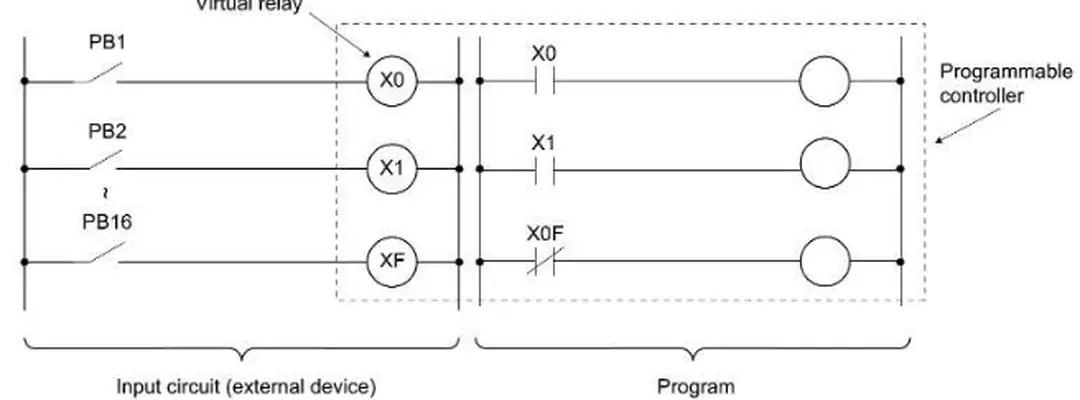
Đồ án tốt nghiệp SV Nguyễn Văn Khá i GIẤY ĐĂNG KÝ KHÓA LUẬN TỐT NGHIỆP HỌ VÀ TÊN SINH VIÊN MSSV LỚP Đã đăng ký với giảng viên và được giảng viên đồng ý hướng dẫn khóa luận tốt nghiệp với tên đề tài là Ngày tháng năm 2018 Giảng viên Phần bổ sung dành cho sinh viên làm KLTN có mô hình Sinh viên xin đăng ký làm khóa luận tốt nghiệp có mô hình và tự chịu chi phí để thực hiện mô hình Ngày tháng năm 2018 Sinh viên ký và ghi rõ họ tên Đồ án tốt nghiệp SV Nguyễn Văn Khá ii NHẬN XÉT GIÁO VIÊN HƯỚNG DẪN Đ.
Đồ án tốt nghiệp SV: Nguyễn Văn Khá GIẤY ĐĂNG KÝ KHÓA LUẬN TỐT NGHIỆP HỌ VÀ TÊN SINH VIÊN: MSSV: LỚP: Đã đăng ký với giảng viên giảng viên đồng ý hướng dẫn khóa luận tốt nghiệp với tên đề tài là: Phần bổ sung dành cho sinh viên làm KLTN có mơ hình Sinh viên xin đăng ký làm khóa luận tốt nghiệp có mơ hình tự chịu chi phí để thực mơ hình Ngày tháng năm 2018 Sinh viên ký ghi rõ họ tên Ngày tháng năm 2018 Giảng viên i Đồ án tốt nghiệp SV: Nguyễn Văn Khá NHẬN XÉT GIÁO VIÊN HƯỚNG DẪN ii Đồ án tốt nghiệp SV: Nguyễn Văn Khá NHẬN XÉT CỦA GIÁO VIÊN PHẢN BIỆN iii Đồ án tốt nghiệp SV: Nguyễn Văn Khá MỤC LỤC GIẤY ĐĂNG KÝ KHÓA LUẬN TỐT NGHIỆP i NHẬN XÉT GIÁO VIÊN HƯỚNG DẪN ii NHẬN XÉT CỦA GIÁO VIÊN PHẢN BIỆN iii MỤC LỤC iv DANH SÁCH CÁC HÌNH viii DANH SÁCH CÁC BẢNG xii Lời Mở Đầu xiv CHƯƠNG TỔNG QUAN VỀ ĐỀ TÀI 1.1 Đặt vấn đề 1.2 Mục tiêu đề tài 1.3 Phương pháp nghiêm cứu 1.4 Thời gian nghiên cứu 1.5 Ý nghĩa khoa học thực tiễn đề tài CHƯƠNG CƠ SỞ LÝ THUYẾT 2.1 Thiết bị điều khiển PLC MELSEC iQ-R 2.1.1 Giới thiệu sê ri PLC MELSEC iQ-R 2.1.2 Các Mô đun sử dụng 2.2 Các loại cảm biến 36 2.2.1 Khái niệm cảm biến 36 2.2.2 Cảm biến tiệm cận 36 2.2.3 Cảm biến từ piston 37 2.2.4 Cảm biến quang khuếch tán .37 2.2.5 Cơng tắc hành trình 37 2.2.6 Sơ đồ đấu dây cảm biến với tải 37 2.3 Thiết bị khí nén 37 iv Đồ án tốt nghiệp SV: Nguyễn Văn Khá 2.3.1 Xi lanh khí nén 37 2.3.2 Van điện từ 38 2.4 Biến tần 38 2.4.1 Chức .38 2.4.2 Cấu tạo 39 2.4.3 Nguyên lý hoạt động .39 2.4.4 Ứng dụng tiết kiệm điện 40 2.4.5 Biến tần Mitsubishi FR-E520s 40 2.5 Encoder 43 2.5.1 khái niệm .43 2.5.2 Nguyên lý hoạt động Encoder tương đối 43 2.5.3 Encoder omrom E6B2 – CWZ6C 45 CHƯƠNG HỆ THỐNG TỰ ĐỘNG HÓA 46 3.1 Trạm Kho Sắp Xếp Và Lưu Trữ 46 3.1.1 Cơ cấu nâng hạ 47 3.1.2 Cơ cấu Piston lấy hàng 48 3.1.3 Khây lấy hàng 48 3.1.4 Cảm biến vị trí có hàng 48 3.1.5 Cảm biến vị trí .49 3.1.6 Cảm biến vị trí bên phải 49 3.1.7 Cảm biến vị trí hàng 49 3.1.8 Cảm biến vị trí cột 50 3.1.9 Xác định vị trí I/O 50 3.1.10 Sơ đồ đấu dây toàn hệ thống 51 3.2 Trạm Vận Chuyển 52 3.2.1 Cơ Cấu Băng Tải .53 v Đồ án tốt nghiệp SV: Nguyễn Văn Khá 3.2.2 Cơ Cấu Pitton 54 3.2.3 Cảm Biến 54 3.2.4 Sơ đồ đấu dây toàn hệ thống trạm Vận Chuyển .54 3.3 Trạm Gắp Phôi Và Gia Công 55 3.3.1 Cơ Cấu Tay Gấp Chuyển Động .56 3.3.2 Cơ Cấu Tay Gấp Quay 56 3.3.3 Cơ Cấu Băng Tải .57 3.3.4 Van Khí Nén Và Ống Khí .57 3.3.5 Cảm Biến Trong Trạm 57 3.3.6 Vị trí I/O trạm 58 3.3.7 Sơ đồ đấu dây tồn hệ thống trạm Gắp phơi 59 3.4 Trạm Cấp Phôi 60 3.4.1 Công Tắc Hành Trình 61 3.4.2 Cơ Cấu Cấp Phôi .61 3.4.3 Cơ Cấu Pitton Đẩy 61 3.4.4 Cơ Cấu Bàn Xoay 62 3.4.5 Cơ Cấu Van Hút 62 3.4.6 Vị Trí I/O trạm .62 3.4.7 Sơ đồ đấu dây toàn hệ thống trạm Cấp phôi .63 CHƯƠNG SCADA Hệ thống giám sát thu thập liệu 64 4.1 Giới Thiệu SCADA 64 4.2 Thiết Lập Mạng Truyền Thông 65 4.2.1 Mạng Truyền Thông CC-Link 67 4.2.2 Mạng Truyền Thông CC-Link IEF 69 4.2.3 Sử dụng MELSOFT Navigator 71 4.3 Giới thiệu phần mềm SCADA MC Works 64 75 vi Đồ án tốt nghiệp SV: Nguyễn Văn Khá 4.3.1 MC Works 64 ? .75 4.3.2 Các cơng cụ có MC Works64 78 4.4 Công Cụ OLE for Process Control 89 4.5 Phần mềm ScriptWorX64 91 4.5.1 Công Cụ Unified Data Manager 92 4.5.2 Phần mềm Microsoft Visual Basic 92 4.6 Phần mềm Microsoft SQL Server 93 Tài Liệu Tham Khảo 95 PHỤ LỤC vii Đồ án tốt nghiệp SV: Nguyễn Văn Khá DANH SÁCH CÁC HÌNH Hình 2.1 Ưu điểm iQ-R Hình 2.2 Mơ đun iQ-R R04ENCPU Hình 2.3 Ngõ vào input nhận tín hiệu từ bên ngồi 11 Hình 2.4 Mơ đun Input RX42C4 13 Hình 2.5 Sơ đồ đấu dây ngõ vào 15 Hình 2.6 Mơ đun Output RY42NT2P 15 Hình 2.7 Sơ đồ mạch mơ đun Output 17 Hình 2.8 Mô đun đếm xung tốc độ cao RD62P2 17 Hình 2.9 Kết nối Encoder với Mô đun đếm xung 20 Hình 2.10 Linear counter 20 Hình 2.11 Ring counter function 21 Hình 2.12 Mơ đun R60AD4 21 Hình 2.13 Đấu dây cho mô đun R60AD4 24 Hình 2.14 Mơ đun R60DA4 25 Hình 2.15 Sơ đồ đấu dây cho mô đun R60DA4 28 Hình 2.16 Mơ đun truyền thơng RJ71EN71 CCIEF 29 Hình 2.17 Mô đun truyền thông RJ61BT11 30 Hình 2.18 Đường truyền liệu truyền thơng CC-link 34 Hình 2.19 Mơ đun cấp nguồn 35 Hình 2.20 Main base unit 36 Hình 2.21 Sơ đồ đấu dây cảm biến PNP 37 Hình 2.22 Xi lanh chiều 38 Hình 2.23 Xi lanh kẹp 38 Hình 2.24 Van điện từ 5/2 38 Hình 2.25 Nguyên lý hoạt động biến tần 39 Hình 2.26 Biến Tần FR-E520S 41 Hình 2.27 Sơ đồ kết nối Biến Tần FR-E500 42 Hình 2.28 Nguyên lý hoạt động Encoder 43 Hình 2.29 Độ lệch pha kênh A kênh B 44 Hình 2.30 Encoder omrom E6B2 – CWZ6C 45 viii Đồ án tốt nghiệp SV: Nguyễn Văn Khá Hình 3.1 Trạm xếp lưu trữ 46 Hình 3.2 Motor nâng hạ 47 Hình 3.3 Piston lấy hàng 48 Hình 3.4 Khây lấy hàng 48 Hình 3.5 Cảm biến vị trí có hàng 48 Hình 3.6 Cảm biến vị trí 49 Hình 3.7 Cảm biến vị trí bên phải 49 Hình 3.8 Cảm biến vị trí hàng 49 Hình 3.9 Cảm biến vị trí cột 50 Hình 3.10 Trạm vận chuyển 52 Hình 3.11 Cơ cấu băng tải 53 Hình 3.12 Cơ cấu piston nâng hạ băng tải 54 Hình 3.13 Cảm biến từ piton 54 Hình 3.14 Cảm biến quang 54 Hình 3.15 Cảm biến có phơi 54 Hình 3.16 Trạm gắp phôi gia công 55 Hình 3.17 Cơ cấu tay gắp 56 Hình 3.18 Cơ cấu tay gắp quay 56 Hình 3.19 Cơ cấu băng tải 57 Hình 3.20 Van ống khí nén 57 Hình 3.21 Cảm biến từ Piston 57 Hình 3.22 : Cảm biến xác định vị trí tay gắp 58 Hình 3.23 Cảm biến quang khuếch tán 58 Hình 3.24 Trạm cấp phơi 60 Hình 3.25 Cơng tắc hành trình 61 Hình 3.26 Cơ cấu cấp phơi 61 Hình 3.27 Cơ cấu piston đẩy 62 Hình 3.28 Cơ cấu bàn xoay 62 Hình 3.29 Cơ cấu van hút 62 Hình 4.1 Sự cần thiết modle truyền thông 65 Hình 4.2 Cấu trúc mạng CC-Link 67 Hình 4.3 Chiều dài cấu hình mạng CC-Link 68 ix Đồ án tốt nghiệp SV: Nguyễn Văn Khá 4.3.2.4 EarthWorX64 Sử dụng EarthWorX kết hợp cơng nghệ để nhanh chóng xem điều kiện báo động cho vị trí giới, sử dụng đồ có sẵn với Microsoft Bing.EarthWorX giúp bạn hình dung tài sản phân tán theo địa lý (như nhà máy, sở Hình 4.38 Cửa sổ EarthWorX64 vật chất, trang web việc làm) theo dõi vật thể di động sử dụng GPS tọa độ 4.3.2.5 GridWorX Hình 4.39 Cửa sổ GridWorX GridWorX dùng để chỉnh sửa cập nhật bảng database MC Works64 GridWorX Server cài đặt Workbench GridWorX Viewer dùng để hiển thị GraphWorX64 để giám sát liệu Cơ sở sữ liệu GribWorX hỗ trợ cho tản quản lý sở liệu phổ biến : OLE DB Connection, ODBC Connection, Oracle Connection, SAP Connection, SQL Server Connection Cách tạo GribWorX : B1 : Tạo Data Source cho bảng cần hiển thị GridWorX Sử dụng công cụ Workbench GridWorX Server để tạo liệu nguồn dùng GribWorX Cơ sỡ liệu dùng SQL Server , với database Northwind, database click chọn để tạo nguồn cở sở liệu Sau tạo sở liệu, Có thể 87 Đồ án tốt nghiệp SV: Nguyễn Văn Khá viết lệnh Query khung Command, dùng công cụ khoanh đỏ để tạo câu lệnh Query chọn cột bảng muốn hiển thị Hình 4.40 Cửa sổ GribWorX Server B2 : Tạo cửa sổ GribWorX Viewer Workbench GraphWorX Sau tạo cửa sổ GribWorX hình 121, Click chọn Edit để cấu hình cho cửa sổ Viewer, cửa sổ Configure cài đặt cấu hình hiển thị chọn nguồn sở liệu vừa tạo bước cửa sổ Data Brower 88 Đồ án tốt nghiệp SV: Nguyễn Văn Khá Hình 4.41 Cửa sổ Configure GribWorX Viewer 4.4 Cơng Cụ OLE for Process Control OLE for Process Control ( OPC ) tiêu chuẩn để tiếp cận giao tiếp với nguồn liệu ( PLCs,controllers, I/O device, database… ) Nó tăng cường giao diện ứng dụng máy khách máy chủ cách cung cấp chế hỗ trợ tài liệu tốt để phổ biến liệu từ nguồn liệu tới ứng dụng khách Trong khơng hướng dẫn chi tiết cách chuyển liệu mà cịn thơng tin cụ thể thuộc tính khác để bổ sung cho liệu đó, chẳng hạn thông tin phạm vi, loại liệu, cờ chất lượng, thơng tin ngày Hình trình bày Kiến trúc OPC, giới thiệu OPC Foundation Bằng cách theo kiến trúc OPC, thiết bị cần trình điều khiển tiêu chuẩn, máy chủ OPCcompliant Tất ứng dụng khách hàng tuân thủ OPC sau kết nối với thiết bị đó, mạng cục qua mạng Hơn nữa, kết nối thực cho nhiều máy chủ OPC lúc 89 Đồ án tốt nghiệp SV: Nguyễn Văn Khá Hình 4.42 Cấu trúc OPC 4.4.1.1 Công Cụ OPC Unified Architecture Hiện phần mềm SCADA kết nối với PLC thông qua cách phổ biến: Thông qua Driver trực tiếp, SCADA sử dụng hàm đọc / ghi cấu hình file driver (DLL) để truy cập đến PLC Thông qua DDE (Dynamic Data Exchange) server, SCADA đóng vái trị DDE client Thơng qua OPC Server, SCADA đóng vai trị OPC Client Thực tế người dùng hay dùng driver trực tiếp để kết nối với PLC Khi khơng có driver trực tiếp, người dùng sử dụng OPC DA số điểm hạn chế OPC DA phần tích sau : Tốc độ truy cập SCADA đến PLC bị giảm phải truy cập qua phần mềm trung gian Việc truy cập mạng LAN khó thực hiện, Khi SCADA chạy máy tính khác Để làm truy cập máy tính khác phải đăng nhập User Password, phải dùng Dcom config để cấu hình hàng loạt thơng số khơng tường minh OPC DA sử dụng port 135, Port nằm dãy bị chặn Firewall truyền thông, nên việt truy cập mạng LAN trở nên khó khăn Client Server không kết nối qua mạng Inthernet OPC DA chạy hệ điều hành Window mà chạy Net 90 Đồ án tốt nghiệp SV: Nguyễn Văn Khá 4.5 Phần mềm ScriptWorX64 ScriptWorX64 cho phép bạn tạo chạy chương trình Script Các Script viết Microsoft Visual Basic cho ứng dụng (VBA) chạy đối tượng đa luồng Cấu hình ScriptWorX64 cho biết loại tập lệnh tạo thực Ứng dụng ScriptWorX64 độc lập mạnh mẽ, chạy độc lập chạy NT Service ScriptWorX cho phép tạo quản lý chương trình script Visual Basic, tạo mơi trường tích hợp nhiều q trình scripts thực thi cách đồng thời Người dùng định nghĩa VBA đọc ghi liệu OPC OPC Server Giao tiếp với thiết bị nhà máy chẳng hạn PLC hay máy chủ tuân thủ chuẩn OPC ScriptWorX64 đồng thời thực việc tính tốn, quản lý sở liệu thực thao tác có sẵn ngơn ngữ VBA để truy cập vào báo cáo thực hoạt động công thức ScriptWorX64 cung cấp project dự án có sẵn Các Script kích hoạt dựa OPC Data Access, OPC Alarm Events, file kiện Hình 4.43 Cửa sổ ScriptsWorX Dưới cấu trúc SriptWorX, bao gồm trình quản lý tạo Trigger dựa OPC DA hay Date/Time, Chương trình Script thực thi dựa vào Trigger này, Scripts xử lý thông tin lưu trữ báo cáo phản hồi lại 91 Đồ án tốt nghiệp SV: Nguyễn Văn Khá Hình 4.44 Cấu trúc ScriptWorX 4.5.1 Công Cụ Unified Data Manager Unified Data Manager (UDM) công cụ dùng để tạo liệu Trigger đễ thực thi Script VBA UDM đọc liệu từ OPC Server nhận dạng liệu tạo kiện Trigger từ Tag, Alarm, hay Trigger dựa vào thời gian theo chu kỳ Hình 4.45 Cửa sổ Unifid Data Manager 4.5.2 Phần mềm Microsoft Visual Basic Visual Basic ngơn ngữ lập trình hướng kiện hệ thứ ba Microsoft phát hành lần vào năm 1991 Nó phát triển từ phiên DOS cũ có tên BASIC BASIC nghĩa Beginners' All purpose Symbolic Instruction Code Kể từ Microsoft phát hành nhiều phiên Visual Basic, từ Visual Basic 1.0 đến phiên cuối Visual Basic 6.0 Visual Basic ngơn ngữ lập trình thân thiện với 92 Đồ án tốt nghiệp SV: Nguyễn Văn Khá người dùng thiết kế cho người bắt đầu cho phép người phát triển ứng dụng cửa sổ GUI dễ dàng ScriptWorX sử dụng ngôn ngữ visual basic 6.5 cho phép thực tính VB đồng thời được hỗ trợ script đọc viết liệu OPC, thực thi chương trình scripts dựa vào OPC Tag Trigger Hình 4.46 Cửa sổ Visual Basic 4.6 Phần mềm Microsoft SQL Server Microsoft SQL Server hệ quản lý sở liệu quan hệ phát triển Microsoft Như máy chủ sở liệu , sản phẩm phần mềm có chức lưu trữ truy xuất liệu theo yêu cầu ứng dụng phần mềm khác - chạy máy tính máy tính khác qua mạng (kể Internet) Microsoft có chục phiên khác Microsoft SQL Server, nhằm vào đối tượng khác cho khối lượng công việc từ ứng dụng máy tính nhỏ ứng dụng Internet lớn với nhiều người dùng đồng thời Phần mềm SCADA mitsubishi hỗ trợ phiên Microsoft SQL Server 2014 Cả công cụ MC Works64 Trend, Logger, Alarm, GridWorX điều sử dụng SQL Server để lưu trữ liệu cách dễ dàng khoa học Các lệnh SQL : Tạo sở liệu CREATE DATABASE [tên sở liệu]; 93 Đồ án tốt nghiệp SV: Nguyễn Văn Khá Tạo Table Create Table [tên table] ( [tên cột] [kiểu liệu], [tên cột] [kiểu liệu], ) Lệnh Select Select [tên cột],[tên cột] FROM [tên table]; Hình 4.47 Giao diện SQL 2014 94 Đồ án tốt nghiệp SV: Nguyễn Văn Khá Tài Liệu Tham Khảo [1] E.A.Bryan Luis A Bryan, Programmable Controllers Theory and Implementation, Published by Industrial Text Company,1988 [2] Mitsubishi electric, MELSEC iQ-R Channel Isolated Analog-Digital Converter Module -User’s Manual ( Startup) [3] Mitsubishi electric, MELSEC iQ-R Channel Isolated Analog-Digital Converter Module User’s Manual ( Application) [4] Mitsubishi electric, MELSEC iQ-R Channel Isolated Digital- Analog Converter Module User’s Manual ( Startup) [5] Mitsubishi electric, MELSEC iQ-R Channel Isolated Digital- Analog Converter Module User’s Manual ( Application) [6] Mitsubishi electric, MELSEC iQ-R CPU Module User’s Manual [7] Mitsubishi electric, MELSEC iQ-R CC-Link System Master/Local Module User’s Manual ( Startup ) [8] Mitsubishi electric, MELSEC iQ-R CC-Link System Master/Local Module User’s Manual ( Application ) [9] Mitsubishi electric, MELSEC iQ-R Enthernet/CC-Link IE User’s Manual [10] Mitsubishi electric, MELSEC iQ-R Module Configuration Manual [11] Mitsubishi electric, MELSEC iQ-R High-Speed Counter Module User’s Manual ( Startup) [12] Mitsubishi electric, MELSEC iQ-R High-Speed Counter Module User’s Manual ( Application) [13] Mitsubishi electric, MELSEC iQ-R I/O Module User’s Manual [14] Mitsubishi electric, MELSEC iQ-R Series iQ Platform-compatible PAC 95 Đồ án tốt nghiệp SV: Nguyễn Văn Khá PHỤ LỤC Đồ án tốt nghiệp Sơ đồ đấu dây trạm Lưu Kho SV: Nguyễn Văn Khá Đồ án tốt nghiệp Sơ đồ đấu dây trạm Vận Chuyển SV: Nguyễn Văn Khá Đồ án tốt nghiệp Sơ đồ đấu dây Trạm Gắp phôi SV: Nguyễn Văn Khá Đồ án tốt nghiệp Sơ đồ đấu dây trạm Cấp phôi SV: Nguyễn Văn Khá Đồ án tốt nghiệp SV: Nguyễn Văn Khá LỜI CẢM ƠN Được phân công quý thầy cô khoa Công Nghệ Điện, Trường Đại Học Công Nghiệp Tp.HCM, sau thời trang thực hiện, em hoàn thành Khóa luận tốt nghiệp “ Lập trình ứng dụng hệ thống tự động hóa sản xuất Mitsubishi với PLC họ iQR ” Em xin gửi đến thầy Nguyễn Anh Tuấn lời cám ơn chân thành nhất, cảm ơn thầy tận tình giúp đỡ, hướng dẫn em suất trình hồn thành luận văn, suốt q trình học tập trường Chân thành cám ơn Ban Giám Hiệu trường Đại học Công Nghiệp Tp.HCM, quý thầy cô khoa Công Nghệ Điện, thầy Ngô Thanh Quyền tận tình giảng dạy, trang bị cho em kiến thức bổ ích, quý báu suốt thời gian học trường Tuy nhiên kiến thức chun mơn cịn hạn chế, kinh nghiệm thực tiễn thiếu thời gian thực có hạn nên luận văn khơng tránh khỏi thiếu sót, em mong nhận ý kiến đóng góp q thầy để em hoàn thành tốt Xin chân thành cám ơn! Sinh viên thực Nguyễn Văn Khá ... ? ?Lập trình hệ thống tự động hóa sản xuất ứng dụng PLC MELSEC iQ-R? ?? thiết thực có khả nâng ứng dụng rộng rãi tương lai Vì tơi định thực đề tài tài ? ?Lập trình hệ thống tự động hóa sản xuất ứng dụng. .. Ở hệ thống tự động có quy mơ vừa lớn PLC sử dụng làm thiết bị điều khiển cho toàn hệ thống Với tài ứng dụng PLC iQ-R vào tự động hóa, đề tài mới, đầu ứng dụng PLC iQ-R vào sản xuất, xây dựng hệ. .. trước FX1N hay FX3U… Với đề tài “ Lập trình hệ thống tự động hóa sản xuất ứng dụng PLC MELSEC iQ-R? ??, tiếp xúc với dòng điều khiển tự động PLC Mitsubishi electric Sau trình học tập rèn luyện nghiênLập trình hệ thống tự động hóa sản xuất ứng dụng PLC MELSEC iQR
116
67
0
THÔNG TIN TÀI LIỆU
Thông tin cơ bản
| Tiêu đề | Lập Trình Hệ Thống Tự Động Hóa Sản Xuất Ứng Dụng PLC MELSEC iQR |
|---|---|
| Tác giả | Nguyễn Văn Khá |
| Thể loại | Đồ án tốt nghiệp |
| Năm xuất bản | 2018 |
| Định dạng | |
|---|---|
| Số trang | 116 |
| Dung lượng | 4,31 MB |
Nội dung
Ngày đăng: 25/06/2022, 11:14
Nguồn tham khảo
| Tài liệu tham khảo | Loại | Chi tiết |
|---|---|---|
| [1] E.A.Bryan và Luis A. Bryan, Programmable Controllers Theory and Implementation, Published by Industrial Text Company,1988 | Khác | |
| [2] Mitsubishi electric, MELSEC iQ-R Channel Isolated Analog-Digital Converter Module -User’s Manual ( Startup) | Khác | |
| [3] Mitsubishi electric, MELSEC iQ-R Channel Isolated Analog-Digital Converter Module User’s Manual ( Application) | Khác | |
| [4] Mitsubishi electric, MELSEC iQ-R Channel Isolated Digital- Analog Converter Module User’s Manual ( Startup) | Khác | |
| [5] Mitsubishi electric, MELSEC iQ-R Channel Isolated Digital- Analog Converter Module User’s Manual ( Application) | Khác | |
| [6] Mitsubishi electric, MELSEC iQ-R CPU Module User’s Manual | Khác | |
| [7] Mitsubishi electric, MELSEC iQ-R CC-Link System Master/Local Module User’s Manual ( Startup ) | Khác | |
| [8] Mitsubishi electric, MELSEC iQ-R CC-Link System Master/Local Module User’s Manual ( Application ) | Khác | |
| [9] Mitsubishi electric, MELSEC iQ-R Enthernet/CC-Link IE User’s Manual | Khác | |
| [10] Mitsubishi electric, MELSEC iQ-R Module Configuration Manual | Khác | |
| [11] Mitsubishi electric, MELSEC iQ-R High-Speed Counter Module User’s Manual ( Startup) | Khác | |
| [12] Mitsubishi electric, MELSEC iQ-R High-Speed Counter Module User’s Manual ( Application) | Khác | |
| [13] Mitsubishi electric, MELSEC iQ-R I/O Module User’s Manual | Khác | |
| [14] Mitsubishi electric, MELSEC iQ-R Series iQ Platform-compatible PAC | Khác |
HÌNH ẢNH LIÊN QUAN

























TRÍCH ĐOẠN
.28 Nguyên lý hoạt động Encoder
.1 Trạm sắp xếp và lưu trữ
Trạm Vận Chuyển Trạm Gắp Phôi Và Gia Công Trạm Cấp Phôi .7 Vị Trí I/O trong trạm Cấp phôi .12 Cấu hình giao tiếp giữa plc và pc Công Cụ OLE for Process ControlTÀI LIỆU CÙNG NGƯỜI DÙNG
-
138 52 0
-
76 4 0
-
97 9 0
-
137 10 0
-
205 8 0
-
80 18 3
TÀI LIỆU LIÊN QUAN
-
40 3 0
-
46 2 0
-
62 5 0
-
51 1 0
-
288 5 0
-
116 67 0
-
188 6 0
-
161 12 0