thiết lập biểu đồ ngữ cảnh hệ thống

Thiết lập biểu đồ
... bảng Order & Timing Thiết lập hiệu ứng cho biểu đồ Sau kích chọn tên biểu đồ bạn mở bảng Chart Effects để thiết lập hiệu ứng Chọn cách thực hiệu ứng theo th nh phần khác biểu đồ khung Introduce ... Khi muốn chọn Font cho biểu đồ, phải kích chọn biểu đồ Muốn chọn Font, m u cho đối tợng n o biểu đồ, cần kích chọn đối tợng chọn lại Font, m u bình thờng Khi hiệu chỉnh biểu đồ xong, kích v o vị ... hình thiết kế để kết thúc, bảng Datasheet ẩn v m n hình thiết kế trở lại bình thờng Khi muốn tái hiệu chỉnh, kích đúp chuột v o biểu đồ để chuyển sang chế độ hiệu chỉnh Thiết lập hiệu ứng Thiết lập...
Ngày tải lên: 05/10/2013, 11:20


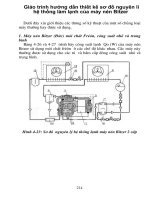
Giáo trình hướng dẫn thiết kế sơ đồ nguyên lí hệ thống làm lạnh của máy nén Bitzer phần 1 pptx
Ngày tải lên: 26/07/2014, 03:21

ĐỀ Báo cáo BÀI TẬP LỚN CIMFMS THIẾT LẬP CÁC CHƯƠNG TRÌNH CHO HỆ THỐNG FMS GỒM
... CTM6-K46 Bài làm I.Bố trí sơ đồ mặt hệ thống FMS sơ đồ luồng thông tin hệ Sơ đồ Rôbốt gắp chi tiết từ Băng tải Phôi Máy CNC Palett Rôbốt Trên băng tải đa vào phay Sơ đồ bố trí điểm mà robot đa ... điểm miệng thùng chứa phôi để tránh va quệt.Tay Robot đợc đa dến vị trí ban đầu tiếp tục chu kỳ Sơ đồ khối thuật toán làm việc tay Robot: Nút bấm NB1 đợc bấm ,chuông kêu đèm sáng Thay đổi tốc độ,...
Ngày tải lên: 08/05/2016, 21:58

Báo cáo BÀI TẬP LỚN CIMFMS THIẾT LẬP CÁC CHƯƠNG TRÌNH CHO HỆ THỐNG FMS GỒM
... CIM - FMS Bài làm I.Bố trí sơ đồ mặt hệ thống FMS sơ đồ luồng thông tin hệ Băng tải Phôi Máy CNC Palett Rôbốt Sơ đồ Rôbốt gắp chi tiết từ Trên băng tải đa vào phay Sơ đồ bố trí điểm mà robot đa ... điểm miệng thùng chứa phôi để tránh va quệt.Tay Robot đợc đa dến vị trí ban đầu tiếp tục chu kỳ Sơ đồ khối thuật toán làm việc tay Robot: Kiểm tra có Bật đèn 3, phôibấm không Nút bấm NB1 ,chuông...
Ngày tải lên: 08/05/2016, 22:01

Báo cáo ĐỀ BÀI TẬP LỚN CIMFMS THIẾT LẬP CÁC CHƯƠNG TRÌNH CHO HỆ THỐNG FMS GỒM
... tập lớn FMS & CIM I.Bố trí sơ đồ mặt hệ thống FMS sơ đồ luồng thông tin hệ Băng tải Phôi Máy CNC Palett Rôbốt Sơ đồ Rôbốt gắp chi tiết từ Trên băng tải đa vào phay Sơ đồ bố trí điểm mà robot đa ... SV: ĐặngVăn Chí- Lớp CTM6-K46 Bài tập lớn FMS & CIM N162X50.F305.4 Lập trình PLC ( dùng ngôn ngữ bậc thang ) để thực nhiệm vụ hệ thống Các bớc thực chơng trình : Thứ tự 10 Tín hiệu vào Bật công ... lớn FMS & CIM I: 1/6 I: 1/5 Công tắc hành trình Barcoder Tín hiệu Output robot Từ thông số ta thiết lập đợc chơng trình PLC nh sau: SV: ĐặngVăn Chí- Lớp CTM6-K46 Bài tập lớn FMS & CIM SV: ĐặngVăn...
Ngày tải lên: 09/05/2016, 17:32

BÀI TẬP LỚN FMS: Thiết lập các chương trình cho hệ thống FMS 2 trạm làm việc
... lớn FMS & CIM - Lập trình PLC ( dùng ngôn ngữ bậc thang ) để thực nhiệm vụ hệ thống Các bớc thực chơng trình : Thứ tự 10 Tín hiệu vào Bật công ... Bài tập lớn FMS & CIM - Lập lu đồ làm việc robot Lu đồ làm việc Robot phục vụ cho máy tiện bao gồm diểm tơng ứng với vị trí mà Robot qua: ... ASRS[7] WRITEO 8,0 // cap xong phoi PMOVE ASRS[6] PMOVE ASRS[1] BRANCH LABEL 4-5 Lập trình NC để gia công chi tiết máy CNC hệ FMS : -Đàm văn Thùy Lớp...
Ngày tải lên: 09/05/2016, 21:37

BÀI TẬP LỚN CIM-FMS THIẾT LẬP CÁC CHƯƠNG TRÌNH CHO HỆ THỐNG FMS
... FMS & CIM Bài làm I.Bố trí sơ đồ mặt hệ thống FMS sơ đồ luồng thông tin hệ Băng tải Phôi Máy CNC Palett Rôbốt Sơ đồ Rôbốt gắp chi tiết từ Trên băng tải đa vào phay Sơ đồ bố trí điểm mà robot đa ... N188X-9.765Y-21.988 N190X-9.605Y-20.488 N192X-9.435Y-18.988 N194X-9.257Y-17.488 Lập trình PLC ( dùng ngôn ngữ bậc thang ) để thực nhiệm vụ hệ thống Các bớc thực chơng trình : Thứ tự Tín hiệu vào Bật công tắc ... chuyển băng tải I: 1/6 Công tắc hành trình Barcoder I: 1/5 Tín hiệu Output robot Từ thông số ta thiết lập đợc chơng trình PLC nh sau: SV: Lê Hồng Sơn- Lớp CTM6-K46 Bài tập lớn FMS & CIM SV: Lê Hồng...
Ngày tải lên: 11/05/2016, 09:24

BÀI TẬP LỚN FMS Đề bài: Thiết lập các chương trình cho hệ thống FMS
... Thanh Tùng CTM6 / K46 Bố trí sơ đồ mặt hệ thống MS sơ đồ luồng thông tin hệ: Băng Tải Phôi Máy phay CNC RôBốt Sơ đồ Rôbốt gắp chi tiết từ băng tải đưa vào phay Sơ đồ bố trí điểm mà rôbốt đa tay ... đáy (để chế độ Trim dòng Yes) Done Nh ta vẽ xong đợc chi tiết giỏ xe bàng phần mềm Mastercam Thiết lập đờng chạy dao để gia công chi tiết giỏ xe: - Chọn đờng chạy dao(quá trình phay) + Toolpaths ... đa vị trí ban đầu tiếp tục chu kỳ Hà nội 11/2005 Bài tập lớn FMS Nguyễn Thanh Tùng CTM6 / K46 Sơ đồ khối thuật toán làm việc tay Rôbốt Nút bấm bấm, chuông kêu, đèn sáng Thay đổi tốc độ tay Robot,...
Ngày tải lên: 11/05/2016, 13:50

BÁO CÁO BÀI TẬP LỚN CIMFMS THIẾT LẬP CÁC CHƯƠNG TRÌNH CHO HỆ THỐNG FMS GỒM
... CTM6-K46 Bài làm I.Bố trí sơ đồ mặt hệ thống FMS sơ đồ luồng thông tin hệ Sơ đồ Rôbốt gắp chi tiết từ Băng tải Phôi Máy CNC Palett Rôbốt Trên băng tải đa vào phay Sơ đồ bố trí điểm mà robot đa ... điểm miệng thùng chứa phôi để tránh va quệt.Tay Robot đợc đa dến vị trí ban đầu tiếp tục chu kỳ Sơ đồ khối thuật toán làm việc tay Robot: Nút bấm NB1 đợc bấm ,chuông kêu đèm sáng Thay đổi tốc độ,...
Ngày tải lên: 13/05/2016, 13:31

Báo cáo BÀI TẬP LỚN CIMFMS THIẾT LẬP CÁC CHƯƠNG TRÌNH CHO HỆ THỐNG FMS
... FMS CIM Bài làm I.Bố trí sơ đồ mặt hệ thống FMS sơ đồ luồng thông tin hệ Băng tải Phôi Máy CNC Palett Rôbốt Sơ đồ Rôbốt gắp chi tiết từ Trên băng tải đa vào phay Sơ đồ bố trí điểm mà robot đa ... điểm miệng thùng chứa phôi để tránh va quệt.Tay Robot đợc đa dến vị trí ban đầu tiếp tục chu kỳ Sơ đồ khối thuật toán làm việc tay Robot: Kiểm tra có Bật đèn 3, phôibấm không Nút bấm NB1 ,chuông...
Ngày tải lên: 15/05/2016, 21:17

Báo cáo BÀI TẬP LỚN CIMFMS : THIẾT LẬP CÁC CHƯƠNG TRÌNH CHO HỆ THỐNG FMS
... CTM6-K46 Bài làm I.Bố trí sơ đồ mặt hệ thống FMS sơ đồ luồng thông tin hệ Sơ đồ Rôbốt gắp chi tiết từ Băng tải Phôi Máy CNC Palett Rôbốt Trên băng tải đa vào phay Sơ đồ bố trí điểm mà robot đa ... điểm miệng thùng chứa phôi để tránh va quệt.Tay Robot đợc đa dến vị trí ban đầu tiếp tục chu kỳ Sơ đồ khối thuật toán làm việc tay Robot: Nút bấm NB1 đợc bấm ,chuông kêu đèm sáng Thay đổi tốc độ,...
Ngày tải lên: 16/05/2016, 13:57

thiết lập sơ đồ nguyên lý của hệ thống rơle bảo vệ cho khối máy phát – máy biến áp trong nhà máy điện
... mà lựa chọn số lượng chủng loại rơle hệ thống bảo vệ Đối với máy phát công suất lớn, xu lắp đặt hai hệ thống bảo vệ độc lập với nguồn điện thao tác riêng, hệ thống bao gồm bảo vệ số bảo vệ dự phòng ... thực Các thiết bị gọi chung rơle bảo vệ Trong hệ thống điện, rơle bảo vệ theo dõi cách liên tục tình trạng chế độ làm việc tất phẩn tử hệ thống điện Khi xuất cố, rơle bảo vệ phát cô lập phần ... nhanh chóng cách ly máy biến áp bị cố khỏi hệ thống điện, để giảm ảnh hưởng đến hệ thống Sự cố gián tiếp không đòi hỏi cách ly máy biến áp khỏi hệ thống phải phát hiện, có tín hiệu báo cho nhân...
Ngày tải lên: 10/01/2015, 09:10

Ứng dụng thiết bị laser để xây dựng hệ thống biểu điều tra đánh giá tài nguyên rừng tự nhiên
... với hệ số tương quan cao Đó phương tình cần tìm iii) - Lập biểu: Các biểu sau thiết lập Biểu hình số : Từ phưong trình hình số lập trên, ta xác định nhân tố có quan hệ chặt với hình số lập biểu ... váo nhân tố lập biểu ta có biểu thể tích nhân tố, biểu thể tích hai nhân tố, biểu thể tích ba nhân tố - Biểu thể tích nhân tố: Là biểu lập mối quan hệ thể tích V đường kính D Trong biểu ghi thể ... phương trình tối ưu với hệ số tương quan cao Đó phương tình cần tìm Lập quan hệ V với đường kính D1,3, chiều cao H cây: -Lập quan hệ V với D1.3 -Lập quan hệ V Với H -Lập quan hệ V với D1.3 H 19 Từ...
Ngày tải lên: 19/03/2013, 11:25

điều tra và thiết kế xây dựng mô hình hệ thống canh tác bền vững trong chuyển đổi cơ cấu cây trồng nơi đất cao nhiều cát thuộc vùng núi An Giang
Ngày tải lên: 10/04/2013, 16:32

nghiên cứu những khía cạnh kỹ thuật của công nghệ truy nhập vô tuyến WCDMA (chế độ FDD) trong hệ thống UMTS
... khe thời gian Khoảng thời gian khe thời gian Điều chế số liệu (DL/UL) Điều chế trải phổ (DL/UL*) Hệ số trải phổ Dạng xung TD-CDMA *DL/UL - đờng xuống/đờng lên Cỏc tiờu chun dnh cho 3G m 3GPP xõy...
Ngày tải lên: 26/04/2013, 09:50