gai bai tap mon ki thuat dieu khien tu dong

đề cương ôn tập môn kĩ thuật điều khiển thủy khí
... kép được sử dụng để mở và đóng cánh cửa lò nung. Cánh cửa được điều khiển đến vị trí giữa bất kỳ mon muốn. Xy lanh được hãm bằng thuỷ lực ở tất cả các vị trí như vậy a. Vẽ biểu đồ trạng thái của ... Lấy các ví dụ và phân tích điều khiển theo hành trình, theo thời gian, theo vận tốc, phối hợp, tu n tự, tùy chọn Câu 6 : Nêu các đặc điểm các loại cảm biến tiệm cận (Điện dung, điện cảm, quang) ... động? c. Thiết kế hệ thống mạch lực và mạch điều khiển điện khí nén Bài tập 16: Hệ thống cung cấp tấm kim loại cho máy cắt được mô tả quá trình bằng biểu đồ trạng thái như hình vẽ. a. Mô tả quá...
Ngày tải lên: 05/03/2014, 19:29




Tài liệu Bài tập dài - Lý thuyết điều khiển tự động pptx
... trong khâu PID là Kp ,Ki, Kd. Thời gian trễ là 9s *Bước 3 :Trên cửa sổ Command Window dùng 2 lệnh sau: >>pid0=[1.39 0.2 1.56]; >>pid=lsqpid(pid0,' bai_ tap& apos;,[0 500]) Màn ... pid=leastsq('yout_1',pid0,options,[],&apos ;bai_ tap& apos;,tspan); 3.Quá trình tính toán trên máy: a)Sơ lược quá trình tính: -Dùng 2 cửa sổ Command window &Simulink trong Matlab. -Với sơ ki n ban đầu Simulink ... chạy trên MATLAB: >>L=9;T=15;Kp=T/L;n=3; Kp Ki/ s KD.s 1 T.s+1 e - Ls Bài tập dài LTĐKTĐ Hình 8 -Lấy các giá trị Kp ,Ki, Kd đã chỉnh định nhập vào khâu PID sẽ được kết...
Ngày tải lên: 12/12/2013, 18:15

BÀI TẬP LỚN: LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG
... tính tần số logarit mong muốn L m (s) theo các tiêu chuẩn chất lượng đặt ra cho hệ thống Dựa cào các chỉ tiêu chất lượng cho trước ta thực hiện tìm hàm truyền hệ thống mong muốn và dựng đặc ... ─1,538. <0 Kết luận: Hệ thống kín ban đầu không ổn định vì không thỏa mãn các điều ki n ổn định của tiêu chuẩn Hurwitz. b) Khảo sát tính ổn định của hệ thống kín trên matlab: % ... truyền hệ hở sau khi hiệu chỉnh nối tiếp: W h (s)= W hbd (s) 1. Dựng đường đặc tuyến của hệ thống hở ban đầu Hệ thống hở ban đầu có tần số cắt c =38,7(rad/sec),hệ thống...
Ngày tải lên: 08/03/2014, 16:30

Bài tập lớn lý thuyết điều khiển tự động pdf
... DHDI7TH 8 Hệ thống ổn định với các tham số nh- sau : Kp =0,01 ; Ki = 0,008 ; Kd = 0; bé PID 2 cã :Kp=0,01 ; Ki = 0,005 ; Kd = 0,01 b, Khi bá PID lấy W 4 (p) ta có sơ đồ ... initgraph(&gd,&gm,”c:\\borlandc++\\bgi”) ; setlinestyle(0,0,3) ; setbkcolor(0) ; setcolor(4) ; outtextxy(160,30,”PHUONG PHAP SO TUSTIN”) ; outtextxy(150,40,”(He khong on dinh)”) ; outtexexy(20,450,”0”) ; setcolor(5) ; rectangle(2,2,637,477) ... (int)(10*y[k]/1.6),”y(t)”) ; outtextxy(455, 450 – (int)(10*y[k]/1.6),”Tin hieu ra”) ; getch() ; closegraph() ; return(0) ;} 3. Khi có bộ PID và có khâu W 4 (p) : a, khi bỏ khâu W 4 (p) ta có sơ ®å khèi...
Ngày tải lên: 10/03/2014, 21:20

bài tập lớn lí thuyết điều khiển tự động với hệ tham số cho trước
... tính tần số pha V.Tính toán và xây dựng đặc tính tần số biên độ loga mong muốn L mm (ω). Đặc tính tần số biên độ loga mong muốn L mm (ω) của hệ thống điều chỉnh tự động là đặc tính được xây ... môn học “Cơ sở lý thuyết điều khiển tự động” khảo sát và tính toán hệ thống Đ.C.T.Đ liên tục, tuyến tính, Học viện Kỹ thuật Quân sự, Hà Nôi-1997. 3. Giáo trình Phần tử tự động, Học viện Kỹ ... đoạn tần số cao ít ảnh hưởng đến chất lượng của hệ thống, nên trong thực tế tính toán có thể chọn tu ý. Để đơn giản ta chọn đoạn tần số cao có độ nghiêng trùng với độ nghiêng đoạn tần số cao của...
Ngày tải lên: 29/05/2014, 14:06


bao cao chi tiết bai 1 Môn thí nghiệm điều khiển tự động-ĐH Tôn Đức Thắng
Ngày tải lên: 14/10/2014, 22:35

Tổng hợp các bài tập môn lý thuyết điều khiển
... sau: Bài 1-34 Viết phương trình trạng thái cho mạch điện sau: Áp dụng các định luật Kirchoff 1,2 ta có: Trong đó Từ đó ta viết được dạng phương trình chính tắc sau: X(s)...
Ngày tải lên: 05/03/2013, 17:10

Tài liệu Bài giảng: Kỹ thuật điều khiển tự động doc
... E = R + B (Điều khiển kín gồm hai tuyến: Tuyến thuận truyền tín hiệu từ tác động E đến tín hiệu ra C. Các phần tử trên tuyến thuận ký hiệu G (G 1 , G 2 , ) tuyến phản hồi truyền từ tín hiệu ... cần tuyến tính hoá các phương trình phi tuyến trên. Phương pháp như sau. 1.4- Phân loại hệ thống điều khiển. * Việc phân loại hệ thống điều khiển (Controller System) có rất nhiều hình thức tu ... học thì có các hệ thống sau: Hệ thống liên tục Hệ thống gián đoạn Hệ thống tuyến tính Hệ thống phi tuyến Hệ thống tuyến tính hoá * Theo dạng năng lượng tiêu th: Hình 1-16 O Y K X B C G C <=> B G C 1/G C B B B C G <=> GG B C C C <=> R ...
Ngày tải lên: 16/12/2013, 03:15

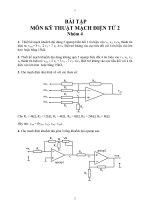
BÀI TẬP MÔN KỸ THUẬT MẠCH ĐIỆN TỬ 2_Nhóm 1 pps
... t 0 ữ 50k. c. Xỏc nh khong giỏ tr VR để IC khuếch đại không bị méo dạng ? Giải thích trên đặc tuyến vào ra v out (v in ) của opamp 2. 5. Tính toán mạch dao động (tính chọn các thông số của...
Ngày tải lên: 02/07/2014, 16:20

BÀI TẬP MÔN KỸ THUẬT MẠCH ĐIỆN TỬ 2_Nhóm 2 ppt
... mạch điện như hình vẽ. Giả thiết n là một số nguyên dương lớn hơn 1, q là một số thực (0 ≤ q ≤ 1) tu thuộc vào vị trí điểm di động của biến trở R 0 . a. Xác định biểu thức tổng quát tính hệ số...
Ngày tải lên: 02/07/2014, 16:20

BÀI TẬP MÔN KỸ THUẬT MẠCH ĐIỆN TỬ 2_Nhóm 3 pptx
... mạch điện như hình vẽ. Giả thiết n là một số nguyên dương lớn hơn 1, q là một số thực (0 ≤ q ≤ 1) tu thuộc vào vị trí điểm di động của biến trở R 0 . a. Xác định biểu thức tổng quát tính hệ số...
Ngày tải lên: 02/07/2014, 16:20




Đề thi môn Cơ sở điều khiển tự động
... điều ki n để sai số ở trạng thái xác lập của một hệ thống điều khiển tự động thỏa mãn điều ki n cho trước thì: a Tìm điều ki n để hệ không ổn định b Chỉ cần tính sai số xác lập và tìm điều ki n ... điều ki n để hệ ổn định d Trước hết phải tìm điều ki n để hệ thống đó ổn định, sau đó tìm điều ki n để sai số ở trạng thái xác lập của nó thỏa mãn yêu cầu đề ra, kết hợp cả hai điều ki n là ... miền nào? a Trong miền Z với điều ki n đầu triệt tiêu b Trong miền Laplace rời rạc với điều ki n đầu tiến tới vô cùng c Trong miền Laplace với điều ki n đầu triệt tiêu d Trong miền thời...
Ngày tải lên: 10/10/2012, 15:28
Bạn có muốn tìm thêm với từ khóa: