Thiết kế bộ điều khiển giám sát hệ thống mức két dựa trên giải thuật fuzzy PID
59
3
0
THÔNG TIN TÀI LIỆU
Thông tin cơ bản
| Tiêu đề | Thiết kế bộ điều khiển giám sát hệ thống mức két dựa trên giải thuật Fuzzy-PID |
|---|---|
| Tác giả | Nguyễn Minh Hiếu |
| Người hướng dẫn | PTS. Ngô Thanh Quyền |
| Trường học | Đại học Công nghiệp Thành phố Hồ Chí Minh |
| Chuyên ngành | Công nghệ Điện |
| Thể loại | Đề tài nghiên cứu khoa học cấp trường |
| Năm xuất bản | 2018 |
| Thành phố | Thành phố Hồ Chí Minh |
| Định dạng | |
|---|---|
| Số trang | 59 |
| Dung lượng | 2,49 MB |
Nội dung
Ngày đăng: 30/11/2022, 22:41
Nguồn tham khảo
| Tài liệu tham khảo | Loại | Chi tiết | ||
|---|---|---|---|---|
| [2] Fuzzy CMAC Control for MIMO Nonlinear Systems, C. M. Lin, Senior Member, IEEE, T. Y. Chen, C. H. Chen, and F. S. Ding | Sách, tạp chí |
|
||
| [8] The Tracking Control Design of Adaptive Fuzzy CMAC for an Omni- Directional Mobile Robot, Ter-Feng Wu, Hsu-Chih Huang, Pu-Sheng Tsai, Nien-Tsu Hu, and Zhi-Qiang Yang | Sách, tạp chí |
|
||
| [1] LabVIEW MathScript, University College of Southeast Norway | Khác | |||
| [3] Adaptive Dynamic Sliding-Mode Fuzzy CMAC for Voice Coil Motor Using Asymmetric Gaussian Membership Function, Chih-Min Lin, Hsin-Yi Li | Khác | |||
| [4] Điều khiển WCMAC tự tổ chức cho cánh tay Robot làm sạch bình ngưng , Dr. Ngô Thanh Quyền, Châu Minh Quang | Khác | |||
| [5] Lý thuyết điều khiển mờ, Phân Xuân Minh, Nguyễn Doãn Phước | Khác | |||
| [6] Lý Thuyết Điều khiển Tự Động - Ths.Huỳnh Thái Hoàng NXB ĐH Quốc Gia | Khác |
HÌNH ẢNH LIÊN QUAN





























TRÍCH ĐOẠN
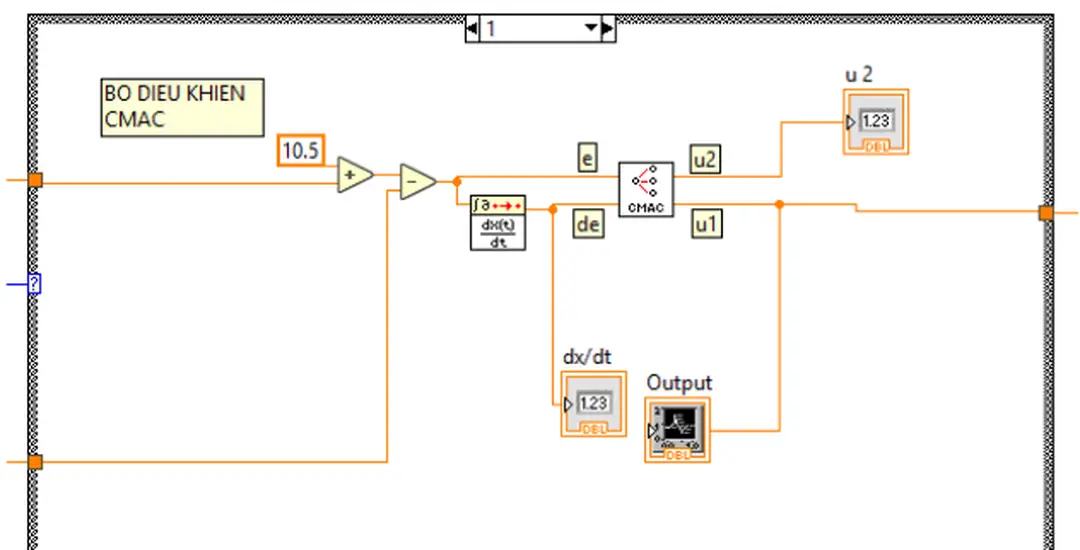
Bộ điều khiển liên kết mơ hình tiểu não (CMAC)
Thiết kế bộ điều khiển mơ hình tiểu não (CMAC)
Hướng dẫn điều khiển
TÀI LIỆU CÙNG NGƯỜI DÙNG
-
71 24 0
-
162 2 0
-
60 6 0
-
114 4 0
-
105 11 0
-
88 0 0
TÀI LIỆU LIÊN QUAN
-
59 25 0
-
28 1 0
-
59 3 0
-
59 382 1
-
94 416 0
-
43 158 0
-
43 119 0
-
69 25 1