hàm truyền đối tượng thường gặp (tt) Hàm truyền động DC (tt) (5) (7) suy ra: U ( s ) − ( s ) I (s) = Rư (1 + Tư s ) (5’)...
- 10
- 1.1K
- 15

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 4 docx
Ngày tải lên :
07/08/2014, 23:24
... Hàm truyền hệ thống đơn giản (tt) Hệ thống nối tiếp n Gnt ( s ) = ∏ Gi ( s ) i =1 26 September 2006 © H T Hồng - ÐHBK TPHCM 35 Đại số sơ đồ khối Hàm truyền hệ thống đơn giản (tt) Hệ thống song ... T Hồng - ÐHBK TPHCM 33 Đại số sơ đồ khối Sơ đồ khối Sơ đồ khối hệ thống hình vẽ mô tả chức phần tử tác động qua lại phần tử hệ thống Sơ đồ khối có thành phần Khối chức năng: tín hiệu hàm truyền ... song song n Gss ( s ) = ∑ Gi ( s ) i =1 26 September 2006 © H T Hồng - ÐHBK TPHCM 36 Đại số sơ đồ khối Hàm truyền hệ thống đơn giản (tt) Hệ thống hồi tiếp âm Hệ thống hồi tiếp âm đơn vò G(s) Gk (...
- 10
- 780
- 8

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 5 potx
Ngày tải lên :
07/08/2014, 23:24
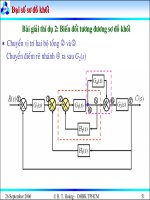
... đồ khối Thí dụ Tính hàm truyền tương đương hệ thống có sơ đồ khối sau: 26 September 2006 © H T Hồng - ÐHBK TPHCM 47 Đại số sơ đồ khối Bài giải thí dụ 1: Biến đổi tương đương sơ đồ khối Chuyển ... TPHCM 48 Đại số sơ đồ khối Bài giải thí dụ 1: Biến đổi tương đương sơ đồ khối GB(s)=[G1(s) // hàm truyền đơn vò ] , GC (s)= vòng hồi tiếp[G2(s),GA(s)]: GB ( s ) = + G1 ( s ) GC ( s ) = G2 ( s ... G2 ( s ).GA ( s ) + G2 ( s ).[G3 ( s ) − G4 ( s )] Hàm truyền tương đương hệ thống: Gtd ( s ) = GB ( s ).GC ( s ) [1 + G1 ( s )].G2 ( s ) Gtd ( s ) = + G2 ( s ).[G3 ( s ) − G4 ( s )] 26 September...
- 10
- 1K
- 8
Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 6 pps
Ngày tải lên :
07/08/2014, 23:24
... khối Bài giải thí dụ 2: Biến đổi tương đương sơ đồ khối Hàm truyền tương đương hệ thống: G2G3 + G3 H1 G1 G1GE + G2 H + G2G3 H + G3 H1H * Gtd = = G2G3 + G3 H1 + G1GE + G 1 + G2 H + G2G3 H + G3 H1H ... H + G3 H1H G1G2G3 + G1G3 H1 ⇒ G= + G2 H + G2G3 H + G3 H1H + G1G2G3 + G1G3 H1 26 September 2006 © H T Hồng - ÐHBK TPHCM 56 Đại số sơ đồ khối Thí dụ Tính hàm truyền tương đương hệ thống có sơ đồ ... số sơ đồ khối Bài giải thí dụ 2: Biến đổi tương đương sơ đồ khối Tính toán cụ thể: H1 * GA = G2 G2 * GB = + G2 H H1 G2 + H1 * GC = + GA = + = G2 G2 G2 G2 + H1 G G + G3 H1 G3 = *...
- 10
- 624
- 8

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 7 pot
Ngày tải lên :
07/08/2014, 23:24
... − ( L1 + L2 + L3 + L4 ) + L1L2 Các đònh thức con: 1 = ∆2 = ∆ = − L1 Hàm truyền tương đương hệ thống: Gtd = ( P 1 + P2 ∆ + P3∆ ) ∆ Gtd = G1G2G3G4G5 + G1G6G4G5 + G1G2G7 (1 + G4 H1 ) + G4 H1 + ... + L + L ) Các đònh thức con: 1 = ∆2 = Hàm truyền tương đương hệ thống: Gtd = ( P 1 + P2 ∆ ) ∆ G1G2G3 + G1G3 H1 Gtd = + G2 H + G2G3 H + G1G2G3 + G3 H1H + G1G3 H1 26 September 2006 © H T Hồng ... Sơ đồ dòng tín hiệu Thí dụ (tt) Đường tiến: Vòng kín: L1 = −G2 H P = G1G2G3 L2 = −G2G3 H L3 = −G1G2G3 L4 = −G3 H1H L5 = −G1G3 H1 P2 = G1H1G3 26 September 2006 © H T Hồng - ÐHBK TPHCM 67 Sơ đồ...
- 10
- 517
- 4

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 8 potx
Ngày tải lên :
07/08/2014, 23:24
... bậc n mô tả hệ thống thành hệ gồm n phương trình vi phân bậc nhất, (hệ phương trình trạng thái) & x(t ) = Ax(t ) + Br (t ) c(t ) = Cx(t ) a 11 a12 K a1n a a22 K a2 n A = 21 M ... 1 B = Lư 0 © H T Hồng - ÐHBK TPHCM C = [0 1] 79 Cách thành lập PTTT từ PTVP Trường hợp 1: Vế phải PTVP không chứa đạo hàm tín hiệu vào Hệ thống mô tả PTVP dc(t ) d nc(t ) d n−1c(t ... a2 n A = 21 M M M an1 an K ann b1 b B = 2 M bn (*) C = [c1 c K c n ] Chú ý: Tùy theo cách đặt biến trạng thái mà hệ thống mô tả nhiều phương trình trạng thái...
- 10
- 1.2K
- 13

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 9 pps
Ngày tải lên :
07/08/2014, 23:24
... pha Xét hệ thống mô tả phương trình vi phân dc(t ) d nc(t ) d n−1c(t ) + a1 + L + an 1 + anc(t ) = a0 n n 1 dt dt dt dr (t ) d m r (t ) d m−1r (t ) + b1 + L + bm 1 + bm r (t ) b0 m m 1 dt dt ... x1 (t ) a1 d n 1 x1 (t ) an 1 dx1 (t ) an + +L+ + x1 ( k ) = r ( k ) n n 1 a0 dt a0 dt a0 dt Biến thứ i (i=2 n) đặt đạo hàm biến i 1 & x2 (t ) = x1 (t ) & x3 (t ) = x2 (t ) M & xn (t ) = xn 1 ... Viết PTTT mô tả hệ thống có quan hệ vào cho PTVP sau: && & & 2&&&(t ) + 5c (t ) + 6c(t ) + 10 c(t ) = 10 r (t ) + 20r (t ) c Đặt biến trạng thái: x1 (t ) = c(t ) & x2 (t ) = x1 (t ) − β1r (t...
- 10
- 710
- 12

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 10 ppt
Ngày tải lên :
07/08/2014, 23:24
... Φ (t ) = L 1[ Φ ( s )] ma trận độ Φ ( s ) = ( sI − A) 1 Chứng minh: xem Lý thuyết Điều khiển tự động Đáp ứng hệ thống? c(t ) = Cx(t ) Thí dụ: xem TD 2 .15 , Lý thuyết Điều khiển tự động 26 September ... Thí dụ (tt) s 1 1 0 ( sI − A ) = s − − − 3 = 2 s + 3 0 ( sI − A ) 1 1 s + 1 s 1 = = s ( s + 3) − 2.( 1) − s 2 s + 3 s + 1 1 [1 0] C ( sI − ... Thí dụ Tính hàm truyền hệ thống mô tả PTTT: & x(t ) = Ax(t ) + Br (t ) c(t ) = Cx(t ) 1 0 A= − − 3 3 B= 1 C = [1 0] Giải: Hàm truyền hệ thống là: C (s) -1 G (s) = = C (sI − A...
- 8
- 427
- 3

Bài giảng lý thuyết điều khiển tự động - Mô tả toán học hệ thống điều khiển rời rạc part 1 potx
Ngày tải lên :
08/08/2014, 00:20
... TPHCM Hệ thống điều khiển dùng máy tính số r(kT) Máy tính số u(kT) D/A uR(t) Đối tượng c(t) cht(kT) A/D Cảm biến “Máy tính số” = thiết bò tính toán dựa sở kỹ thuật vi xử lý (vi xử lý, vi điều khiển, ... lý, vi điều khiển, máy tính PC, DSP,…) Ưu điểm hệ thống điều khiển số: Linh hoạt Dễ dàng áp dụng thuật toán điều khiển phức tạp Máy tính số điều khiển nhiều đối tượng lúc 26 September 2006 © H ... Chương MÔ TẢ TOÁN HỌC HỆ THỐNG ĐIỀU KHIỂN RỜI RẠC 26 September 2006 © H T Hồng - ÐHBK TPHCM Nội dung chương Khái niệm...
- 5
- 456
- 1

Bài giảng lý thuyết điều khiển tự động - Mô tả toán học hệ thống điều khiển rời rạc part 2 doc
Ngày tải lên :
08/08/2014, 00:20
... biến đổi tín hiệu liên tục theo thời gian thành tín hiệu rời rạc theo thời gian * x (t) x(t) Biểu thức toán học mô tả trình lấy mẫu: X * ( s) = T x(t) +∞ ∑ x(kT )e − kTs k =0 Đònh lý Shannon f = ... TPHCM Khâu giữ liệu Khâu giữ liệu khâu chuyển tín hiệu rời rạc theo thời gian thành tín hiệu liên tục theo thời gian Khâu giữ bậc (ZOH): giữ tín hiệu số thời gian hai lần lấy mẫu x*(t) ZOH xR ... Convergence – ROC) ROC tập hợp tất giá trò z cho X(z) hữu hạn 26 September 2006 © H T Hồng - ÐHBK TPHCM 10 ...
- 5
- 394
- 1

Bài giảng lý thuyết điều khiển tự động - Mô tả toán học hệ thống điều khiển rời rạc part 3 pdf
Ngày tải lên :
08/08/2014, 00:20
... x(k )}= X (a −1z ) Đạo hàm miền Z: dX ( z ) Z {kx(k )} = − z dz Đònh lý giá trò đầu: x(0) = lim X ( z ) Đònh lý giá trò cuối: x(∞) = lim (1 − z 1 ) X ( z ) 26 September 2006 z →∞ z 1 © H T Hồng ... TPHCM 12 Biến đổi Z hàm Hàm dirac: δ(k) k = k ≠ 1 δ (k ) = 0 k Z {δ (k )} = Hàm nấc đơn vò: 1 u (k ) = 0 u(k) k ≥ k < k Z {u (k )} = 26 September 2006 z z 1 © H T Hồng - ÐHBK TPHCM 13 Biến ... (z − 1) 2 Hàm mũ: x(k) e-akT k ≥ x(k ) = 0 k < k Z {x(k )} = 26 September 2006 z z − e −aT © H T Hồng - ÐHBK TPHCM 14 Hàm truyền hệ rời rạc 26 September 2006 © H T Hồng - ÐHBK TPHCM 15 ...
- 5
- 388
- 2

Bài giảng lý thuyết điều khiển tự động - Mô tả toán học hệ thống điều khiển rời rạc part 4 doc
Ngày tải lên :
08/08/2014, 00:20
... truyền hệ rời rạc: C ( z ) b0 z m + b1 z m 1 + + bm 1 z + bm G( z) = = R ( z ) a0 z n + a1 z n 1 + + an 1 z + an Hàm truyền biến đổi tương đương dạng: C ( z ) z − ( n−m ) [b0 + b1 z 1 + + bm 1 ... ( z) z 1 (2 + z −2 ) ⇔ G( z) = = R( z ) + z 1 − z −2 + z −3 26 September 2006 © H T Hồng - ÐHBK TPHCM 18 Tính hàm truyền hệ rời rạc từ sơ đồ khối Cấu hình thường gặp hệ thống điều khiển rời ... Giải: G ( z ) = (1 − z )Z = (1 − z )Z s s ( s + 2) 1 z (1 − e −2×0.5 ) = (1 − z 1 ) ( z − 1) ( z − e −2×0.5 ) ⇒ G( z) = 26 September 2006 0.948 z − 0.368 a z (1 − e − aT ) Z...
- 5
- 436
- 2

Bài giảng lý thuyết điều khiển tự động - Mô tả toán học hệ thống điều khiển rời rạc part 5 pps
Ngày tải lên :
08/08/2014, 00:20
... ) = (1 − z 1 )Z G (s) = s ( s + 3) 3e − s 1 = (1 − z )Z H (s) = ( s + 1) s ( s + 3)( s + 1) z ( Az + B) 1 − = 3 (1 − z ) z ( z − 1) ( z − e −3×0.5 )( z − e 1 0.5 ) (1 − e ... hệ rời rạc từ sơ đồ khối Thí dụ 3e − s G (s) = ( s + 3) G ( s) 1 • G ( z ) = (1 − z )Z s 3e − s = (1 − z 1 )Z s ( s + 3) z (1 − e −3×0.5 ) = (1 − z 1 ) z −2 ( z − 1) ( ... − 3 (1 − e −0.5 ) A= = 0.0673 z ( Az + B) 3 (1 − 3) = Z s ( s −3×0+ a)( s + b) ( z − 1) ( z − e −aT )( z − e −bT ) 3e −3×0.5 (1 − e −0.5 ) − e −0.5 (1 − e ) −aT B= b (1 − e = 0.− a (1 −...
- 5
- 474
- 2

Bài giảng lý thuyết điều khiển tự động - Mô tả toán học hệ thống điều khiển rời rạc part 6 pot
Ngày tải lên :
08/08/2014, 00:20
... + 1) = (1 − z 1 )Z = 5 (1 − z 1 ) z 1 s 2( z − 1) 3 0 .1( z + 1) ⇒ G( z) = z ( z − 1) 1 G ( s) H ( s) • GH ( z ) = (1 − z )Z s G ( s) 1 = 0 .1( 1 − z )Z s 0. 01( ... dụ Hàm truyền kín hệ thống: 10 z − 0 .1( z + 1) z . z ( z − 1) GC ( z )G ( z ) Gk ( z ) = = + GC ( z )GH ( z ) 10 z − 0. 01( z + 1) 1+ . z ( z − 1) z ⇒ z ... z ⇒ z + 0.8 z − 0.2 Gk ( z ) = z − z + 1. 1z + 0.08 z − 0.02 ( z ) = 10 − z 1 GC 0 .1( z + 1) G( z) = z ( z − 1) 0. 01( z + 1) GH ( z ) = z ( z − 1) 26 September 2006 © H T Hồng - ÐHBK TPHCM...
- 5
- 402
- 2

Bài giảng lý thuyết điều khiển tự động - Mô tả toán học hệ thống điều khiển rời rạc part 7 pdf
Ngày tải lên :
08/08/2014, 00:20
... thứ i 1 chu kỳ lấy mẫu trừ lượng tỉ lệ với tính hiệu vào 26 September 2006 x1 (k ) = c(k ) x2 (k ) = x1 (k + 1) − β1r (k ) x3 (k ) = x2 (k + 1) − β r (k ) M xn (k ) = xn 1 (k + 1) − β n−1r (k ... có chứa sai phân tín hiệu vào a0c(k + n) + a1c(k + n − 1) + + an−1c(k + 1) + an c(k ) = b0 r (k + n − 1) + b1r (k + n − 2) + + bn−2 r ( k + 1) + bn−1r ( k ) Đặt biến trạng thái theo qui tắc: ... Biến thứ i (i=2 n) đặt cách làm sớm biến thứ i 1 chu kỳ lấy mẫu x1 (k ) = c(k ) x2 (k ) = x1 (k + 1) x3 (k ) = x2 (k + 1) M xn (k ) = xn 1 (k + 1) 26 September 2006 © H T Hồng - ÐHBK TPHCM 32...
- 5
- 294
- 2

Bài giảng lý thuyết điều khiển tự động - Mô tả toán học hệ thống điều khiển rời rạc part 8 potx
Ngày tải lên :
08/08/2014, 00:20
... PTTT từ PTSP Trường hợp (tt) Các hệ số β vector Bd xác đònh sau: b0 1 = a0 b1 − a1 1 β2 = a0 b2 − a1β − a2 1 β3 = a0 M bn 1 − a1β n 1 − a2 β n−2 − K − an 1 1 βn = a0 26 September 2006 © H T ... a1 an 1 an x1 ( k + n) + x1 ( k + n − 1) + L + x1 ( k + 1) + x1 ( k ) = r ( k ) a0 a0 a0 Biến thứ i (i=2 n) đặt cách làm sớm biến thứ i 1 chu kỳ lấy mẫu: x (k ) = x (k + 1) x3 (k ) = x2 (k + 1) ... tọa độ pha Xét hệ rời rạc mô tả phương trình sai phân a0c ( k + n) + a1c ( k + n − 1) + + an−1c ( k + 1) + an c ( k ) = b0 r ( k + m) + b1r ( k + m − 1) + + bm−1r ( k + 1) + bm r ( k ) Đặt biến...
- 5
- 342
- 2

Bài giảng lý thuyết điều khiển tự động - Mô tả toán học hệ thống điều khiển rời rạc part 9 potx
Ngày tải lên :
08/08/2014, 00:20
... 2006 Φ ( s ) = (sI − A) -1 © H T Hồng - ÐHBK TPHCM 43 Thành lập PTTT hệ rời rạc từ PTTT hệ liên tục Bước 3: Rời rạc hóa PTTT mô tả hệ liên tục (hở): e(kT) ZOH G(s) x[(k + 1) T ] = Ad x(kT ) + Bd ... September 2006 b1 a0 0 Bd = 0 1 b0 = [1. 5 0.5] a0 © H T Hồng - ÐHBK TPHCM 42 Thành lập PTTT hệ rời rạc từ PTTT hệ liên tục Thành lập PTTT mô tả hệ rời rạc có sơ đồ khối: r(t) + ... lập PTTT hệ rời rạc từ PTTT hệ liên tục Thành lập PTTT mô tả hệ rời rạc có sơ đồ khối: r(t) + e(t) − T e(kT) ZOH eR(t) x2 x1 K s+a s c(t) Với a = 2, T = 0.5, K = 10 26 September 2006 © H T Hồng...
- 5
- 298
- 2

Bài giảng lý thuyết điều khiển tự động - Mô tả toán học hệ thống điều khiển rời rạc part 10 pptx
Ngày tải lên :
08/08/2014, 00:20
... lập PTTT hệ rời rạc từ PTTT hệ liên tục Bước 3: Rời rạc hóa PTTT hệ liên tục x[(k + 1) T ] = Ad x(kT ) + Bd eR (kT ) c(kT ) = Cd x(kT ) (1 − e −2t ) (1 − e −2×0.5 ) 1 0. 316 = = ... PTTT hệ rời rạc từ PTTT hệ liên tục Bước 2: Tính ma trận độ ⇒ 1 1 s − 1 -1 Φ ( s ) = (sI − A) = s − 0 − = 0 s + 1 s + 1 ... ) 1 0. 316 0.092 0.080 0. 316 với [ Ad − Bd Cd ] = − 0. 316 [10 0] = − 3 .16 0 0.368 0 0.368 Vậy phương trình trạng thái hệ rời rạc cần tìm là: x1 (k + 1) 0.080 0. 316 ...
- 5
- 475
- 2
- bài tập lý thuyết điều khiển tự động
- bai giang li thuyet dieu khien tu dong chuong 2
- bài giảng lí thuyết điều khiển tự động
- mô tả toán học hệ thống điều khiển
- mô tả toán học hệ thống điều khiển liên tục
- bài giảng lý thuyết mạch điện tử
- bài giảng lý thuyết điều khiển tuyến tính
- bài giảng lý thuyết trường điện từ
- bài tập mô tả toán học hệ thống
- bài giảng lý thuyết trường điện từ pdf
- bài giảng lý thuyết điều khiển tự động mô hình toán học hệ thống điều khiển liên tục part 2 pps
- bài giảng lý thuyết điều khiển tự động mô hình toán học hệ thống điều khiển liên tục part 3 pps
- bài giảng lý thuyết điều khiển tự động thiết kế hệ thống điều khiển liên tục part 6 ppt
- bài giảng lý thuyết điều khiển nâng cao
- thiết kế tiến trình dạy học các bài trong chương cảm ứng điện từ theo mô hình dạy học điều tra
Tìm thêm:
- hệ việt nam nhật bản và sức hấp dẫn của tiếng nhật tại việt nam
- xác định các mục tiêu của chương trình
- xác định các nguyên tắc biên soạn
- khảo sát các chuẩn giảng dạy tiếng nhật từ góc độ lí thuyết và thực tiễn
- khảo sát chương trình đào tạo của các đơn vị đào tạo tại nhật bản
- khảo sát chương trình đào tạo gắn với các giáo trình cụ thể
- xác định thời lượng học về mặt lí thuyết và thực tế
- tiến hành xây dựng chương trình đào tạo dành cho đối tượng không chuyên ngữ tại việt nam
- điều tra đối với đối tượng giảng viên và đối tượng quản lí
- điều tra với đối tượng sinh viên học tiếng nhật không chuyên ngữ1
- khảo sát thực tế giảng dạy tiếng nhật không chuyên ngữ tại việt nam
- khảo sát các chương trình đào tạo theo những bộ giáo trình tiêu biểu
- nội dung cụ thể cho từng kĩ năng ở từng cấp độ
- xác định mức độ đáp ứng về văn hoá và chuyên môn trong ct
- phát huy những thành tựu công nghệ mới nhất được áp dụng vào công tác dạy và học ngoại ngữ
- mở máy động cơ lồng sóc
- mở máy động cơ rôto dây quấn
- các đặc tính của động cơ điện không đồng bộ
- hệ số công suất cosp fi p2
- đặc tuyến hiệu suất h fi p2