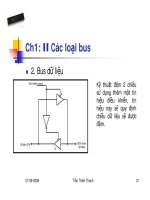
tín hiệu điều khiển

KIẾN TRÚC BỘ XỬ LÝ PPT
CPU đưa địa chỉ của lệnh cần nhận từ bộ đếm chương trình PC ra bus địa chỉ CPU phát tín hiệu điều khiển đọc bộ nhớ Lệnh từ bộ nhớ được đặt lên bus dữ liệu và được CPU copy vào thanh ghi lệnh IR CPU tăng nội dung PC để trỏ sang lệnh
- 28

CHƯƠNG 7: CDROOM PPSX
của đĩa ( bề mặt dán giấy ) , lớp hoá học này có tính chất phản xạ ánh sáng như lớp bạc z Đĩa CD đã có tín hiệu thì tín hiệu được ghi lên đĩa thành các đường Track hình xoáy chôn ốc, tín hiệu ghi là các điểm hoá chất bị đốt cháy mất khả năng phản xạ, xen kẽ với các điểm có khả năng phản xạ .
- 7

GIÁO TRÌNH TIN HỌC ĐẠI CƯƠNG - CHƯƠNG 7 - CD ROM PPSX
Đĩa quay và khi tia lazer chiếu qua điểm bị cháy sẽ mất tia phản xạ => cho ta tín hiệu 0, qua điểm bình thường có tia phản xạ cho ta tín hiệu 1 z Tín hiệu khi đọc nếu ngược với khi ghi thì chỉ việc cho qua cổng đảo tín hiệu sẽ được đảo lại .
- 7

HỆ THỐNG ĐIỀU KHIỂN THIẾT BỊ TỪ XA VÀ TỰ ĐỘNG QUAY SỐ BÁO ĐỘNG THÔNG QUA MẠNG ĐIỆN THOẠI, CHƯƠNG 13 PPT
GIẢI THÍCH Muốn biết trạng thái thiết bị mở hay tắt thì ta phải so sánh tín hiệu điều khiển từ vi điều khiển với tín hiệu từ công tắc bên ngoài.. Vì trạng thái thiết bị phụ thuộc vào 2 t[r]
- 8

HỆ THỐNG CHIẾU SÁNG THÔNG MINH
• Sử dụng mạch dao động ngoài từ 0 đến 8 Mhz với Atmega8L và từ 0 đến 16 Mhz với Atmega8. Vi điều khiển AVR do hãng Atmel ( Hoa Kì ) sản xuất được gới thiệu lần đầu năm 1996. AVR có rất nhiều dòng khác nhau bao gồm dòng Tiny AVR ( như AT tiny 13, AT tiny 22…) có kích thước bộ nhớ nhỏ, ít bộ phận ngoại vi, rồi đến dòng AVR ( chẳn hạn AT90S8535, AT90S8515,…) có kích thước bộ nhớ vào loại trung bình và mạnh hơn là dòng Mega ( như ATmega32, ATmega128, …) với bộ nhớ có kích thước vài Kbyte đến vài trăm Kb cùng với các bộ ngoại vi đa dạng được tích hợp trên chip, cũng có dòng tích hợp cả bộ LCD trên chip ( dòng LCD AVR ). Tốc độ của dòng Mega cũng cao hơn so với các dòng khác. Sự khác nhau cơ bản giữa các dòng chính là cấu trúc ngoại vi, còn nhân thì vẫn như nhau.
- 88

BÀI THẢO LUẬN KỸ THUẬT VI XỬ LÝ ' Ổ ĐĨA QUANG '
+ Mạch tạo áp điều khiển : Tạo điện áp điều khiển để điều khiển mắt đọc hướng tia lazer đọc đúng đường track và hội tụ đúng trên bề mặt đĩa, ngoài ra mạch điều khiển còn điều khiển tốc độ quay của đĩa .
- 12

ĐỒ ÁN THIẾT KẾ BỘ ỔN ÁP XOAY CHIỀU
Khi điện áp lưới thay đổi kéo theo điện áp ra cũng thay đổi, biến áp tín hiệu sẽ cấp tín hiệu cho mạch điều khiển để điều khiển cho động cơ secvô kéo chổi than tới vị trí vòng dây tương [r]
- 41

BAI2 NGUYEN TAC DIEU KHIEN
RƠLE LÀ THIẾT BỊ ĐIỆN TỰ ĐỘNG CÓ TÍN HIỆU RA THAY ĐỔI THEO CẤP KHI TÍN HIỆU VÀO ĐẠT GIÁ TRỊ ỨNG DỤNG ĐÓNG CẮT MẠCH ĐIỀU KHIỂN, MẠCH BẢO VỆ; ĐIỀU KHIỂN MẠCH ĐỘNG LỰC RƠLE CÓ NHIỀU L[r]
- 36

LUẬN ÁN TIẾN SĨ: NGHIÊN CỨU PHÁT TRIỂN LÝ THUYẾT HỆ ĐIỀU KHIỂN NHIỀU TẦNG TRONG ĐIỀU KHIỂN QUÁ TRÌNH NHIỆT TRÊN CƠ SỞ CHỈ SỐ DAO ĐỘNG MỀM (TT)
_HÌNH 1.3 SƠ ĐỒ KHỐI HỆ ĐIỀU KHIỂN TẦNG THEO NGUYỄN VĂN MẠNH _ Trong đó: z là tín hiệu giá trị đặt; u là tín hiệu điều khiển của bộ điều khiển vòng trong cùng; d_1_, d_2_, ..., d_n_ là c[r]
- 24

Thiết kế và chế tạo hệ thống điều khiển tín hiệu giao thông cho ngã tư lập trình bằng vi điều khiển
Thiết kế và chế tạo hệ thống điều khiển tín hiệu giao thông cho ngã tư lập trình bằng vi điều khiển
- 48

CHƯƠNG 2 - MÁY TÍNH TRONG HỆ THỐNG VI XỬ LÝ PPSX
1.2. Máy tính con Máy tính con ( minicomputer ) l μ một dạng thu nhỏ về kích th − ớc cũng nh − về tính năng của máy tính lớn. Nó ra đời nhằm thoả mãn các nhu cầu sử dụng máy tính cho các ứng dụng vừa phải m μ nếu dùng máy to v μ o đó thì sẽ gây ra lãng phí. Do vậy máy tính con th − ờng l μ m việc với các dữ liệu có độ d μ i từ l μ 32 bit với tốc độ chậm hơn v μ khả năng của bộ nhớ hạn chế hơn. Máy tính con th − ờng dùng cho các tính toán khoa học kỹ thuật, gia công dữ liệu qui mô nhỏ hay để điều khiển quá trình công nghệ. Tiêu biểu cho nhóm n μ y l μ các máy VAX 6360 của Digital Equipment Corporation v μ MV/8000II của Data General.
- 8

THIẾT KẾ VÀ ĐIỀU KHIỂN MÔ HÌNH MÁY CẮT VÀ ĐO CHIỀU DÀI DÙNG VI XỬ LÝ
Có rất nhiều phương pháp điều khiển để đạt được đặc tính mong muốn như hình 3 , đạt độ chính xác cao mà giá thành lại rẻ, như phương pháp PID tương tự, số, điều khiển mờ v.v. Phương pháp PID bằng thực nghiệm của Zeigler và Nichols , đòi hỏi cần có các thiết bị đo chính xác và các điều kiện nghiêm ngặt đưa hệ thống vào chế độâ dao động lúc đó chúng ta mới xác định các thông số của bộ điều khiển, nếu ta biết đối tượng ta là gì thì rất dễ dàng điều khiển. Phương pháp điều khiển mờ ta không cần xác định đối tượng của ta như thế nào, ta chỉ cần dựa vào kinh
- 119

HƯỚNG DẪN SỬ DỤNG MÁY CHIẾU SONY
+ BANKGROUND: Chức năng này dùng để cài đặt mầu nền cho máy + TEST PATTERN: Chức năng này mặc định là OFF + LAMP MORE: Chức năng này dùng để cài đặt cho chế độ đèn chiếu + LENS CONTROL: Chức năng này dùng để cài đặt cho chế độ điều khiển ống kính bật/on hay tắt/off
- 3

CN 12 (3CỘT)
Công dụng của mạch điện tử điều khiển là điều khiển tín hiệu, tự động hóa các máy móc, điều khiển các thiết bị dân dụng, các trò chơi giải trí.... Phân loại như SGK _3.[r]
- 38

GIÁO ÁN CÔNG NGHỆ 12 PHẦN 1: KỸ THUẬT ĐIỆN TỬ DOCX
Công dụng của mạch điện tử điều khiển là điều khiển tín hiệu, tự động hóa các máy móc, điều khiển các thiết bị dân dụng, các trò chơi giải trí.... Phân loại như SGK _3.[r]
- 38

TẠO PAN ĐỘNG CƠ Ô TÔ ĐIỀU KHIỂN BẰNG MÁY TÍNH
— Bài báo này trình bày các nghiên cứu và lập trình ứng dụng về cardgiao tiếp điều khiển các tín hiệu trên động cơ ô tô để hướng tới phục vụ giảng dạy chuyên ngành công nghệ ô tô. Card giao tiếp được lập trình bằng hợp ngữ nối các tín hiệu vàora của hộp ECU (Electronic Control Unit) trên động cơ ô tô thông qua chương trình LabVIEW và được điều khiển bằng máy tính. Từ máy tính có thể điều khiển được khởi động và tắt động cơ, điều khiển được lượng nhiên liệu phun vào động cơ, điều khiển nhiệt độ nước làm mát động cơ và nhiệt độ không khí nạp. Các pan của động cơ ô tô được điều khiển từ máy tính thông qua việc đóng mở các relay tín hiệu phun xăng, tín hiệu cảm biến đánh lửa, tín hiệu cảm biến oxy, tín hiệu số vòng quay động cơ, … . Từ tập hợp các giả lập hư hỏng của động cơ ô tô, học viên có thể phát triển được tư duy, suy nghĩ, nhận xét và phán đoán hư hỏng của ô tô để từ đó nâng cao khả năng của mình, đồng thời đóng góp thêm các kinh nghiệm thực tiễn.
- 12

BÀI GIẢNG ĐIỆN TỬ CÔNG NGHỆ VI MẠCH ĐIỀU KHIỂN POT
- Khi U V quá cao U VR U Đ0 (U Đ0 > U đt của điôt ổn áp Đ 0 ) Đ 0 cho i chạy qua . T 1 và T 2 nhận tín hiệu i Đ 0 , khuếch đại i này cấp cho cuộn dây rơ le K, rơ le tác động mở K 2 , cắt điện tải và đóng K 1 cho đèn
- 8

BÀI GIẢNG GHÉP NỐI MÁY TÍNH
Đôi khi để đồng bộ, khối còn nhận tín hiệu nhịp đồng hồ clock từ bus máy tính Khối đệm thiết bị ngoài - Biến đổi mức tín hiệu, công suất và biến đổi dạng tin Khối điều khiển : Điều khiển[r]
- 115

THIẾT KẾ MẠCH ĐIỀU KHIỂN MÔ HÌNH CÁNH TAY MÁY 5 BẬC TỰ DO DÙNG VI XỬ LÝ 8085, CHƯƠNG 4 DOCX
WR -Write : Ghi đây là tín hiệu điều khiển ghi (tác động mức thấp). Tín hiệu này chỉ thị rằng dữ liệu trên tuyến dữ kiệu được ghi vào một ô nhớ hoặc I/O đã chọn IO / M :Input –Output / Memory. Đây là tín hiệu trạng thái được sử dụng để phân biệt giữa các hoạt độâng IO và bộ nhớù. Khi nó ở mức thấp,nó chỉ thị một hoạt động liên quan đến bộ nhớ. Tín hiệu này được kết hợp với RD và WR để tạo ra các tín hiệu điều khiển I/O và bộ nhớ.
- 7

BÀI GIẢNG ĐIỀU KHIỂN QUÁ TRÌNH 1 POT
(FOPDT – First order plus dead time – khâu quán tính bậc một có thêm thời gian chết), trong đó TP hằng số thời gian của quá trình, P thời gian chết của quá trình. Một trong những ví dụ dễ thấy trong thực tế của thời gian chết là băng tải. Thời gian chết là thời gian mà vật liệu được vận chuyển trên băng tải, nó phụ thuộc vào chiều dài và tốc độ của băng. Thời gian chết gây ra nhiều khó khăn trong việc điều khiển quá trình, nó làm mất tính ổn định của hệ thống, suy giảm đặc tính, gây khó khăn trong việc tính toán và lựa chọn phương pháp điều khiển cũng như các bộ điều khiển. Trong thực tế, các hệ thống đều có thời gian chết, do đó các bộ điều khiển tốt phải có khả năng giải quyết thời gian chết của quá trình mà nó điều khiển.
- 11

VỊ TRÍ HÀM TRUYỀN CỦA MỘT SỐ MẠCH ĐIỀU KHIỂN TỰ ĐỘNG TRUYỀN ĐỘNG THỦY LỰC
Nh vậy, hệ kín có khả năng tự động hiệu chỉnh sai số giữa tín hiệu điều khiển và tín hiệu thực thông qua bộ điều khiển, do vậy hệ kín có độ chính xác và chất lợng điều khiển cao. Trong các hệ điều khiển tự động thủy lực, các phần tử điều khiển nh van, bộ khuếch đại và các cảm biến đóng vai trò quan trọng.
- 14

LUẬN VĂN XÂY DỰNG HỆ THỐNG BĂNG TẢI ĐẾM SẢN PHẨM SỬ DỤNG PLC S7 200
Các biến đầu vào được đóng cắt bằng các công tắc bật tắt thông thường. Công tắc vị trí hay các sensor logic để đặt các giá trị đầu vào, các đầu vào này thường có mức điện áp cao để tăng độ chính xác khi truyền đi xa. Trong PLC có 1 bộ chuyển mức điện áp về mức chuẩn với mức logic 1 là +5V và mức logic 0 là 0V. Khi đó PLC sẽ quét các đầu vào để lấy dữ liệu sau một quá trình xử lý bên trong bằng chương trình phần mềm, sau đó dữ liệu đầu ra dạng số với mức logic tương ứng, qua mạch chuyển đổi để có mức điện áp ra phù hợp với yêu cầu điều khiển.
- 62

THIẾT KẾ HỆ THỐNG BÁO CHÁY VÀ CỨU HỎA TỰ ĐỘNG CẬP NHẬP TRẠNG THÁI CÁC VÙNG TRÊN MÀN HÌNH LCD
b. Cảm biến lửa: Khi lửa cháy thì phát ra ánh sáng hồng ngoại, do đó ta sử dụng các linh kiện phát hiện tia hồng ngoại để phát hiện lửa. Nguyên lý hoạt động là điện trở của các linh kiện thu sóng hồng ngoại tăng, nó chuyển tín hiệu ánh sáng thu được thành tín hiệu điện để báo động. Loại này rất nhạy đối với lửa. Tuy nhiên cũng dễ báo động nhầm nếu ta để cảm biến ngồi trời hoặc gần ánh sáng bóng đèn tròn.
- 34

NGHIÊN CỨU VÀ THIẾT KẾ ROBOT THÁM HIỂM
Vì vậy cần thiết kế một chương trình điều khiển cho vi điều khiển PIC 18F4431 để nhận tín hiệu từ cảm biến và xử lí các tín hiệu điều khiển được gửi xuống từ máy vi tính để vận hành cho [r]
- 104

BÀI GIẢNG KỸ THUẬT ĐIỀU KHIỂN TỰ ĐỘNG: BÀI 5 - TRƯỜNG ĐH CÔNG NGHIỆP TP
TRANG 1 KỸ THUẬT ĐIỀU KHIỂN TỰ ĐỘNG lt.sang@hutech.edu.vn TRANG 2 ▪ Bộ điều khiển nhận tín hiệu vào từ những cơ cấu cảm biến sau khi qua phần xử lý tín hiệu ▪ Bộ điều khiển xuất tín hiệu[r]
- 32

ỨNG DỤNG CỦA ĐIỆN TỬ CÔNG SUẤT TRONG ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ, CHƯƠNG 4 PPT
Chương 4: Khối khuếch đại và tạo xung đầu ra Khối khuyếch đại và tạo xung đầu ra có nhiệm vụ tạo ra xung có đủ độ rộng vừa phải khuyếch đại cho xung có đủ biên độ thỏa mãn yêu cầu đối tượng điều khiển. Đầu vào của khối này là tín hiệu của khâu so sánh đầu ra là xung mở Thyristor.
- 7

BÀI TẬP LỚN MÔN ĐIỀU KHIỂN QUÁ TRÌNH: ĐIỀU KHIỂN MỨC NƯỚC VÀ NHIỆT ĐỘ BÌNH CHỨA LỎNG
Hình 1.6. Một dạng cảm biến đo thường gặp. Thiết bị đo là cơ sở cho điều khiển phản hồi, chức năng của một thiết bị đo là cung cấp một tín hiệu ra tỉ lệ theo một nghĩa nào đó với đại lượng đo. Một thiết bị đo gồm hai thành phần cơ bản là cảm biến (sensor) và chuyển đổi đo (transducer). Cảm biến thực hiện chức năng cảm nhận đại lượng quan tâm của quá trình kỹ thuật và biến đổi thành một tín hiệu. Để thuận tiện trong điều khiển cũng như truyền đi xa và thuận tiện trong việc sử dụng các thiết bị điều khiển, chỉ báo, tín hiệu từ cảm biến được biến đổi thành dạng tín hiệu điện, tín hiệu khí nén… bởi bộ chuyển đổi trước khi truyền về phân tử điều khiển, các tín hiệu chuẩn thường là 1-10V, 0-20mA, 4-20mA, RS-485… Các tham số ở đây có thể là các biến như nhiệt độ, áp suất, lưu lượng, mức, … và một số đại lượng khác.
- 26

ĐỀ TÀI ROBOT HÚT BỤI SỬ DỤNG ARDUINO
Để khắc phục nhược điểm này đồ án đã xây dựng và thiết kế một robot tránh vật cản, tín hiệu từ cảm biến siêu âm được chuyển về cổng điều khiển của vi điều khiển, ở đó tín hiệu được xử lí[r]
- 46
SLIDE CHƯƠNG 1 LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG : Tổng quan về hệ thống điều khiển tự động
Khái niệm về Điều khiển tự động1. Khái niệm• Điều khiển tự động là một quá trình điều khiển các thiết bị tựđộng không có sự can thiệp của con người.• Nó là một quá trình sử dụng các thiết bị với những cách thứcđặc biệt để đưa tín hiệu vào đối tượng điều khiển nhằm tạo ramột tín hiệu đầu ra như mong muốn.
- 27

THIẾT KẾ, CHẾ TẠO MẠCH HIỂN THỊ THANG MÁY
HỆ THỐNG MẠCH ĐIỆN TRONG THANG MÁY - Bộ điều khiển trung tâm là PLC với các cổng vào được kết nối với các cảm biến và tín hiệu của vi điều khiển.. Thực hiện xử lý tín hiệu và xuất tín hi[r]
- 29
Đề kiểm tra - đánh giá môn Công nghệ cuối kỳ 1 năm học 2020-2021.
Mạch điều khiển tín hiệu là mạch điện tử điều khiển sự thay đổi trạng thái của tín hiệu Câu 24.. Mạch lọc của mạch nguồn một chiều tụ nào được sử dụng.[r]
- 12

TIỂU LUẬN ĐIỀU KHIỂN KHÍ NÉN
Thực Hiện: Klong & Namnet 2 Điều Khiển Điện - Khí Nén _1.2.CÁC LOẠI TÍN HIỆU ĐIỀU KHIỂN_ Trong điều khiển khí nén nĩi chúng ta sử dụng hai loại tín hiệu: + Tương tự hình 1.2.a _1.3.ĐIỀU [r]
- 50

TỰ ĐỘNG ĐIỀU KHIỂN THỦY LỰC - CHƯƠNG 4
Sơ đồ khối hệ kín điều khiển tốc độ của xe _ Nh− vậy hệ kín có khả năng tự động hiệu chỉnh sai số giữa tín hiệu điều khiển và tín hiệu thực thông qua bộ điều khiển, do vậy hệ kín có độ c[r]
- 26

CHƯƠNG 1: ĐẠI CƯƠNG VỀ HỆ THỐNG ĐIỀU KHIỂN
TRANG 15 1.1 KHÁI NIỆM ĐIỀU KHIỂN CÁC THÀNH PHẦN CƠ BẢN CỦA HỆ THỐNG ĐIỀU KHIỂN BỘ ĐIỀU KHIỂN ĐỐI TƯỢNG ĐK CẢM BIẾN + -rt et ut yt yhtt CHÚ THÍCH: - RT: TÍN HIỆU ĐẶT, TÍN HIỆU CHUẨN, TÍN[r]
- 43

BỘ PHUN XĂNG ĐIỆN TỬ - EFI PART 14 PPTX
Hình 2.61: Mạch điện tín hiệu phụ tải. 2.1.4.12. Cảm biến nhiệt độ khí ERG ( THG ). Cảm biến này được nắp trong van ERG. Nó nhận biết nhiệt độ khí ERG. Cảm biến này gồm một nhiệt điện trở, và nó giống như nhiệt độ nước làm mát hay khí nạp. Các tín hiệu từ cảm biến này được sử dụng trong hệ thống chuẩn đoán. Khi cảm biến này phát hiện nhiệt độ khí ERG dưới hoạt động trong quá trình hoạt động của hệ thống ERG, ECU động cơ sẽ biết hệ thống có trục trặc và nháy đèn “ CHECK ENGINE ” để báo cho lái xe.
- 6

TÌM HIỂU VÀ MÔ PHỎNG HỆ THỐNG PHANH ABS TRÊN ÔTÔ BẰNG PHẦN MỀM SWISHMAX (KL02342)
_ ĐỐI TƯỢNG ĐIỀU KHIỂN TÍN HIỆU ĐIỀU KHIỂN TÍN HIỆU ĐẦU VÀO _ vvàovaứo _ TÍN HIỆU TÁC ĐỘNG TRANG 19 Khoá luận tốt nghiệp đại học Trường ĐHSP Hà Nội 2 Nguyễn Thị Tuyến - K31C SPKT GVHD: T[r]
- 58
TÌM HIỄU BỘ VI XỬ LÝ PHẦN 5 PPT
BUS ĐIỀU KHIỂN GỒM CÁC ĐƯỜNG TÍN HIỆU KHÁC NHAU , HƯỚNG TRUYỀN TUỲ VÀO LOẠI TÍN HIỆU 06 LOẠI TRUYỀN THÔNG TIÊU BIỂU MÀ BUS ĐIỀU KHIỂN PHẢI XÁC ĐỊNH BẰNG TÍN HIỆU ĐIỆN ĐỌC/GHI TỪ[r]
- 6
Phương pháp truyền phát tín hiệu (signaling) và ngắt từ xa (intertripping)
Truyền phát tín hiệu bảo vệ là phương án dùng một sốrơle để điều khiển những rơle khác từ xa, để bảo vệmỗi bộ phận thì cần những hình thức giao tiếp khácnhau Ngắt từ xa là hình thức giao tiếp phát ra tín hiệu đểđiều khiển CB ngắt từ xa Thông điệp giao tiếp yêu cầu khá đơn giản, lànhững chỉ dẫn đểTruyền phát tín hiệu bảo vệ là phương án dùng một sốrơle để điều khiển những rơle khác từ xa, để bảo vệmỗi bộ phận thì cần những hình thức giao tiếp khácnhau Ngắt từ xa là hình thức giao tiếp phát ra tín hiệu đểđiều khiển CB ngắt từ xa Thông điệp giao tiếp yêu cầu khá đơn giản, lànhững chỉ dẫn để
- 32
Từ khóa: lý thuyết điều khiển tự độngbài tập lý thuyết điều khiển tự độngcơ sở lý thuyết điều khiển tự độngtài liệu cơ sở lý thuyết điều khiển tự độnggiáo trình cơ sở lý thuyết điều khiển tự độngbài giảng cơ sở lý thuyết điều khiển tự độngNghiên cứu sự biến đổi một số cytokin ở bệnh nhân xơ cứng bì hệ thốngGiáo án Sinh học 11 bài 13: Thực hành phát hiện diệp lục và carôtenôitGiáo án Sinh học 11 bài 13: Thực hành phát hiện diệp lục và carôtenôitĐỒ ÁN NGHIÊN CỨU CÔNG NGHỆ KẾT NỐI VÔ TUYẾN CỰ LY XA, CÔNG SUẤT THẤP LPWANNGHIÊN CỨU CÔNG NGHỆ KẾT NỐI VÔ TUYẾN CỰ LY XA, CÔNG SUẤT THẤP LPWAN SLIDEPhối hợp giữa phòng văn hóa và thông tin với phòng giáo dục và đào tạo trong việc tuyên truyền, giáo dục, vận động xây dựng nông thôn mới huyện thanh thủy, tỉnh phú thọPhát hiện xâm nhập dựa trên thuật toán k meansNghiên cứu, xây dựng phần mềm smartscan và ứng dụng trong bảo vệ mạng máy tính chuyên dùngNghiên cứu khả năng đo năng lượng điện bằng hệ thu thập dữ liệu 16 kênh DEWE 5000Sở hữu ruộng đất và kinh tế nông nghiệp châu ôn (lạng sơn) nửa đầu thế kỷ XIXChuong 2 nhận dạng rui roKiểm sát việc giải quyết tố giác, tin báo về tội phạm và kiến nghị khởi tố theo pháp luật tố tụng hình sự Việt Nam từ thực tiễn tỉnh Bình Định (Luận văn thạc sĩ)BT Tieng anh 6 UNIT 2Giáo án Sinh học 11 bài 15: Tiêu hóa ở động vậtchuong 1 tong quan quan tri rui roGiáo án Sinh học 11 bài 14: Thực hành phát hiện hô hấp ở thực vậtGiáo án Sinh học 11 bài 14: Thực hành phát hiện hô hấp ở thực vậtGiáo án Sinh học 11 bài 14: Thực hành phát hiện hô hấp ở thực vậtTrách nhiệm của người sử dụng lao động đối với lao động nữ theo pháp luật lao động Việt Nam từ thực tiễn các khu công nghiệp tại thành phố Hồ Chí Minh (Luận văn thạc sĩ)HIỆU QUẢ CỦA MÔ HÌNH XỬ LÝ BÙN HOẠT TÍNH BẰNG KIỀM