các lực điện từ khi kể đến từ hóa lõi thép

Đề xuất phương pháp điều khiển phản hồi đầu ra LQG cho ổ đỡ từ bốn bậc tự do
... tớn hiu u vo cho b iu khin Mt b vi x lý úng vai trũ nh l mt b iu khin to tớn hiu iu khin t thụng tin o lng, mt b khuch i cụng sut chuyn tớn hiu iu khin ny thnh dũng in iu khin, v dũng in ny s ... h s khuych i ca b iu khin, K D l h s o hm ca b iu khin, KI l h s tớch phõn v s l toỏn t iu khin cho mt t ta cn cú mch iu khin theo hai phng x v y, vy ta cú mụ hỡnh iu khin tng quỏt cú dng ... Xỏc nh lut iu khin : u = K x Hỡnh 2: H thng iu khin vũng kớn s dng b iu khin phn hi u LQG 27 4.2 Tng hp b iu khin da trờn phng phỏp phn hi u cho h thng AMB DOF 4.2.1 Kim tra tớnh iu khin c 4.2.2...
Ngày tải lên: 15/08/2015, 15:49

Tính điều khiển được hoàn toàn của hệ thống tuyến tính qua một cách tiếp cận hình học
... hệ khác Định lí ta có cách kiểm tra tính điều khi n hoàn toàn [3], không nhắc đến Cr (Ω) Cb (Ω) Hệ Cho Ω tập tùy ý với ∈ coΩ Hệ (A, Ω) điều khi n hoàn toàn (a) (A, Ω) điều khi n địa phương; (b)3 ... từ (4) ta giả thiết mà không làm tính tổng quát lim uk = ∞ k→∞ uk > với k Khi ∈ coΩ, ta có vk := uk / uk ∈ coΩ Lấy v0 điểm tụ vk Khi đó, v0 ∈ Cr (coΩ) (theo Định lí 8.2 [4]) Nói cách khác, từ ... Cr (R) ∩ (−Cr (R)) Khi đó, L không gian lớn chứa Cr (R) vậy, không gian điều khi n lớn (A, Ω), từ tính chất (ii) nón lùi Khi ∈ Ω, ta kiểm tra rằng, với t ≥ 0, e−At R ⊂ R, (6) từ kéo theo, theo...
Ngày tải lên: 29/06/2014, 22:55

Báo cáo đồ án trí tuệ nhân tạo: Xây dựng chương trình mô tả không gian trạng thái của toán chiếc balô loại 2 giải quyết theo giải thuật Gene với phương pháp chọn Rank
... (population) tiến hóa từ hệ tới hệ khác phụ thuộc vào thích nghi cá thể Thế hệ sinh chứa lời giải toán • Giải thuật: - Khởi tạo quần thể P(0) - số i hệ thứ i - Lặp đến quần thể hội tụ đạt đến tiêu chuẩn ... rank selection + steady state selection + Elitism d Mã hóa Mã hóa chuỗi gene cá thể thành dạng thích hợp (nhị phân, mã hóa giá trị, mã hóa hoán vị) e Lai ghép Sau chọn cặp NST dùng để lai, ta ... Lặp đến đủ số cá thể Lấy ngẫu nhiên số thuộc khoảng (1; tổng Rank) Cộng Rank đến đc giá trị > giá trị ngẫu nhiên Xác định Gene chọn đưa vào mảng để lai * Mã hóa: Với Gene chọn để đem lai, mã hóa...
Ngày tải lên: 25/03/2014, 22:03

Báo cáo đồ án trí tuệ nhân tạo: Mô tả không gian trạng thái bài toán người đưa thư (Travelling Saleman Problem – PST) và dùng giải thuật Local Search để giải quyết
... cần giao hàng n thành phố Xuất phát từ thành phố đó, qua thành phố khác để giao hàng trở thành phố ban đầu Mỗi thành phố đến lần, khoảng cách từ thành phố đến thành phố khác xác định Hãy tìm ... thay đổi không đáng kể V- Thuật toán: Thuật toán sử dụng chương trình Local Search Theo sau điểm xuất phát xác định thuật toán tìm điểm có đường tiếp chọn đường ngắn Cho đến hết tất thành phố ... - Khởi tạo số thành phố - Khai báo mảng chiều a(i, j) để lưu khoảng cách thành phố với i j số thành phố - Nhập liệu (khoảng cách) cho mảng - Chọn điểm xuất phát s - Xét giá trị mảng a(s, j): •...
Ngày tải lên: 25/03/2014, 22:18

DẠNG CHÍNH tắc của mô HÌNH KHÔNG GIAN TRẠNG THÁI
... s^3 + 10 s^2 + 31 s + 30 2 .Từ hàm truyền vừa thiết lập xác định mô hình KGTT hệ thống So sánh ma trận A, B, C, D vừa tìm với ma trận A, B, C, D cho (bằng cách dùng lệnh tf(sys), với sys ... phải ma trận, dạng tắc đường chéo phần tử nằm đường chéo matran 4.Hãy tìm dạng tắc điều khi n hệ thống từ dạng tắc quan sát >> A2=[0 -30;1 -31;0 -10] A2 = 0 -30 -31 -10 >> B2=[1;0;0] B2 = 0 >> ... tf(sys), với sys mô hình KGTT hệ thống) Nếu khác, kiểm tra lại việc xác định hàm truyền hệ thống từ ma trận A, B, C, D vừa tìm >> [A1,B1,C1,D1]=tf2ss(num,den) A1 = -10 -31 -30 0 B1 = 0 C1 = -0.0000...
Ngày tải lên: 16/10/2015, 10:27

THIẾT lập mô HÌNH KHÔNG GIAN TRẠNG THÁI
... hình KGTT từ hàm truyền vừa thiết lập: >> sys_ss=ss(G) a= x1 x2 x3 x1 -8 -1 -0.5 x2 16 0 x3 b= u1 x1 x2 x3 c= x1 y1 d= u1 x2 x3 0.25 0.09375 y1 d.Tìm ma trận A, B, C, D mô hình KGTT từ véctơ hệ ... 0.09375 y1 d.Tìm ma trận A, B, C, D mô hình KGTT từ véctơ hệ số tử mẫu hàm truyền T(s) Kiểm tra lại cách áp dụng công thức: H ( s ) = C ( sI − A ) B + D = −1 det ( sI − A + BC ) − det ( sI − A ) +D ... xác định >> step(GT) g.Trong simulink, vẽ sơ đồ khối chi tiết mô hình không gian biến trạng thái từ hệ phương trình trạng thái hệ hồi tiếp vừa chọn Mô hiển thị đáp ứng step mô hình So sánh với...
Ngày tải lên: 16/10/2015, 10:36

Báo cáo đồ án trí tuệ nhân tạo: Mô tả không gian trạng thái trò chơi cờ tướng theo giải thuật minimax
... trình: I) Giao diện: II) Các hàm sử dụng chương trình: Mỗi quân cờ ta phải lưu tọa độ, tên màu sắc quân cờ Ở em sử dụng mảng Bàn Cờ để lưu quân cờ với thuộc tính Các quân cờ đến điểm bàn cờ Muốn ... bàn cờ, hàm KiemTra tính toán khoảng cách tọa độ chuột tọa độ điểm gần Nếu khoảng cách điểm với tọa độ chuột nhỏ bán kính quân cờ di chuyển quân cờ vị trí Khi ăn quân cờ, bắt buộc ta phải xóa ... ta phải xét xem bước dịch chuyển đến điểm đích có quân cờ không? Nếu có Hàm trả false Tương tự xuống, sang trái sang phải Nếu có quân cờ điểm cần di chuyển điểm đến lúc hình xuất thông báo: Xét...
Ngày tải lên: 25/03/2014, 22:26

Báo cáo nghiên cứu khoa học " Thiết lập bộ mô hình mô phỏng phục vụ xây dựng quy trình vận hành hệ thống liên hồ chứa thủy điện trên lƣu vực sông Ba " docx
... nhánh đoạn sông từ Ayun Hạ đến Củng Sơn đƣợc mô hình hóa mô hình Muskingum dòng sông Mô hình thủy lực Muskingum có vai trò dẫn nƣớc thu gom lƣợng nƣớc gia nhập khu suốt đoạn đƣờng từ thƣợng lƣu ... 136-150 Khi lũ lên xả lƣu lƣợng đến, giữ hồ MNTL Căn vào dự báo thủy văn xác định giá trị đỉnh lũ, lƣu lƣợng đến lƣu lƣợng Qcắt lũ (quy định bảng 3) chuyển sang điều tiết cắt lũ Cắt lũ cách xả ... xả lƣu lƣợng lƣu lƣợng xả cuối bƣớc Tích nƣớc đến MNDBT Khi mực nƣớc hồ MNDBT tiếp tục xả lũ lƣu lƣợng đến mở hết cửa xả để giữ mực nƣớc hồ MNDBT Khi mở hết cửa xả mà lũ lên vận hành an toàn hồ,...
Ngày tải lên: 20/06/2014, 00:20

MÔ HÌNH TOÁN HỌC HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC
... tử ỉ ỉ ỉ Cách tìm hàm truyền Bước 1: Thành lập phương trình vi phân mô tả quan hệ vào – phần tử cách: Ø Áp dụng đònh luật Kirchoff, quan hệ dòng–áp điện trở, tụ điện, cuộn cảm,… phần tử điện Ø ... 22 Hàm truyền đối tượng thường gặp Hàm truyền động DC Lư : điện cảm phần ứng Rư : điện trở phần ứng : điện áp phần ứng : sức phản điện động 26 September 2006 : tốc độ động Mt : moment tải B ... truyền cần tìm Chú ý: mạch điện tìm hàm truyền theo phương pháp tổng trở phức 26 September 2006 © H T Hồng - ÐHBK TPHCM 18 Hàm truyền điều khi n (khâu hiệu chỉnh) Các khâu hiệu chỉnh thụ động...
Ngày tải lên: 14/10/2013, 16:29

Tài liệu MÔ HÌNH TOÁN HỌC HỆ THỐNG ĐỊNH VỊ ĐỘNG HỌC TÀU THỦY pdf
... Cách biểu diễn giả thiết (lực mômen gió thay đổi chậm) nhiễu gió bù hoàn hảo cách áp dụng công thức gió bù tw từ biểu thức ( – 36 ) Vì vậy, ta viết lại ( – 45 ) ( – 46 ) theo: Mục tiêu điều khi n ... điều khi n tối ưu với việc bù gió mạch thẳng Các nhiễu LF khác không bao gồm mô hình điều khi n chúng bù tác động điều khi n tích phân Xét mô hình điều khi n toàn phương tuyến tính (LQ): với giả ... luật điều khi n Ngoài ra, việc đo sóng nên sử dụng để điều khi n bù mạch thẳng 7.1 Điều khi n phản hồi tối ưu toàn phương với việc bù tác động gió mạch thẳng: Ta thiết kế quy luật điều khi n tối...
Ngày tải lên: 14/12/2013, 01:17

LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG - CHƯƠNG 2 MÔ HÌNH TOÁN HỌC - HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC doc
... tử ỉ ỉ ỉ Cách tìm hàm truyền Bước 1: Thành lập phương trình vi phân mô tả quan hệ vào – phần tử cách: Ø Áp dụng đònh luật Kirchoff, quan hệ dòng–áp điện trở, tụ điện, cuộn cảm,… phần tử điện Ø ... 22 Hàm truyền đối tượng thường gặp Hàm truyền động DC Lư : điện cảm phần ứng Rư : điện trở phần ứng : điện áp phần ứng : sức phản điện động February 2006 : tốc độ động Mt : moment tải B : hệ ... hàm truyền cần tìm Chú ý: mạch điện tìm hàm truyền theo phương pháp tổng trở phức February 2006 © H T Hồng - ÐHBK TPHCM 18 Hàm truyền điều khi n (khâu hiệu chỉnh) Các khâu hiệu chỉnh thụ động ỉ...
Ngày tải lên: 26/07/2014, 06:21

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 1 doc
... HÌNH TOÁN HỌC HỆ THỐNG ĐIỀU KHI N LIÊN TỤC 26 September 2006 © H T Hồng - ÐHBK TPHCM Nội dung chương Khái niệm mô hình toán học Hàm truyền Phép biến đổi Laplace Đònh nghóa hàm truyền Hàm truyền ... động Đại số sơ đồ khối Sơ đồ dòng tín hiệu Phương trình trạng thái (PTTT) Khái niệm PTTT Cách thành lập PTTT từ phương trình vi phân Quan hệ PTTT hàm truyền 26 September 2006 © H T Hồng - ÐHBK TPHCM ... ÐHBK TPHCM Khái niệm mô hình toán học Hệ thống điều khi n thực tế đa dạng có chất vật lý khác Cần có sở chung để phân tích, thiết kế hệ thống điều khi n có chất vật lý khác Cơ sở toán học Quan hệ...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 2 pdf
... phần tử Cách tìm hàm truyền Bước 1: Thành lập phương trình vi phân mô tả quan hệ vào – phần tử cách: Áp dụng đònh luật Kirchoff, quan hệ dòng–áp điện trở, tụ điện, cuộn cảm,… phần tử điện Áp ... học thuộc biến đổi Laplace hàm Các hàm khác tra BẢNG BIẾN ĐỔI LAPLACE phụ lục sách Lý thuyết Điều khi n tự động 26 September 2006 © H T Hồng - ÐHBK TPHCM 15 Đònh nghóa hàm truyền Xét hệ thống mô ... truyền cần tìm Chú ý: mạch điện tìm hàm truyền theo phương pháp tổng trở phức 26 September 2006 © H T Hồng - ÐHBK TPHCM 18 Hàm truyền điều khi n (khâu hiệu chỉnh) Các khâu hiệu chỉnh thụ động...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 3 pps
... Hàm truyền đối tượng thường gặp Hàm truyền động DC − Lư : điện cảm phần ứng − Rư : điện trở phần ứng − : điện áp phần ứng − : sức phản điện động 26 September 2006 − ω : tốc độ động − Mt : moment ... (tt) Áp dụng đònh luật Kirchoff cho mạch điện phần ứng: diư (t ) + (t ) U (t ) = iư (t ).Rư + Lư dt (t ) = KΦω (t ) đó: (1) (2) K : hệ số Φ : từ thông kích từ Áp dụng đònh luật Newton cho chuyển ... ) = M t ( s ) + Bω ( s ) + Jsω ( s ) Đặt: (5) (8) Lư Tư = Rư J Tc = B số thời gian điện từ động số thời gian điện động © H T Hồng - ÐHBK TPHCM 25 Hàm truyền đối tượng thường gặp (tt) Hàm truyền...
Ngày tải lên: 07/08/2014, 23:24

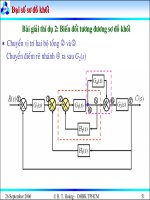
Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 4 docx
... tương đương theo thứ tự từ Hai sơ đồ khối gọi tương đương hai sơ đồ khối có quan hệ tín hiệu vào tín hiệu 26 September 2006 © H T Hồng - ÐHBK TPHCM 39 Đại số sơ đồ khối Các phép biến đổi tương ... nhiệt độ lò thay đổi tầm c(t) = 0÷5000C, cảm biến nhiệt biến đổi thay đổi nhiệt độ thành thay đổi điện áp tầm cht(t) 0÷5V, hàm truyền cảm biến là: H ( s ) = K ht = 0.01 Nếu cảm biến có trể, hàm ... - ÐHBK TPHCM 39 Đại số sơ đồ khối Các phép biến đổi tương đương sơ đồ khối Chuyển điểm rẽ nhánh từ phía trước phía sau khối: 26 September 2006 © H T Hồng - ÐHBK TPHCM 40 ...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 5 potx
... Đại số sơ đồ khối Các phép biến đổi tương đương sơ đồ khối Chuyển tổng từ phía trước phía sau khối: 26 September 2006 © H T Hồng - ÐHBK TPHCM 42 Đại số sơ đồ khối Các phép biến đổi tương ... phép biến đổi tương đương sơ đồ khối Chuyển tổng từ phía sau phía trước khối: 26 September 2006 © H T Hồng - ÐHBK TPHCM 43 Đại số sơ đồ khối Các phép biến đổi tương đương sơ đồ khối Chuyển vò ... đồ khối Chuyển vò trí hai tổng: 26 September 2006 © H T Hồng - ÐHBK TPHCM 44 Đại số sơ đồ khối Các phép biến đổi tương đương sơ đồ khối Tách tổng thành tổng : 26 September 2006 © H T Hồng - ÐHBK...
Ngày tải lên: 07/08/2014, 23:24
Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 6 pps
... biến đổi sơ đồ khối không mang tính hệ thống, sơ đồ cụ thể có nhiều cách biến đổi khác nhau, tùy theo trực giác người giải toán Khi tính hàm truyền tương đương ta phải thực nhiều phép tính phân ... giản Đối với hệ thống phức tạp ta có phương pháp hiệu hơn, phương pháp sơ đồ dòng tín hiệu đề cập đến mục 26 September 2006 © H T Hồng - ÐHBK TPHCM 60 ...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 7 pot
... Sơ đồ dòng tín hiệu Đònh nghóa (tt) Đường tiến: đường gồm nhánh liên tiếp có hướng tín hiệu từ nút nguồn đến nút đích qua nút lần Độ lợi đường tiến tích hàm truyền ... 2006 © H T Hồng - ÐHBK TPHCM 62 Sơ đồ dòng tín hiệu Công thức Mason Hàm truyền tương đương từ nút nguồn đến nút đích hệ thống tự động biểu diễn sơ đồ dòng tín hiệu cho bởi: G = ∑ ∆ k Pk ∆ k 26 ... đồ dòng tín hiệu Thí dụ (tt) Đònh thức sơ đồ dòng tín hiệu: ∆ = − ( L1 + L2 + L3 + L4 ) + L1L2 Các đònh thức con: ∆1 = ∆2 = ∆ = − L1 Hàm truyền tương đương hệ thống: Gtd = ( P ∆1 + P2 ∆ + P3∆...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 8 potx
... thí dụ phương trình trạng thái Thí dụ 2: Động DC − Lư : điện cảm phần ứng − Rư : điện trở phần ứng − : điện áp phần ứng − : sức phản điện động 26 September 2006 − ω : tốc độ động − Mt : moment ... (tt) Áp dụng đònh luật Kirchoff cho mạch điện phần ứng: diư (t ) + (t ) U (t ) = iư (t ).Rư + Lư dt đó: (t ) = KΦω (t ) (1) (2) K : hệ số Φ : từ thông kích từ Áp dụng đònh luật Newton cho chuyển ... KΦ − Lư B − J 1 B = Lư 0 © H T Hồng - ÐHBK TPHCM C = [0 1] 79 Cách thành lập PTTT từ PTVP Trường hợp 1: Vế phải PTVP không chứa đạo hàm tín hiệu vào Hệ thống mô tả PTVP...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 9 pps
... n−1 βn C = [1 K 0] 26 September 2006 © H T Hồng - ÐHBK TPHCM 84 Cách thành lập PTTT từ PTVP Trường hợp (tt) Các hệ số β vector B xác đònh sau: b0 β1 = a0 b1 − a1β1 β2 = a0 b2 − a1β − ... © H T Hồng - ÐHBK TPHCM β1 B = β β3 C = [1 0] 86 Cách thành lập PTTT từ PTVP Thí dụ trường hợp (tt) Các hệ số vector B xác đònh sau: b0 β1 = a = = 0 b − a β 10 − × ... vào: & xn (t ) = xn−1 (t ) − β n−1r (t ) 26 September 2006 © H T Hồng - ÐHBK TPHCM 83 Cách thành lập PTTT từ PTVP Trường hợp (tt) Phương trình trạng thái: & x(t ) = Ax(t ) + Br (t ) c(t )...
Ngày tải lên: 07/08/2014, 23:24