Đề cương ôn tập lý thuyết điều khiển tự động hệ cao đẳng

Đề cương ôn tập lý thuyết điều khiển tự động hệ cao đẳng
... hệ b Tìm điều kiện K để hệ thống ổn định Đáp án: a (1.5đ) A( s ) = s + s + s + K + = b (1.5đ) -1
Ngày tải lên: 09/09/2015, 14:33

Đề cương ôn tập lý thuyết điều khiển tự động hệ đại học
... Cho hệ thống điều khiển tự động có sơ đồ: a Phân tích tính ổn định hệ hở b Tìm K để hệ kín ổn định 87 88 Đáp án: a (1đ) hệ hở ổn định b (1đ) -5 < K < 6.5 Câu hỏi: Cho hệ thống điều khiển tự động ... tra tính điều khiển tính quan sát Đáp án: a (2đ) W ( s ) = C ( sI − A) −1 B 123 b (1đ) điều khiển được, quan sát Câu hỏi: Cho sơ đồ khối hệ thống điều khiển...
Ngày tải lên: 09/09/2015, 14:33

Đề cương ôn tập lý thuyết điều khiển tự động hệ đại học
... điều khiển tự động có sơ đồ: 87 a Phân tích tính ổn định hệ hở b Tìm K để hệ kín biên giới ổn định Đáp án: a (1đ) hệ hở biên giới ổn định b (1đ) K = 88 Câu hỏi: Cho hệ thống điều khiển tự động ... Cho hệ thống điều khiển tự động có sơ đồ: 86 IV IV 2 II, IV a Phân tích tính ổn định hệ hở b Tìm K để hệ kín ổn định Đáp án: 2 a (1đ) hệ hở ổn định b (1đ) -5...
Ngày tải lên: 09/09/2015, 14:33

bài tập lý thuyết điều khiển tự động
... Bài 23: Trên đặc tính pha tần số góc pha thay đổi ảnh hưởng đến chế độ điều khiển? Bài 24: Trên đặc tính tần số biên độ logarit trục hoành thường dùng đơn vị đecac? Bài 25: Nếu trục ... biên độ logarit LH(ω) Bài 140: Hãy thành lập hàm truyền mạch điện có sơ đồ nguyên lý sau: Bài 141, 142: Hãy thành lập hàm truyền mạch điện có sơ đồ nguyên lý sau: - 12 - Bài 143, 144, 145: C...
Ngày tải lên: 18/09/2014, 08:59

Bài tập lý thuyết điều khiển tự động sử dụng matlab
... ta sử dụng hiệu chỉnh PID cho hệ thống Vẽ giản đồ Bode điều khiển PID Phân tích ảnh hưởng khâu P, D dựa giản đồ Bode Tính chọn tham số PID theo phương pháp sau: P: chọn Kp cho hệ bắt đầu dao động ... 80.7s σm = 23.3% Bài tập 2: Cho hệ thống hở có hàm truyền đạt Ta có đáp ứng hệ thống chưa thêm khâu hiệu chỉnh: Hình Ta có: Tr = 0.941s Ts = 0.342s σm = 4.15% ess=0.5 1) Người ta s...
Ngày tải lên: 06/06/2015, 09:12

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 1 docx
... phi tuyến chia làm hai loại: Hệ phi tuyến liên tục Hệ phi tuyến rời rạc Nội dung môn học đề cập đến hệ phi tuyến liên tục 26 September 2006 © H T Hồng - ÐHBK TPHCM Tính chất hệ phi tuyến Hệ phi ... phi tuyến Hệ phi tuyến hệ thống quan hệ vào – mô tả phương trình vi phân/sai phân tuyến tính Phần lớn đối tượng tự nhiên mang tính phi tuy...
Ngày tải lên: 08/08/2014, 00:20
Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 2 ppt
... δ (t ) ) & τ τ & 2 2 2 (hệ phi tuyến bậc 3) 26 September 20 06 © H T Hồng - ÐHBK TPHCM 14 Mô tả toán học hệ phi tuyến dùng phương trình trạng thái Hệ phi tuyến liên tục mô tả phương ... ) 2 ( J + ml ) ( J + ml ) ( J + ml ) (hệ phi tuyến bậc 2) 26 September 20 06 © H T Hồng - ÐHBK TPHCM 13 Mô tả hệ phi tuyến dùng phương trình vi phân – T...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 3 pdf
... T Hồng - ÐHBK TPHCM 18 Phương pháp tuyến tính hóa 26 September 2006 © H T Hồng - ÐHBK TPHCM 19 Điểm dừng hệ phi tuyến & x (t ) = f ( x (t ), u (t )) Xét hệ phi tuyến mô tả PTTT phi tuyến: ... trạng thái x gọi điểm dừng hệ phi tuyến hệ trạng thái x với tác động điều khiển u cố đònh, không đổi cho trước hệ nằm nguyên trạng thái Nếu ( x , u ) điểm dừn...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 5 doc
... Điều khiển ổn đònh hóa hệ phi tuyến quanh điểm làm việc tónh r(t) + e(t) PID − ON-OFF u(t) Đối tượng phi tuyến y(t) Chọn ĐK Thuật toán điều khiển ON-OFF: Nếu e(t ) > emax ... September 2006 © H T Hồng - ÐHBK TPHCM 34 Điều khiển ổn đònh hóa hệ phi tuyến quanh điểm làm việc tónh r(t) + e(t) PID u(t) Đối tượng phi tuyến − ON-OFF y(t) Chọn ĐK Thuật toán điều...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 6 docx
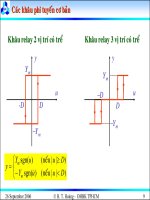
... = = 1− M πM M 26 September 20 06 © H T Hồng - ÐHBK TPHCM 46 Hàm mô tả khâu phi tuyến Khâu khuếch đại bão hòa ch 26 September 20 06 © H T Hồng - ÐHBK TPHCM 47 Hàm mô tả khâu phi tuyến Khâu khuếch ... 4Vm N (M ) = = M πM 26 September 20 06 © H T Hồng - ÐHBK TPHCM 44 Hàm mô tả khâu phi tuyến Khâu relay vò trí 26 September 20 06 © H T Hồng - ÐHBK TPHCM 45 Hàm...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 7 potx
... T Hồng - ÐHBK TPHCM D sin α = M 52 Khảo sát chế độ dao động hòa hệ phi tuyến Xét hệ phi tuyến có sơ đồ sau: r(t)=0 + − e(t) N(M) u(t) G(s) y(t) Điều kiện để hệ thống có dao động là: ... Hồng - ÐHBK TPHCM 54 Trình tự khảo sát chế độ dao động hệ phi tuyến B1: Xác đònh hàm mô tả khâu phi tuyến (nếu khâu phi tuyến khâu bản) B2: Điều kiện...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 9 pot
... Đònh lý: Nếu hệ thống tuyến tính hóa (2) ổn đònh hệ phi tuyến (1) ổn đònh tiệm cận điểm cân xe Nếu hệ thống tuyến tính hóa (2) không ổn đònh hệ phi tuyến (1) không ổn đònh điểm cân xe Nếu hệ thống ... ε , ∀t ≥ © H T Hồng - ÐHBK TPHCM 69 Ổn đònh tiệm cận Lyapunov Cho hệ phi tuyến không kích thích mô tả PTTT: & x = f ( x , u ) u =0 (1) Giả sử hệ thống...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 10 potx
... luận: Hệ thống không ổn đònh (PTĐT không thỏa điều kiện cần) 26 September 2006 © H T Hồng - ÐHBK TPHCM 75 Phương pháp trực tiếp Lyapunov – Đònh lý ổn đònh Đònh lý ổn đònh Lyapunov: Cho hệ phi tuyến ... ml ml l Kết luận: Hệ thống ổn đònh (theo hệ tiêu chuẩn Hurwitz) 26 September 2006 © H T Hồng - ÐHBK TPHCM 74 Phương pháp tuyến tính hóa Lyapunov – Thí dụ (tt...
Ngày tải lên: 08/08/2014, 00:20