mô hình toán học của bộ điều khiển mờ

MÔ HÌNH TOÁN HỌC HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC
... Chương MÔ HÌNH TOÁN HỌC HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC 26 September 2006 © H T Hồng - ÐHBK TPHCM Nội dung chương ỉ ỉ ỉ ỉ Khái niệm mô hình toán học Hàm truyền Ø Phép biến đổi ... September 2006 © H T Hồng - ÐHBK TPHCM Khái niệm mô hình toán học 26 September 2006 © H T Hồng - ÐHBK TPHCM Khái niệm mô hình toán học ỉ ỉ ỉ Hệ thống điều khiển thực tế đa dạng có chất vật lý khác Cần ... chung để phân tích, thiết kế hệ thống điều khiển có chất vật lý khác Cơ sở toán học Quan hệ tín hiệu vào tín hiệu hệ thống tuyến tính bất biến liên tục mô tả phương trình vi phân tuyến tính hệ...
Ngày tải lên: 14/10/2013, 16:29

LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG - CHƯƠNG 2 MÔ HÌNH TOÁN HỌC - HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC doc
... Chương MÔ HÌNH TOÁN HỌC HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC February 2006 © H T Hồng - ÐHBK TPHCM Nội dung chương ỉ ỉ ỉ ỉ Khái niệm mô hình toán học Hàm truyền Ø Phép biến đổi ... February 2006 © H T Hồng - ÐHBK TPHCM Khái niệm mô hình toán học February 2006 © H T Hồng - ÐHBK TPHCM Khái niệm mô hình toán học ỉ ỉ ỉ Hệ thống điều khiển thực tế đa dạng có chất vật lý khác Cần ... chung để phân tích, thiết kế hệ thống điều khiển có chất vật lý khác Cơ sở toán học Quan hệ tín hiệu vào tín hiệu hệ thống tuyến tính bất biến liên tục mô tả phương trình vi phân tuyến tính hệ...
Ngày tải lên: 26/07/2014, 06:21

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 1 doc
... mô hình toán học 26 September 2006 © H T Hồng - ÐHBK TPHCM Khái niệm mô hình toán học Hệ thống điều khiển thực tế đa dạng có chất vật lý khác Cần có sở chung để phân tích, thiết kế hệ thống điều ... Chương MÔ HÌNH TOÁN HỌC HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC 26 September 2006 © H T Hồng - ÐHBK TPHCM Nội dung chương Khái niệm mô hình toán học Hàm truyền Phép biến đổi Laplace ... chung để phân tích, thiết kế hệ thống điều khiển có chất vật lý khác Cơ sở toán học Quan hệ tín hiệu vào tín hiệu hệ thống tuyến tính bất biến liên tục mô tả phương trình vi phân tuyến tính hệ...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 2 pdf
... bản: Hàm nấc đơn vò (step): tín hiệu vào hệ thống điều khiển ổn đònh hóa u(t) 1 u (t ) = 0 t ≥ t < L {u (t )} = s t Hàm dirac: thường dùng để mô tả nhiễu t ≠ δ (t ) = ∞ t = +∞ ∫ δ (t )dt ... (t )} = ω s2 + ω Bảng biến đổi Laplace: SV cần học thuộc biến đổi Laplace hàm Các hàm khác tra BẢNG BIẾN ĐỔI LAPLACE phụ lục sách Lý thuyết Điều khiển tự động 26 September 2006 © H T Hồng - ÐHBK ... biến đổi Laplace (tt) Biến đổi Laplace hàm (tt): Hàm dốc đơn vò (Ramp): tín hiệu vào hệ thống điều khiển theo dõi r(t) t r (t ) = tu (t ) = 0 t ≥ t < L {t.u (t )} = s 1 t Hàm mũ e f (t )...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 3 pps
... Hàm truyền điều khiển (khâu hiệu chỉnh) Các khâu hiệu chỉnh tích cực (tt) Khâu vi phân tỉ lệ PD: (Proportional...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 4 docx
... khối Sơ đồ khối hệ thống hình vẽ mô tả chức phần tử tác động qua lại phần tử hệ thống Sơ đồ khối có thành phần Khối chức năng: tín hiệu hàm truyền nhân tín hiệu vào Bộ tổng: tín hiệu tổng đại...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 5 potx
Ngày tải lên: 07/08/2014, 23:24
Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 6 pps
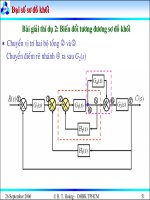
... Hồng - ÐHBK TPHCM 53 Đại số sơ đồ khối Bài giải thí dụ 2: Biến đổi tương đương sơ đồ khối Tính toán cụ thể: H1 * GA = G2 G2 * GB = + G2 H H1 G2 + H1 * GC = + GA = + = G2 G2 G2 G2 + H1 ... Hồng - ÐHBK TPHCM 54 Đại số sơ đồ khối Bài giải thí dụ 2: Biến đổi tương đương sơ đồ khối Tính toán cụ thể (tt): G2G3 + G3 H1 GD + G2 H = * GE = + GD H + G2G3 + G3 H1 H + G2 H G2G3 + G3 H1 ⇒ ... mang tính hệ thống, sơ đồ cụ thể có nhiều cách biến đổi khác nhau, tùy theo trực giác người giải toán Khi tính hàm truyền tương đương ta phải thực nhiều phép tính phân thức đại số, hệ thống phức...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 7 pot
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 8 potx
... Phương trình trạng thái Bằng cách sử dụng biến trạng thái, ta chuyển phương trình vi phân bậc n mô tả hệ thống thành hệ gồm n phương trình vi phân bậc nhất, (hệ phương trình trạng thái) & x(t ... = 2 M bn (*) C = [c1 c K c n ] Chú ý: Tùy theo cách đặt biến trạng thái mà hệ thống mô tả nhiều phương trình trạng thái khác Nếu A ma trận thường, ta gọi (*) phương trình trạng thái ... Cách thành lập PTTT từ PTVP Trường hợp 1: Vế phải PTVP không chứa đạo hàm tín hiệu vào Hệ thống mô tả PTVP dc(t ) d nc(t ) d n−1c(t ) + a1 + L + an−1 + anc(t ) = b0 r (t ) a0 n n −1 dt dt dt Đặt...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 9 pps
... Cách thành lập PTTT từ PTVP Thí dụ trường hợp Viết PTTT mô tả hệ thống có quan hệ vào cho PTVP sau: && & 2&&&(t ) + 5c (t ) + 6c(t ) + 10c(t ) = r (t ) ... 82 Cách thành lập PTTT từ PTVP Trường hợp 2: Vế phải PTVP có chứa đạo hàm tín hiệu vào Hệ thống mô tả PTVP: d n−1c(t ) dc(t ) d nc(t ) + a1 + L + an−1 + anc(t ) = a0 n n −1 dt dt dt d n−1r (t ... September 2006 © H T Hồng - ÐHBK TPHCM 85 Cách thành lập PTTT từ PTVP Thí dụ trường hợp Viết PTTT mô tả hệ thống có quan hệ vào cho PTVP sau: && & & 2&&&(t ) + 5c (t ) + 6c(t ) + 10c(t ) = 10r (t...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 10 ppt
... thuyết Điều khiển tự động Đáp ứng hệ thống? c(t ) = Cx(t ) Thí dụ: xem TD 2.15, Lý thuyết Điều khiển tự động 26 September 2006 © H T Hồng - ÐHBK TPHCM 97 Tóm tắt quan hệ dạng mô tả toán học PT ... September 2006 © H T Hồng - ÐHBK TPHCM 94 Tính hàm truyền từ PTTT Thí dụ Tính hàm truyền hệ thống mô tả PTTT: & x(t ) = Ax(t ) + Br (t ) c(t ) = Cx(t ) 1 0 A= − − 3 3 B= 1 C ... (t ) C 26 September 2006 © H T Hồng - ÐHBK TPHCM 93 Tính hàm truyền từ PTTT Cho hệ thống mô tả PTTT: & x(t ) = Ax(t ) + Br (t ) c(t ) = Cx(t ) Hàm truyền hệ thống là: C (s) -1 G (s)...
Ngày tải lên: 07/08/2014, 23:24

tóm tắt luận văn thạc sĩ kỹ thuật giới thiệu mô hình toán học đối tượng điều khiển
... Ls Ls Ls Ed ref irqd K Kid/s pd+ (+) -Ed (3.32) Mô hình dòng mđkđ trục d irq (+) G (-) pd (S) Ra rid r riq lslr-lm ls lslr-lm ls Eq +Eq Mô hình dòng mđkđ trục q irq ref irq K (+) Kiq/s pq+...
Ngày tải lên: 18/08/2015, 20:45

MÔ HÌNH TOÁN học của ĐỘNG cơ KHÔNG ĐỒNG bộ BA PHA
... xs có dạng hình sin Hình 1.9: Mô hình trạng thái với hệ số hàm ĐCKĐB hệ toạ độ 1.5 Mô hình toán học động không đồng theo định hướng từ trường hệ tọa độ quay đồng pha - mô hình toán học hệ tọa ... độ để nhận mô hình chuyển đổi thuận lợi cho việc xử lý 1.3.1 Khái niệm nguyên tắc phép biến đổi tọa độ Từ trình phân tích mô hình toán học động không đồng nhận thấy, mô hình toán học phức tạp ... làm đối tượng thể hệ thống nhiều biến hình 1.2 1.2 Mô hình toán học liên tục động không đồng ba pha Khi nghiên cứu mô hình toán học nhiều biến động không đồng bộ, thường phải đưa số giả thiết sau:...
Ngày tải lên: 12/12/2015, 10:04

MÔ HÌNH TOÁN học của hệ THỐNG CUNG cấp NHIÊN LIỆU DIESEL THỬ NGHIỆM DẠNG TÍCH TRỮ và điều áp
... cấu điều khiển cung cấp nhiên liệu; ϕ0 - góc xác định vị trí điểm chết xilanh MÔ HÌNH TOÁN HỌC Trên sở sơ đồ nguyên lý hình 1, đưa sơ đồ tính toán hình 2, tiến hành nghiên cứu tính toán hệ thống ... (1)…(7) sở mô hình toán học để tính toán sơ thông số = x0 0;= S0 hệ thống tích trữ nhiên liệu Điều kiện ban đầu 329 Kỷ yếu hội nghị khoa học công nghệ toàn quốc khí - Lần thứ IV KẾT QUẢ TÍNH TOÁN ... nhiên liệu qua van giờ; b - chiều rộng van xả; p0 - áp suất môi trường Trên sở sơ đồ tính toán nghiên cứu, phát triển mô hình toán học để xác định thông số hợp lý hệ thống tích trữ giai đoạn...
Ngày tải lên: 26/12/2015, 08:58

Mô tả toán học hệ thống điều khiển rời rạc
... thống rời rạc thố ời tín hiệu vào c(k) tín hiệu Quan hệ tín hiệu vào tín hiệu hệ thống rời rạc ố mô tả phương trình sai phân: a0 c(k + n) + a1c(k + n − 1) + + an −1c(k + 1) + an c(k ) = b0 r (k ... Hai khâu nối tiếp ối tiế không cách khâu lấy mẫu Hệ thống hồi tiếp có khâu lấy mẫu kênh sai số Hình Hàm truyền G ( z ) = G1 ( z )G2 ( z ) ⎛ G ( z ) = Z {G1 ( s )} ⎞ ⎜ ⎟ ⎜ G ( z ) = Z {G ( s )}⎟ ... mẫu đồng nhánh thuận há h th ậ Hệ thống hồi tiếp có khâu lấy mẫu đồng khâu nối tiếp nhánh thuận Hình Hàm truyền C ( z) = RG ( z ) + GH ( z ) ⎛ RG ( z ) = Z {R ( s )G ( s )} ⎞ ⎜ ⎜ GH ( z ) = Z...
Ngày tải lên: 12/10/2012, 15:29

MÔ TẢ TOÁN HỌC HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG RỜI RẠC
... có cấp n a0 , an ≠ 99 Chương Mô tả toán học hệ thống điều khiển tự động rời rạc 6.3.3 Mô tả không gian trạng thái Tương tự hệ liên tục, phương trình trạng thái mô tả hệ rời rạc có dạng: ⎧ x ... tín hiệu rời rạc: Tín hiệu rời rạc x* ( t ) mô tả biểu thức: x (t ) = * ∞ ∑ x ( nT ) ∂ ( t − nT ) n =0 97 (6.4) Chương Mô tả toán học hệ thống điều khiển tự động rời rạc Chuyển đổi Laplace hàm ... Chương Mô tả toán học hệ thống điều khiển tự động rời rạc 6.1.1 Sơ đồ khối hệ thống u1 ( t ) e ( t ) e ( iT ) WLG ( p ) WLT ( p ) T u (t ) f (t ) y (t ) Hình 6.2 HTĐKTĐ rời rạc...
Ngày tải lên: 29/09/2013, 10:20

mô tả toán học hệ thống điều khiển rời rạc
... hệ thống điều khiển số: Ø Linh Ø Dễ hoạt dàng áp dụng thuật toán điều khiển phức tạp Ø Máy tính số điều khiển nhiều đối tượng lúc 26 September 2006 © H T Hồng - ÐHBK TPHCM Hệ thống điều khiển rời ... thống điều khiển dùng máy tính số r(kT) Máy tính số uR(t) u(kT) D/A Đối tượng c(t) cht(kT) A/D Cảm biến ỉ “Máy tính số” = thiết bò tính toán dựa sở kỹ thuật vi xử lý (vi xử lý, vi điều khiển, ... Chương MÔ TẢ TOÁN HỌC HỆ THỐNG ĐIỀU KHIỂN RỜI RẠC 26 September 2006 © H T Hồng - ÐHBK TPHCM Nội dung chương ỉ ỉ ỉ ỉ Khái...
Ngày tải lên: 14/10/2013, 16:52