bài giảng hệ thống điều khiển số

Bài giảng hệ thống điều khiển số - Động cơ không đồng bộ 3 pha.pdf
Ngày tải lên :
20/08/2012, 09:57
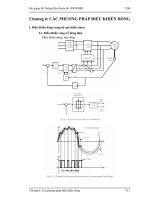
... dụng bộ điều khiển tốc độ động cơ
Hệ thống điều khiển số động cơ không đồng bộ ba pha
Bộ biến tần
(21 tiết)
(42 tiết)
Bài giảng Hệ Thống Điều Khiển Số
(ĐCKĐB)
T©B
Chöông 2: Hệ qui ... góc pha ban đầu θ
o
= 0 và tần số điều rộng xung là 20KHz.
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
2/7/2007 3
CHƯƠNG TRÌNH MÔN HỌC
HỆ THỐNG ĐIỀU KHIỂN SỐ
Chương 1: Bộ nghịch lưu ... 120
0
)
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
2/7/2007 2
GIỚI THIỆU MÔN HỌC
1. Tên môn học: HỆ THỐNG ĐIỀU KHIỂN SỐ
2. Mã số:
3. Phân phối giờ: 33LT + 12BT+Kiểm tra
4. Số tín...
- 19
- 2.4K
- 11

Bài giảng Hệ Thống Điều Khiển Số P1
Ngày tải lên :
29/10/2013, 20:15
... số điều rộng xung (PWM) của bộ nghịch lưu, đánh giá tác
động của sóng hài bậc cao lên dòng điện động cơ. Phương pháp điều
khiển nào có tần số PWM luôn thay đổi?
Bài giảng Hệ Thống Điều ... áp ngõ ra bộ nghịch lưu có dạng PWM sin.
Hình 1.12:
Điều chế biên độ và tần số điện áp.
Bài giảng Hệ Thống Điều Khiển Số
(ĐCKĐB)
T©B
Chöông 1:
Vector không gian và Bộ nghịch ...
βα
ss
u
2
3
u
2
1
+−
Bài giảng Hệ Thống Điều Khiển Số
(ĐCKĐB)
T©B
Chöông 1:
Vector không gian và Bộ nghịch lưu ba pha I.2
Hình 1.2:
Vector không gian điện áp stator trong hệ tọa độ αβ....
- 9
- 473
- 2







Chap2-On dinh cua cac he thong dieu khien so.pdf
Ngày tải lên :
20/08/2012, 10:27
...
Chơng 2
ổn định của hệ thống điều khiển số
Trong chơng này, chúng ta sẽ quan tâm đến một số kỹ thuật cơ bản đợc dùng để
phân tích ổn định các hệ thống điều khiển số.
Nh đà trình bày ở ... các hệ số ở cột đầu tiên cùng dấu do đó hệ ổn định.
Ví dụ 2.7:
Một hệ thống điều khiển số có sơ đồ khối nh trên hình 2.2. Sử dụng tiêu chuẩn Routh-
Hurwitz để xác định giá trị của K để hệ ... chúng ta sẽ tìm hiểu cách xây dựng quỹ tích gốc của các
hệ thống điều khiển rời rạc qua các ví dụ.
Cho hàm truyền của một hệ thống điều khiển kín có dạng nh sau:
( )
( )
1
G z
GH z+
...
- 11
- 961
- 5

Thiết kế hệ thống điều khiển số sử dụng vi điều khiển và máy tính - chương 1
Ngày tải lên :
10/10/2012, 09:53
... gian. Các hệ thống điều khiển này khác với các hệ thống điều
khiển tơng tự trong đó các tín hiệu là liên tục theo thời gian. Một máy tính số có thể đợc sử
dụng nh một bộ điều khiển số. Khái ... các số d, p là các cực và k là các thành phần trực tiếp
Chơng 1
Các hệ thống dữ liệu lấy mẫu và phép biến đổi z
Các hệ thống dữ liệu lấy mẫu hay còn gọi là các hệ thống điều khiển số ... z ngợc
Trong Matlab, hộp công cụ hệ thống điều khiển hỗ trợ việc thiết kế hệ thống điều khiển
thời gian rời rạc. Trong phần này chúng ta sẽ đề cập đến một số lệnh thông dụng để xác định
biến...
- 31
- 1.3K
- 11

Thiết kế hệ thống điều khiển số sử dụng vi điều khiển và máy tính - chương 2
Ngày tải lên :
10/10/2012, 09:53
...
Chơng 2
ổn định của hệ thống điều khiển số
Trong chơng này, chúng ta sẽ quan tâm đến một số kỹ thuật cơ bản đợc dùng để
phân tích ổn định các hệ thống điều khiển số.
Nh đà trình bày ở ... các hệ số ở cột đầu tiên cùng dấu do đó hệ ổn định.
Ví dụ 2.7:
Một hệ thống điều khiển số có sơ đồ khối nh trên hình 2.2. Sử dụng tiêu chuẩn Routh-
Hurwitz để xác định giá trị của K để hệ ... định của hệ
thống. Tơng tự đối với các hệ thống rời rạc, mặt phẳng z đợc dùng để khảo sát ổn định của
hệ thống. Trong phần này chúng ta sẽ xét đến quan hệ tơng đơng giữa mặt phẳng p của
hệ liên...
- 11
- 866
- 7

Thiết kế hệ thống điều khiển số sử dụng vi điều khiển và máy tính - chương 3
Ngày tải lên :
10/10/2012, 09:54
... đợc điều khiển. Sau đó thuật toán điều khiển đợc phát triển để đạt đợc đáp ứng
của đầu ra hệ thống theo mong muốn. Chúng ta có thể sử dụng một số phơng pháp sau
đây để thiết kế các hệ thống điều ... của hệ thống.
( )
HG z đặc trng cho hàm truyền của đối tợng
điều khiển đà đợc số hóa kết hợp với giữ mẫu bậc không.
Hình 3.1: Hệ thống điều khiển thời gian rời rạc.
Hàm truyền của hệ ... điều khiển Dahlin
Bộ điều khiển Dahlin là sự biến cải của bộ điều khiển dead-beat và tạo nên phản ứng
theo hàm mũ trơn hơn phản ứng của bộ điều khiển dead-beat.
Phản ứng yêu cầu của hệ thống...
- 5
- 1K
- 10

Thiết kế hệ thống điều khiển số sử dụng vi điều khiển và máy tính - chương 4
Ngày tải lên :
10/10/2012, 09:54
... thi bằng máy tính số, chúng ta có thể thực thi
đợc các bộ điều khiển đợc sử dụng phổ biến trong công nghiệp nh là bộ điều khiển tỷ lệ-
tích phân-vi phân hay còn gọi là bộ điều khiển PID.
Phơng ... của hệ thống. Để tránh hiện tợng này chúng ta
phải khống chế đầu ra của bộ điều khiển nằm trong phạm vi cho phép từ giá trị nhỏ nhất đến
giá trị lớn nhất.
Vấn đề thứ hai của bộ điều khiển ... sử dụng để thực thi
bộ điều khiển PID sử dụng máy tính số. Các phơng trình này tơng đơng với sơ đồ song
song nh hình 4.3.
Hình 4.3. Thực thi hàm truyền của bộ điều khiển PID theo sơ đồ song...
- 5
- 739
- 8

Thiết kế hệ thống điều khiển số sử dụng vi điều khiển và máy tính - chương 5
Ngày tải lên :
10/10/2012, 09:54
... trong điều khiển số. Hệ thống phần
cứng đợc xây dựng từ vi điều khiển. Bên cạnh đó, một hệ thống vi điều khiển có thể đợc
ghép nối với máy tính, do đó các thông số của bộ điều khiển số có thể ... 6
Hình 5.5: Sơ đồ khối hệ thống điều khiển tốc độ
5.9 Một số đặc điểm chơng trình phần mềm trong điều khiển số
Ta đà biết điều khiển số động cơ điện là điều khiển có thời gian ngắn nhất. ... của hệ thống
điều khiển. Cuối cùng chơng này giới thiệu đặc điểm của ngôn ngữ C là ngôn ngữ tiện lợi để
lập trình cho các vi điều khiển trong điều khiển số.
5.1 Vi điều khiển
Phần cứng điều...
- 6
- 866
- 14

Thiết kế hệ thống điều khiển số sử dụng vi điều khiển và máy tính - chương 6
Ngày tải lên :
10/10/2012, 09:54
... của các hệ thống điều khiển số
ộ ổn định của các hệ thống điều khiển số ổn định của các hệ thống điều khiển số
ộ ổn định của các hệ thống điều khiển số
Giống nh các hệ thống điều khiển tơng ...
IV.
IV.IV.
IV. Thực thi các bộ điều khiển số
Thực thi các bộ điều khiển sốThực thi các bộ điều khiển số
Thực thi các bộ điều khiển số
Các thuật toán điều khiển số ở dạng biến đổi z cần thiết ... nT là các hệ số của chuỗi lũy thừa tại các
các thời điểm lấy mẫu khác nhau.
III.
III.III.
III. Các bộ điều khiển số
Các bộ điều khiển sốCác bộ điều khiển số
Các bộ điều khiển số
Một...
- 14
- 823
- 3

Giới thiệu hệ thống điều khiển số
Ngày tải lên :
12/10/2012, 15:29
... và xuất ra tín hiệu điều khiển.
1.1 ĐẠI CƯƠNG VỀ HỆ THỐNG ĐIỀU KHIỂN RỜI RẠC
Hệ thống điềukhiểnrờirạcl hệ thống điềukhiển trongHệ thống điều khiển rời rạc là hệ thống điều khiển trong
đó tín ... do sai số lượng tử hóa
biên độ, vì vậy thay vì khảo sát hệ thống số ta khảo sát hệ rời rạc.
1.3 HỆ THỐNG ĐIỀU KHIỂN RỜI RẠC
&HỆ THỐNG ĐIỀU KHIỂNSỐ& HỆ THỐNG ĐIỀU KHIỂN SỐ
¾ Thệ thố ó02l ... THIỆU HỆ THỐNG ĐIỀU KHIỂN SỐ
1.1 Đạicương về hệ thống điều khiểnrờirạc
1.2 Hệ thống điều khiểnsố
1.3 Hệ thống điều khiểnrờirạc
và hệ thống điều khiểnsố
...
- 7
- 687
- 6

Hệ thống điều khiển số
Ngày tải lên :
16/11/2012, 10:20
...
Điều khiển gián tiếp từ giá trị đặt - tiếp dòng:
Bài giảng Hệ Thống Điều Khiển Số
(ĐCKĐB)
T
©
B
Chöông 4
: Điều khiển định hướng từ thông ĐCKĐB IV.6
Bài giảng Hệ Thống Điều Khiển ... trên hệ qui
chiếu rotor (rotor ngắn mạch):
Bài giảng Hệ Thống Điều Khiển Số
(ĐCKĐB)
T
©
B
Chöông 4
: Điều khiển định hướng từ thông ĐCKĐB IV.5
Bài giảng Hệ Thống Điều Khiển Số ...
s
r
ψ
r
Bài giảng Hệ Thống Điều Khiển Số
(ĐCKĐB)
T
©
B
Chöông 4
: Điều khiển định hướng từ thông ĐCKĐB IV.9
Bài giảng Hệ Thống Điều Khiển Số
(ĐCKĐB)
T©B
Chöông 5:
Một số phương...
- 77
- 440
- 2

Nghiên cứu hệ thống điều khiển số trên máy công cụ CNC
Ngày tải lên :
05/12/2012, 10:28
... cao 4
II. HỆ THỐNG ĐIỀU KHIỂN THEO CHƯƠNG TRÌNH SỐ 4
1. Nguyên tắc cấu trúc 4
2. Các dạng điều khiển trong điều khiển số 7
a) Điều khiển điểm 7
b) Điều khiển đường thẳng 8
c) Điều khiển theo ... công. Các dạng điều
khiển số đó cũng được phân thành :
_ Điều khiển điểm
_ Điều khiển đoạn thẳng hay điều khiển đường thẳng
_ Điều khiển biên dạng ( điều khiển contour)
a) Điều khiển điểm
...
máy điều khiển số mới gia công được
o HỆ THỐNG ĐIỀU KHIỂN THEO CHƯƠNG TRÌNH SỐ
1. Nguyên tắc cấu trúc
Điều khiển theo chương trình số ( numerical control). Là phương pháp tự động
điều khiển...
- 28
- 4.8K
- 14

Nghiên cứu, thiết kế hệ thống điều khiển số cho động cơ KĐB 3 pha
Ngày tải lên :
26/04/2013, 09:23
... chứa Thread Class để điều khiển hệ
thống
Nghiên cứu, thiết kế hệ thống điều khiển số cho động cơ KĐB 3 pha
4
2.4. X
ét ổn định của hệ thống kín khi chua có bộ điều
khiển …………… 14
2.5. ... Tổng hợp hệ thống dùng bộ điều khiển PID:
3.1.1. Bộ điều khiển PID và việc tìm các thông số cho bộ điều khiển PID:
Bộ điều khiển PID (Proportional Integral Derivative) là bộ điều khiển
kinh ...
PID………………………… …20
3.1.1. Bộ điều khiển PID và việc tìm các thông số cho bộ điều khiển
PID… 20
3.1.2. Chọn thông số cho bộ điều khiển
PID……………………………………22
3.2. Tổng hợp hệ thống dung hồi tiếp trạng...
- 66
- 1.1K
- 0
- hệ thống điều khiển số
- hệ thống điều khiển số điều khiển tiếp dòng
- bài giảng hệ thống điều khiển plc
- tìm hiểu hệ thống điều khiển số
- nghiên cứu hệ thống điều khiển số
- hệ thống điều khiển số ước lượng từ thông
- bài giảng hệ thống điều khiển phân tán
- giáo trình hệ thống điều khiển số
- bài tập hệ thống điều khiển số
Tìm thêm:
- hệ việt nam nhật bản và sức hấp dẫn của tiếng nhật tại việt nam
- xác định các mục tiêu của chương trình
- xác định các nguyên tắc biên soạn
- khảo sát các chuẩn giảng dạy tiếng nhật từ góc độ lí thuyết và thực tiễn
- khảo sát chương trình đào tạo của các đơn vị đào tạo tại nhật bản
- khảo sát chương trình đào tạo gắn với các giáo trình cụ thể
- xác định thời lượng học về mặt lí thuyết và thực tế
- tiến hành xây dựng chương trình đào tạo dành cho đối tượng không chuyên ngữ tại việt nam
- điều tra đối với đối tượng giảng viên và đối tượng quản lí
- điều tra với đối tượng sinh viên học tiếng nhật không chuyên ngữ1
- khảo sát thực tế giảng dạy tiếng nhật không chuyên ngữ tại việt nam
- khảo sát các chương trình đào tạo theo những bộ giáo trình tiêu biểu
- nội dung cụ thể cho từng kĩ năng ở từng cấp độ
- xác định mức độ đáp ứng về văn hoá và chuyên môn trong ct
- phát huy những thành tựu công nghệ mới nhất được áp dụng vào công tác dạy và học ngoại ngữ
- mở máy động cơ lồng sóc
- mở máy động cơ rôto dây quấn
- các đặc tính của động cơ điện không đồng bộ
- hệ số công suất cosp fi p2
- đặc tuyến hiệu suất h fi p2