ĐẠI HỌC ĐÀ NẴNG TRƯỜNG ĐẠI HỌC BÁCH KHOA KHOA ĐIỆN DỰ ÁN LIÊN MÔN KỸ THUẬT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA (PBL2) ĐỀ TÀI THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN VÀ GIÁM SÁT TỐC ĐỘ ĐỘNG CƠ ĐIỆN Người hướng dẫn TS GIÁP.
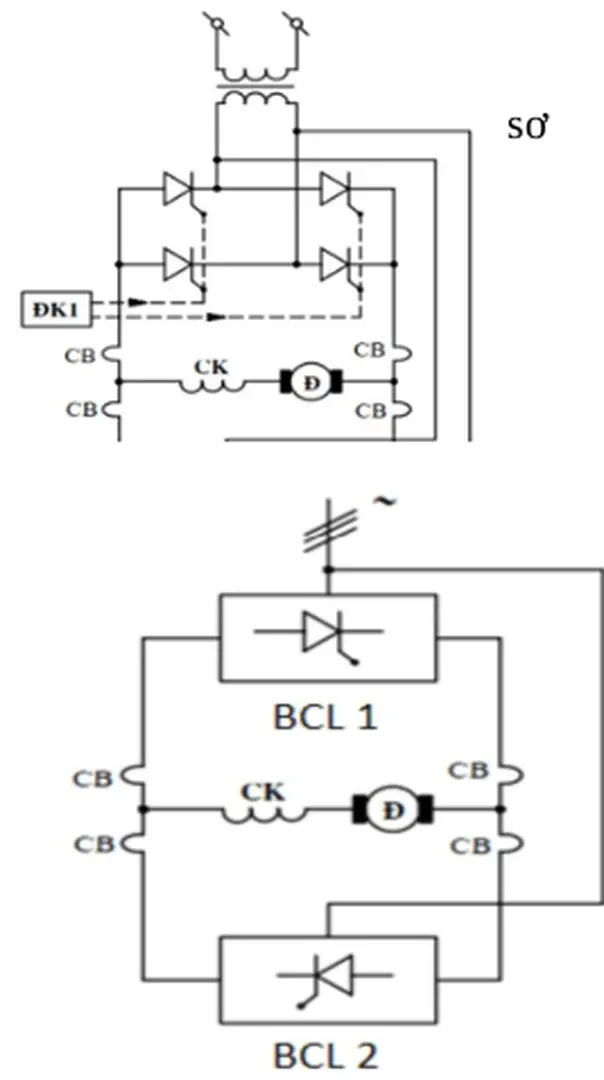
ĐẠI HỌC ĐÀ NẴNG TRƯỜNG ĐẠI HỌC BÁCH KHOA KHOA ĐIỆN DỰ ÁN LIÊN MÔN KỸ THUẬT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA (PBL2) ĐỀ TÀI: THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN VÀ GIÁM SÁT TỐC ĐỘ ĐỘNG CƠ ĐIỆN Người hướng dẫn: TS GIÁP QUANG HUY HÀ GIA CHÍNH Sinh viên thực hiện: TRẦN TRUNG HIẾU NGUYỄN TRUNG HẬU NGUYỄN QUANG TIẾN NGUYỄN HỮU TẤN TRẦN QUỐC BẢO Nhóm HP / Lớp: 19.32B Ngành: KỸ THUẬT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA TỰ ĐỘNG HÓA Sinh viên thực hiện: Nhóm Hướng dẫn: TS Giáp Quang Huy LỜI NĨI ĐẦU Trong suốt q trình thực Đồ án, gặp phải nhiều khó khăn giúp đỡ, hỗ trợ kịp thời từ quý Thầy Cô bạn nên Đồ án hoàn thành tiến độ Em xin chân thành cảm ơn thầy tận tình hướng dẫn, bảo kinh nghiệm quý báu Mặc dù nhóm thực cố gắng hồn thiện đồ án, q trình soạn thảo kiến thức cịn hạn chế nên cịn nhiều thiếu sót Nhóm thực mong nhận đóng góp ý kiến q thầy bạn sinh viên Sau nhóm thực xin chúc Thầy cô sức khoẻ, thành công tiếp tục đào tạo sinh viên giỏi đóng góp cho đất nước Chúc bạn sức khỏe, học tập thật tốt để không phụ công lao Thầy Cô giảng dạy Nhóm thực xin chân thành cảm ơn Trân trọng Sinh viên thực hiện: Nhóm Hướng dẫn: TS Giáp Quang Huy MỤC LỤC DANH SÁCH HÌNH ẢNH CHƯƠNG 1: TỔNG QUAN VỀ HỆ THÔNG, THIẾT KẾ VÀ TÍNH TỐN PHẦN ĐỘNG LỰC 1.1 Tính tốn cấu truyền động 1.1.1 Mơ hình truyền động băng tải .7 1.1.2 Tốc Độ Yêu Cầu Của Băng Tải 1.1.3 Tính tốn đặc tính tải yêu cầu .8 1.2 Tổng quan động điện chiều 11 1.2.1 Cấu tạo động điện chiều 11 1.2.2 Các phương trình đặc tính động điện chiều kích từ độc lập 12 1.2.3 Điều chỉnh tốc độ cách thay đổi điện áp phần ứng 13 1.3 Chọn động 13 CHƯƠNG 2: TÍNH TỐN MẠCH ĐIỆN TỬ CƠNG SUẤT .15 2.1 Bộ chỉnh lưu cầu kép pha điều khiển hoàn toàn 15 2.1.1 Chỉnh lưu cầu pha điều khiển hoàn toàn 15 2.1.2 Phương pháp điều khiển 16 2.1.3 Nguyên tắt thẳng đứng tuyến tính .17 2.1.4 Bộ chỉnh lưu cầu kép pha điều khiển hồn tồn .17 2.2 Tính toán mạch động lực 20 2.2.1 Tính chọn Thyristor 20 2.2.2 Bảo vệ điện áp cho van .22 2.2.3 Mạch lọc 22 CHƯƠNG 3: TÍNH CHỌN PHẦN ĐO LƯỜNG, BỘ ĐIỀU KHIỂN VÀ SƠ ĐỒ MẠCH PHẦN CỨNG TOÀN HỆ THỐNG .23 3.1 Tính chọn linh kiện 23 3.1.1 Arduino Nano 23 Sinh viên thực hiện: Nhóm Hướng dẫn: TS Giáp Quang Huy 3.1.2 Cảm biến đo dòng điện ACS712 .24 3.1.3 Cảm biến tốc độ IR-FC03 26 3.2 Sơ đồ mạch phần cứng nguyên lý hoạt động .27 3.2.1 Sơ đồ mạch nguồn .27 3.2.2 Sơ đồ mạch đồng so sánh 27 3.2.3 Sơ đồ mạch điều khiển xung kích SCR .28 3.2.4 Sơ đồ mạch cầu kép pha điều khiển hoàn toàn 29 3.2.5 Sơ đồ mạch điều khiển hiển thị 29 CHƯƠNG 4: THIẾT KẾ, TỔNG HỢP PHẦN ĐIỀU KHIỂN .30 4.1 Xây dựng mơ hình tốn học .30 4.1.1 Mơ hình tốn học động 30 4.1.2 Mơ hình tốn học cảm biến 31 4.1.3 Mơ hình tốn học chỉnh lưu 31 4.1.4 Mơ hình tốn học hệ thống truyền động điện 32 4.1.5 Tổng hợp mạch vòng dòng điện 32 4.1.6 Tổng hợp mạch vòng tốc độ 33 CHƯƠNG 5: MÔ PHỎNG, ĐÁNH GIÁ KẾT QUẢ TRÊN MATLAB SIMULINK 35 5.1 Mô dạng hàm truyền .35 5.1.1 Mô Matlab Simulink .35 5.2 Mô mạch nguyên lý Simulink 36 5.2.1 Khâu điều khiển 36 5.2.2 Khâu đồng 36 5.2.3 Khâu chỉnh lưu cầu kép .37 5.2.4 Mạch mô 38 5.2.5 Kết mô .38 5.3 Nhận xét 39 KẾT LUẬN CHUNG .40 Sinh viên thực hiện: Nhóm 5 Hướng dẫn: TS Giáp Quang Huy TÀI LIỆU THAM KHẢO 41 DANH SÁCH HÌNH ẢNH Hình 1.1 Băng tải kéo vật m Hình 1.2 Tốc độ yêu cầu băng tải Hình 1.3 Đồ thị tốc độ góc theo thời gian .9 Hình 1.4 Đồ thị momen xoắn Hình 1.5 Đồ thị cơng suất động 10 Hình 1.6 Cấu tạo động điện chiều 11 Hình 1.7 Sơ đồ nối dây động kích từ độc lập 12 Hình 1.8 Đặc tính - điện động 12 Hình 1.9 Đặc tính động .12 Hình 1.10 Đặc tính thay đổi Uư 13 Hình 1.11 Động motor crouzet 80807018 14 Hình 1.12 Thơng số độ lớn động 14 Hình 2.1 Chỉnh lưu cầu pha hồn tồn 15 Hình 2.2 Sơ đồ chỉnh lưu cầu pha kép điều khiển hồn tồn 17 Hình 2.3 Sơ đồ hai chỉnh lưu mắc song song ngược 18 Hình 2.4 Giản đồ dịng điện điều khiển đảo chiều tuyến tính phụ thuộc .19 Hình 2.5 Mạch R-C bảo vệ điện áp chuyển mạch 22 Hình 2.6 Dạng điện áp sau qua lọc 22 Hình 3.1 Cảm biến đo dòng điện ACS712 25 Hình 3.2 Sơ đồ chân IR FC-03 .26 Hình 3.3 Sơ đồ nguyên lý mạch nguồn .27 Hình 3.4 Sơ đồ mạch đồng so sánh 27 Hình 3.5 Sơ đồ mạch điều khiển xung kích SCR 28 Hình 3.6 Sơ đồ mạch cầu kép pha 28 Hình 3.7 Sơ đồ mạch điều khiển hiển thị 29 Sinh viên thực hiện: Nhóm Hướng dẫn: TS Giáp Quang Huy Hình 5.1 Sơ đồ mạch mô hàm truyền .35 Hình 5.2 Đồ thị tốc đồ đặt 35 Hình 5.3 Đồ thị tốc độ đầu 35 Hình 5.4 Sơ đồ mơ khâu điều khiển 36 Hình 5.5 Sơ đồ mô khâu đồng .36 Hình 5.6 Kết đầu khâu đồng 37 Hình 5.7 Sơ đồ mạch chỉnh lưu cầu kép 37 Hình 5.8 Sơ đồ mạch mô điều khiển động cầu kép .38 Hình 5.9 Đồ thị tốc độ đặt mong muốn .38 Hình 5.10 Đồ thị tốc độ, mo-men, dòng điện động 39 Sinh viên thực hiện: Nhóm Hướng dẫn: TS Giáp Quang Huy CHƯƠNG 1: TỔNG QUAN VỀ HỆ THÔNG, THIẾT KẾ VÀ TÍNH TỐN PHẦN ĐỘNG LỰC 1.1 Tính tốn cấu truyền động 1.1.1 Mơ hình truyền động băng tải Hình 1.1 Băng tải kéo vật m Chọn tải băng chuyền: Bánh răng: - Con lăn tải: R=Ø 0.1 m Tải: - Khối lượng băng chuyền: kg - Khối lượng tải: Tổng khối lượng: 1.1.2 Tốc Độ Yêu Cầu Của Băng Tải Băng tải chuyển động với tốc độ dự tính Hình 1 gồm giai đoạn tăng tốc, ổn định, đảo chiều giảm tốc Chọn tốc độ ổn định dự tính m/s Thời gian dự tính cho giai đoạn chuyển đổi: - Tăng tốc 2s Ổn định 8s Đảo chiều 2s Giảm tốc 2s Đồ thị: Sinh viên thực hiện: Nhóm Hướng dẫn: TS Giáp Quang Huy Hình 1.2 Tốc độ yêu cầu băng tải 1.1.3 Tính tốn đặc tính tải u cầu 1.1.3.1 Tốc độ góc: - Với Tại Tại - Với - Với Tại Tại Tại - Với - Với Tại Tại Độ Thị Tốc độ: Sinh viên thực hiện: Nhóm Hướng dẫn: TS Giáp Quang Huy Hình 1.3 Đồ thị tốc độ góc theo thời gian 1.1.3.2 Momen xoắn tính tốn: Nếu bỏ qua momen qn tính động lực cản , ta được: - Với Với Với Với Với Đồ thị: tt Hình 1.4 Đồ thị momen xoắn Momen xoắn đẳng trị: Chọn hệ số an toàn: Sinh viên thực hiện: Nhóm 10 Hướng dẫn: TS Giáp Quang Huy Hình 3.20 Sơ đồ chân IR FC-03 3.1.3.2 Thông số kĩ thuật cảm biến tốc độ IR-FC03 Thơng số IC Điện áp hoạt động Tín hiệu trả Chiều rộng rãnh Kích thước Giá trị LM393 3.3V – 5VDC Analog (A0)/ Digital (D0) 5mm 32 x 14mm 3.1.3.3 Cách sử dụng cảm biến tốc độ IR-FC03 Khi motor quay đĩa encoder quay, lúc giá trị chân DO FC-03 chuyển đổi liên tục từ LOW sang HIGH từ HIGH sang LOW Nguyên nhân FC-03 cấp điện, diode chân số ITR9608 phát tia hồng ngoại, tia hồng ngoại truyền thông qua lỗ đĩa encoder, phototransistor nhận tín hiệu chuyển output chân DO lên mức HIGH Ngược lại, tia hồng ngoại bị cản đĩa encoder, phototransistor khơng nhận tín hiệu, chân DO chuyển mức LOW 3.2 Sơ đồ mạch phần cứng nguyên lý hoạt động 3.2.1 Sơ đồ mạch nguồn Hình 3.21 Sơ đồ nguyên lý mạch nguồn Sinh viên thực hiện: Nhóm 27 Hướng dẫn: TS Giáp Quang Huy Sử dụng biến áp chuyển từ 220VAC xuống 12VAC sau qua mạch cầu diode để chuyển từ điện áp 12VAC sang điện áp 12VDC ic7812 chuyển 12VDC xuống 5VDC Module 2596 3.2.2 Sơ đồ mạch đồng so sánh Hình 3.22 Sơ đồ mạch đồng so sánh Khâu đồng bộ: - Đảm bảo quan hệ góc pha, cố định với điện áp van lực nhằm xác định điểm gốc để tính góc điều khiển α - Chuyển đổi điện áp lực thường có giá trị cao sang giá trị phù hợp với mạch điều khiển, thường điện áp thấp, theo qui chuẩn an toàn 36V - Cách ly hoàn toàn điện mạch điều khiển với mạch lực Đảm bảo an toàn cho người sử dụng linh kiện điều khiển Khâu so sánh: So sánh điện áp đồng điện áp điều khiển phát tín hiệu xung vng ngõ khối so sánh Xung chùm kết hợp với ngõ khâu so sánh đưa tới khâu AND để tạo chùm xung liên tục từ lúc kích mở đến hết bán kì Sinh viên thực hiện: Nhóm 28 Hướng dẫn: TS Giáp Quang Huy 3.2.3 Sơ đồ mạch điều khiển xung kích SCR Hình 3.23 Sơ đồ mạch điều khiển xung kích SCR Chức năng: Khuếch đại xung Cách ly mạch động lực mạch điều khiển Tạo sườn dốc cho xung Phối hợp trở kháng đầu vào Thyristor 3.2.4 Sơ đồ mạch cầu kép pha điều khiển hồn tồn Hình 3.24 Sơ đồ mạch cầu kép pha Xây dựng sơ đồ nguyên lý dựa theo lý thuyết có Sinh viên thực hiện: Nhóm 29 Hướng dẫn: TS Giáp Quang Huy 3.2.5 Sơ đồ mạch điều khiển hiển thị Hình 3.25 Sơ đồ mạch điều khiển hiển thị Sử dụng nút nhấn để cài đặt tín hiệu đầu vào start, stop, tăng, giảm tốc độ đảo chiều động Dùng LCD 16x2 để hiển thị thông số trạng thái hoạt động hệ thống Dùng Arduino Nano để lập trình điều khiển, đọc xuất tín hiệu CHƯƠNG 4: THIẾT KẾ, TỔNG HỢP PHẦN ĐIỀU KHIỂN 4.1 Xây dựng mơ hình tốn học 4.1.1 Mơ hình tốn học động Phương trình điện áp phần ứng điện áp đưa vào động suất điện động cảm ứng rotor , điện cảm, điện trở mạch phần ứng Sinh viên thực hiện: Nhóm 30 Hướng dẫn: TS Giáp Quang Huy Phương trình mơ men điện từ Suất điện động cảm ứng động Phương trình mơ tả quan hệ điện-cơ tốc độ góc momen điện từ động sinh momen cản tải đặt lên trục động số momen qn tính lực tác động bên ngồi ma sát, khơng khí Mơ hình tốn động Biến đổi sơ đồ khối đưa dạng: Sinh viên thực hiện: Nhóm 31 Hướng dẫn: TS Giáp Quang Huy 4.1.2 Mơ hình tốn học cảm biến Phản hồi dịng điện Mơ hình tốn học phản hồi dịng điện biểu diễn hệ số khuếch đại Trong đa số trường hợp không yêu cầu có lọc Trong trường hợp cần dùng lọc, lọc thông thấp sử dụng Hằng số thời gian lọc thường nhỏ 1ms Phản hồi tốc độ Trong hệ thống trước thường dùng máy phát tốc để đo tốc độ Một lọc thơng thấp có số thời gian 10ms thường sử dụng Hàm truyền đạt khâu phản hồi tốc độ: hệ số khuếch đại cảm biến số thời gian lọc 4.1.3 Mơ hình tốn học chỉnh lưu Bộ chỉnh lưu ta xem khâu khuếch đại: Trong điện áp điều khiển biến đổi 4.1.4 Mơ hình tốn học hệ thống truyền động điện Trong Gcs(s) hàm truyền đạt điều khiển tốc độ, Gcc(s) hàm truyền đạt điều khiển dòng điện Trong sơ đồ khối mơ hình tốn học hệ thấy suất điện động xem nhiễu vịng dịng điện Đối với động cơng suất trung bình lớn thành phần suất điện động bỏ qua Tuy nhiên, trường hợp động nhỏ tụi em sử dụng ta bỏ qua ảnh hưởng suất điện động cảm ứng Khi đó, mơ hình tốn học hệ truyền động điện đưa dạng: Sinh viên thực hiện: Nhóm 32 Hướng dẫn: TS Giáp Quang Huy 4.1.5 Tổng hợp mạch vòng dòng điện - Hàm truyền hệ hở đưa dạng: Gc(s) = Kpc - Để loại trừ điểm cực không (pole-zero cancellation method) chọn Kpc Kic cho: Gọi tần số cắt hàm truyền hệ hở mạch vịng dịng điện cc Chúng ta có biên độ hàm truyền mạch vòng điện cho tần số cắt: Với - cc = Từ đó, xác đinh hệ số Kpc, Kic điều khiển dòng điện: Trong đó: = 4π: Tần số cắt theo mạch dịng điện : Hệ số khuếch đại = 4.1.6 Tổng hợp mạch vòng tốc độ Tương tự cách làm tổng hợp mạch vòng dòng điện, xác định hàm truyền hệ hở mạch vòng tốc độ đưa dạng: Sinh viên thực hiện: Nhóm 33 Hướng dẫn: TS Giáp Quang Huy Theo phương pháp zero-pole cancellation, chọn cho: Gõ phương trình vào Khi hàm truyền hệ hở viết lại: Gọi tần số cắt (cross frequency) hàm truyền hệ hở mạch vòng tốc độ cs Biên độ hàm truyền hệ hở mạch vòng tốc độ cho tần số cắt: Từ đó, xác định hệ số điều khiển dịng điện: : Momen qn tính : Hệ số cấu tạo mạch : Tần số cắt theo mạch tốc độ B: lực tác động bên ngồi (ma sát, lực cản khơng khí, …) Sinh viên thực hiện: Nhóm 34 Hướng dẫn: TS Giáp Quang Huy CHƯƠNG 5: MÔ PHỎNG, ĐÁNH GIÁ KẾT QUẢ TRÊN MATLAB SIMULINK 5.1 Mô dạng hàm truyền 5.1.1 Mô Matlab Simulink 5.1.1.1 Nhập thông số Matlab 5.1.1.2 Mô Simulink Sơ đồ mạch mơ Hình 5.26 Sơ đồ mạch mơ hàm truyền Tốc độ đặt: Sinh viên thực hiện: Nhóm 35 Hình 5.27 Đồ thị tốc đồ đặt Kết đầu ra: Hướng dẫn: TS Giáp Quang Huy Hình 5.28 Đồ thị tốc độ đầu 5.2 Mô mạch nguyên lý Simulink 5.2.1 Khâu điều khiển Hình 5.29 Sơ đồ mô khâu điều khiển Tạo tín hiệu mong muốn khối Signal Builder Sử dụng phương pháp điều khiển tuyến tính khống chế phụ thuộc hai chỉnh lưu mắc song song ngược (điều khiển chung) nêu mục “3.3.3.1” Sử dụng mạch vòng dòng điện tốc độ để đưa góc kích Alpha1 Alpha2 Tín hiệu từ góc kích Alpha đưa vào khối đồng để điều khiển động bám theo tín hiệu đặt ban đầu Đầu += π Nếu �1 > ⇒ < ⇒ BCL1: làm việc chế độ nghịch lưu chờ �2 < ⇒ Ud1 = > ⇒ BCL2: làm việc chế độ chỉnh lưu Nếu �1 < ⇒ < ⇒ BCL1: làm việc chế độ chỉnh lưu �2 > ⇒ Ud1 = > ⇒ BCL2: làm việc chế độ nghịch lưu chờ Sinh viên thực hiện: Nhóm 36 Hướng dẫn: TS Giáp Quang Huy 5.2.2 Khâu đồng 5.2.2.1 Sơ đồ mô khâu đồng Hình 5.30 Sơ đồ mơ khâu đồng Sử dụng khối đồng pha xoay chiều cho điện áp đầu vào BC CA để sử dụng cho mạch pha Điện áp đầu vào khối đồng 220V, 50Hz Cho góc kích mở Alpha vào khối đồng 5.2.2.2 Kết đầu khâu đồng Hình 5.31 Kết đầu khâu đồng Kết đầu khối đồng xuất tín hiệu chân 3,6 9,12 Các xung xuất với góc Alpha đầu vào đồng với sóng sin pha 220v Sinh viên thực hiện: Nhóm 37 Hướng dẫn: TS Giáp Quang Huy 5.2.3 Khâu chỉnh lưu cầu kép Hình 5.32 Sơ đồ mạch chỉnh lưu cầu kép Sử dụng nguồn xoay chiều pha 220V,50Hz Cho tín hiệu đầu từ khâu đồng vào mạch cầu chỉnh lưu Sử dụng cuộn kháng để hạn chế dòng cân (đặc điểm điện cảm hạn chế dòng xoay chiều cho dòng chiều qua dễ dàng khơng gây nên tổn thất cơng suất tác dụng) 5.2.4 Mạch mơ Hình 5.33 Sơ đồ mạch mô điều khiển động cầu kép Sinh viên thực hiện: Nhóm 38 Hướng dẫn: TS Giáp Quang Huy 5.2.5 Kết mô 5.2.5.1 Đồ thị tốc độ đặt mong muốn Hình 5.34 Đồ thị tốc độ đặt mong muốn 5.2.5.2 Đồ thị tốc độ, mo-men, dịng điện động Hình 5.35 Đồ thị tốc độ, mo-men, dòng điện động 5.3 Nhận xét Về đáp ứng tốc độ đầu động cơ: Ta thấy hình dạng tốc độ đáp ứng bám sát theo yêu cầu tốc độ đặt Nhưng biên độ không đạt theo yêu cầu tiêu hao lượng trình chạy động Dịng khởi động động ổn định khơng tăng đột ngột từ tốc độ khởi động ổn định Sinh viên thực hiện: Nhóm 39 Hướng dẫn: TS Giáp Quang Huy Độ dao động dịng điện q trình hoạt động giảm, tác dụng trở kháng cân bằn, dẫn đến độ ổn định tốc độ quay mo-men KẾT LUẬN CHUNG Nhóm em xin chân thành cảm ơn TS Giáp Quang Huy, trưởng môn tự động hóa, thầy khoa điện trường Đại học Bách khoa Đà Nẵng truyền đạt kiến thức hỗ trợ cho đồ án nhóm em Đối với nhóm, làm đồ án giúp bọn em có khả làm việc chung với nhau, phân công công việc cách hợp lý hiệu Đồ án giúp bọn em hiểu thêm vận dụng kiến thức học phần điện tử công suất, kĩ thuật đo lường, truyền động điện, … Từ đó, qua dự án, chúng em nắm vững phương pháp điều khiển chỉnh lưu Tính tốn mơ hình hệ thống linh kiện mạch Tính tốn hệ thống truyền động, xử lí tín hiệu từ cảm biến Nắm rõ mơ mathlab, sử dụng phần mềm solidworks, proteus, altium, autocad Tuy nhiên chúng em chưa hoàn thành trọn vẹn code arduino, điều dẫn đến việc mơ proteus chạy mong muốn Mặc dù, có nhiều cố gắng thời gian kiến thức hạn chế, nên đồ án khơng thể tránh khỏi thiếu sót Vậy, em mong nhận ý kiến quý báu thầy, góp ý chân thành bạn Em xin chân thành cảm ơn! Sinh viên thực hiện: Nhóm 40 Hướng dẫn: TS Giáp Quang Huy TÀI LIỆU THAM KHẢO [1] Phạm Quốc Hải – “Hướng dẫn thiết kế điện tử công suất”, 2009, Hà Nội [2] R.Krishnan, “Electric Motor Drives”, 2001 [3] Ned Mohan, “Electric Drives”, 2003, University of Minnesota, Minneapolis, Minnesota, USA [4] Nguyễn Văn Nhờ, “Giáo trình thiết kế điện tử cơng suất”, Bách Khoa Hồ Chí Minh Sinh viên thực hiện: Nhóm 41 Hướng dẫn: TS Giáp Quang Huy ... mơ men điện từ Suất điện động cảm ứng động Phương trình mơ tả quan hệ điện- cơ tốc độ góc momen điện từ động sinh momen cản tải đặt lên trục động số momen quán tính lực tác động bên... hệ thấy suất điện động xem nhiễu vòng dòng điện Đối với động cơng suất trung bình lớn thành phần suất điện động bỏ qua Tuy nhiên, trường hợp động nhỏ tụi em sử dụng ta bỏ qua ảnh hưởng suất điện. .. dựng mơ hình tốn học 4.1.1 Mơ hình tốn học động Phương trình điện áp phần ứng điện áp đưa vào động suất điện động cảm ứng rotor , điện cảm, điện trở mạch phần ứng Sinh viên thực hiện:PBL2 HỆ TRUYỀN ĐỘNG ĐIỆN
41
62
0
THÔNG TIN TÀI LIỆU
Thông tin cơ bản
| Tiêu đề | Thiết Kế Hệ Thống Điều Khiển Và Giám Sát Tốc Độ Động Cơ Điện |
|---|---|
| Tác giả | Trần Trung Hiếu, Nguyễn Trung Hậu, Nguyễn Quang Tiến, Nguyễn Hữu Tấn, Trần Quốc Bảo |
| Người hướng dẫn | TS. Giáp Quang Huy |
| Trường học | Đại Học Đà Nẵng |
| Chuyên ngành | Kỹ Thuật Điều Khiển Và Tự Động Hóa |
| Thể loại | Dự Án Liên Môn |
| Thành phố | Đà Nẵng |
| Định dạng | |
|---|---|
| Số trang | 41 |
| Dung lượng | 3,28 MB |
Nội dung
Ngày đăng: 13/10/2022, 23:52
HÌNH ẢNH LIÊN QUAN




























TỪ KHÓA LIÊN QUAN
TRÍCH ĐOẠN
TÀI LIỆU CÙNG NGƯỜI DÙNG
-
41 62 0
TÀI LIỆU LIÊN QUAN
-
14 110 0
-
30 160 0
-
19 92 0
-
25 29 0
-
28 83 0
-
16 50 0
-
11 51 0
-
15 34 0