điều khiển ô tô mô hình



Tài liệu Đề tài: THIẾT KẾ PHÂN KHUÔN VÀ GIA CÔNG KHUÔN VỎ XE Ô TÔ MÔ HÌNH pptx
... Công nghệ CAD/CAM/CNC GVHD: Trần Đình Sơn gia công qua file NC phù hợp với máy đã chọn để gia công chi tiết (các hệ điều khiển máy như: FANUC, SINUMERIK, HEIDENHAIN, ) 4. Mô phỏng gia công: Mô ... KHOA TRƯỜNG ĐẠI HỌC BÁCH KHOA KHOA CƠ KHÍ KHOA CƠ KHÍ Đề tài: THIẾT KẾ PHÂN KHUÔN VÀ GIA CÔNG KHUÔN VỎ XE Ô TÔ MÔ HÌNH Giáo viên hướng dẫn Giáo viên hướng dẫn : Trần Đình Sơn : Trần Đình Sơn Sinh ... thuật và điều kiện làm việc của chi tiết 9 CHƯƠNG III.PHÂN KHUÔN VÀ LẬP QUY TRÌNH CÔNG NGHỆ GIA CÔNG 10 3.1 Phân khuôn 10 3.2 Lập quy trình công nghệ gia công 17 3.2.1 Khả năng công nghệ gia công...
Ngày tải lên: 26/02/2014, 23:20

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 1 doc
... 4 Khái niệm về mô hình toán học Khái niệm về mô hình toán học 26 September 2006 â H. T. Hong - éHBK TPHCM 7 Một số thí dụ mô tả hệ thống bằng phương trình vi phân Một số thí dụ mô tả hệ thống ... hệ thống tuyến tính bất biến liên tục có thể mô tả bằng phương trình vi phân tuyến tính hệ số hằng: Khái niệm về mô hình toán học Khái niệm về mô hình toán học =++++ − − − )( )()()( 1 1 1 10 tca d t tdc a d t tcd a d t tcd a nn n n n n L )( )()()( 1 1 1 10 trb d t tdr b d t trd b d t trd b mm m m m m ++++ − − − L Hệ ... September 2006 â H. T. Hong - éHBK TPHCM 1 LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG Giảng viên: TS. Huỳnh Thái Hoàng Bộ môn Điều Khiển Tự Động Khoa Điện – Điện Tử Đại học Bách Khoa...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 2 pdf
... Hong - éHBK TPHCM 19 Mạch tích phân bậc 1: Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh) Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh) Các khâu hiệu chỉnh thụ động R C 1 1 )( + = RCs sG R C ... Laplace của các hàm cơ bản: Hàm nấc đơn vị (step): tín hiệu vào hệ thống điều khiển ổn định hóa Hàm dirac: thường dùng để mô tả nhiễu {} s tu 1 )( =L < ≥ = 0 t 0 0 t 1 )( neáu neáu tu u(t) t 0 1 =∞ ≠ = 0 ... vào tín hiệu ra và tín hiệu vào mà chỉ phụ thuộc vào cấu trúc và thông số của hệ thống. Do đó có thể dùng hàm truyền để mô tả hệ thống. Định nghóa hàm truyền (tt) Định nghóa haøm truyeàn (tt) nn nn mm mm asasasa bsbsbsb sR sC sG ++++ ++++ == − − − − 1 1 10 1 1 10 )( )( )( L L ...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 3 pps
... 26 September 2006 â H. T. Hong - éHBK TPHCM 22 Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh) Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh) Các khâu hiệu chỉnh tích cực (tt) Khâu vi ... 26 September 2006 â H. T. Hong - éHBK TPHCM 21 Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh) Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh) Các khâu hiệu chỉnh tích cực P KsG = )( Khâu ... 29 Hàm truyền của các đối tượng thường gặp (tt) Hàm truyền của các đối tượng thường gặp (tt) Xe ô tô )()( )( tftBv dt tdv M =+ M: khối lượng xe B hệ số ma sát f(t): lực kéo v(t): tốc độ xe ...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 4 docx
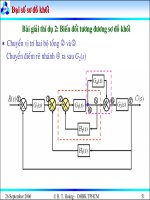
... T. Hong - éHBK TPHCM 34 Đại số sơ đồ khối Đại số sơ đồ khối Sơ đồ khối của một hệ thống là hình vẽ mô tả chức năng của các phần tử và sự tác động qua lại giữa các phần tử trong hệ thống. Sơ ... thang: )( )()( 2 2 tK dt tdy B d t tyd M T τ =+ BssM K s sY sG T + == 2 )( )( )( τ Nếu khối lượng buồng thang không bằng khối lượng đối trọng? 26 September 2006 â H. T. Hong - éHBK TPHCM 32 Hàm truyền của cảm...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 5 potx
... T. Hong - éHBK TPHCM 46 Đại số sơ đồ khối Đại số sơ đồ khối Chú ý Không được chuyển vị trí điểm rẽ nhánh và bộ tổng : Không được chuyển vị trí 2 bộ tổng khi giữa 2 bộ tổng có điểm rẽ nhánh...
Ngày tải lên: 07/08/2014, 23:24
Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 6 pps
... sơ đồ khối là một phương pháp đơn giản. Khuyết điểm của phương pháp biến đổi sơ đồ khối là không mang tính hệ thống, mỗi sơ đồ cụ thể có thể có nhiều cách biến đổi khác nhau, tùy theo trực...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 7 pot
... đồ dòng tín hiệu Công thức Mason Công thức Mason Hàm truyền tương đương từ một nút nguồn đến một nút đích của hệ thống tự động biểu diễn bằng sơ đồ dòng tín hiệu được cho bôûi: ∑ ∆ ∆ = k kk PG 1 ...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 8 potx
... phân bậc n mô tả hệ thống thành hệ gồm n phương trình vi phân bậc nhất, (hệ phương trình trạng thái) (*) trong đó Chú ý: Tùy theo cách đặt biến trạng thái mà một hệ thống có thể được mô tả bằng ... từ PTVP Cách thành lập PTTT từ PTVP Trường hợp 1: Vế phải của PTVP không chứa đạo hàm của Trường hợp 1: Vế phải của PTVP không chứa đạo hàm của tín hiệu vào tín hiệu vào )()( )()()( 01 1 1 10 trbtca dt tdc a d t tcd a d t tcd a nn n n n n =++++ − − − L ... vào )()( )()()( 01 1 1 10 trbtca dt tdc a d t tcd a d t tcd a nn n n n n =++++ − − − L Hệ thống mô tả bởi PTVP )()( )()( )()( )()( 1 23 12 1 txtx txtx txtx tctx nn − = = = = & M & & ...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 9 pps
... lập PTTT từ PTVP Cách thành lập PTTT từ PTVP Thí dụ trường hợp 1 Thí dụ trường hợp 1 Viết PTTT mô tả hệ thống có quan hệ vào ra cho bởi PTVP sau: )()(10)(6)(5)(2 t r tctctctc = + + + &&&&&& −−− = −−− = 5.235 100 010 100 010 0 1 0 2 0 3 a a a a a a A = = 5.0 0 0 0 0 0 0 a b B [ ] 001 = C = = = )()( )()( )()( 23 12 1 txtx txtx tctx & & ... hàm của tín Trường hợp 2: Vế phải của PTVP có chứa đạo hàm của tín hiệu vào hiệu vào Hệ thống mô tả bởi PTVP: =++++ − − − )( )()()( 1 1 1 10 tca dt tdc a dt tcd a dt tcd a nn n n n n L )( )()()( 12 1 2 1 1 1 0 trb dt tdr b dt trd b dt trd b nn n n n n −− − − − − ++++ ... lập PTTT từ PTVP Cách thành lập PTTT từ PTVP Thí dụ trường hợp 2 Thí dụ trường hợp 2 Viết PTTT mô tả hệ thống có quan hệ vào ra cho bởi PTVP sau: [ ] 001 = C Phương trình trạng thái: = + = )()( )()()( ttc trtt Cx B A x x & −−− = −−− = 5.235 100 010 100 010 0 1 0 2 0 3 a a a a a a A trong...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 10 ppt
... Φ=Φ − L 1 )()( − −=Φ A I ss Trong đó: ma trận quá độ Thí dụ: xem TD 2.15, Lý thuyết Điều khiển tự động Đáp ứng của hệ thống? )()( tt Cx c = Chứng minh: xem Lý thuyết Điều khiển tự động ... 2006 â H. T. Hong - éHBK TPHCM 94 Tính hàm truyền từ PTTT Tính hàm truyền từ PTTT Cho hệ thống mô tả bởi PTTT: = + = )()( )()()( ttc trtt Cx B A x x & Hàm truyền của hệ thống là: () BAIC 1- −== ... sơ đồ khối Thành lập PTTT từ sơ đồ khối Thí dụ Thí dụ Hãy thành lập hệ phương trình trạng thái mô tả hệ thống có sơ đồ khối như sau: R(s) + − C(s) )3)(1( 10 ++ sss Đặt biến trạng thái trên...
Ngày tải lên: 07/08/2014, 23:24

nghiên cứu điều khiển nồng độ của sản phẩm trong bể chứa phản ứng có khuấy bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu
Ngày tải lên: 04/10/2014, 06:36

Động lực học và điều khiển ô tô vehicle dynamics and control
Ngày tải lên: 13/10/2014, 22:09


Đồ án Lý thuyết điều khiển tự động: Mô hình hóa động cơ điện một chiều
Ngày tải lên: 07/03/2015, 21:40

ĐỒ ÁN MÔN HỌC VI ĐIỀU KHIỂN: Thiết kế mô hình bảng led điện tử dùng một ma trận led đa sắc
Ngày tải lên: 09/05/2015, 19:57