Mục đích và đối tượng nghiên cứu của luận án: a) Mục đích nghiên cứu: Nghiên cứu, mô hình hóa và xem xét các góc độ điều khiển hệ thống treo bán tích cực ứng dụng bộ điều khiển ánh xạ bảng với các tham số được tối ưu theo điều kiện bền vững, nhằm nâng cao hiệu quả làm việc của hệ thống treo bán tích cực. b) Đối tượng nghiên cứu: Đối tượng nghiên cứu của luận án là hệ thống treo có điều khiển của xe BMW 1 Series (E38). 2. Phương pháp nghiên cứu: Luận án kết hợp giữa nghiên cứu lý thuyết và thực nghiệm. Áp dụng phần mềm LabVIEW là công cụ chính trong tính toán, mô phỏng lý thuyết , đo lường thực nghiệm trên thiết bị tự chế tạo theo mô hình thực tế của hệ thống treo theo mô hình lý thuyết. 3. Các kết quả chính và kết luận: Những đóng góp mới của luận án: - Luận án đã xây dựng mô hình động lực học dao động ô tô ¼ để làm đối tượng điều khiển hệ thống treo bán tích cực. - Trên cơ sở nghiên cứu dao động ô tô và lý thuyết điều khiển, luận án đã xây dựng bộ điều khiển hệ thống treo bán tích cực dạng ánh xạ bảng. - Luận án đã đánh giá được chất lượng ổn định và yếu tố bền vững của bộ điều khiển cũng như đánh giá được độ êm dịu và an toàn chuyển động của ô tô sử dụng bộ điều khiển đã xây dựng. 2 - Tác giả luận án đã chế tạo thiết bị mô hình hệ thống treo ¼ sau đó đánh giá, kiểm chứng các kết quả lý thuyết và so sánh giữa hệ thống có và không có điều khiển. Các kết quả nghiên cứu thực nghiệm khẳng định tính đúng đắn của mô hình và độ tin cậy của kết quả nghiên cứu của luận án. Các kết luận rút ra từ kết quả nghiên cứu của luận án: - Bằng cả lý thuyết và thực nghiệm đã chứng tỏ hiệu quả của bộ điều khiển ánh xạ bảng khi áp dụng vào điều khiển hệ thống treo bán tích cực. - Về gia tốc thân xe có sự giảm rõ rệt (giảm xấp xỉ 40%) và duy trì ổn định giá trị gia tốc thân xe sau đó (giảm xấp xỉ 25%). - Lực tác dụng xuống nền đường khi hệ thống làm việc trong toàn vùng làm việc suy giảm ít (xấp xỉ trong khoảng từ 8,5% đến 16%), vẫn đảm bảo lực tác dụng xuống đường, đồng thời biên độ dao động của lực tác dụng xuống đường hẹp lại nên mặc dù giá trị bình phương trung bình của lực tác dụng xuống đường giảm nhưng nhìn chung không giảm đi tính an toàn chuyển động mà có hướng duy trì tốt hơn. Cải thiện đáng kể các chỉ tiêu làm việc của hệ thống treo. - Kết quả trong toàn giải làm việc đều thỏa mãn điều kiện êm dịu (gia tốc không lớn hơn 2,5 m/s2) và tính an toàn chuyển động (tải trọng tác dụng xuống
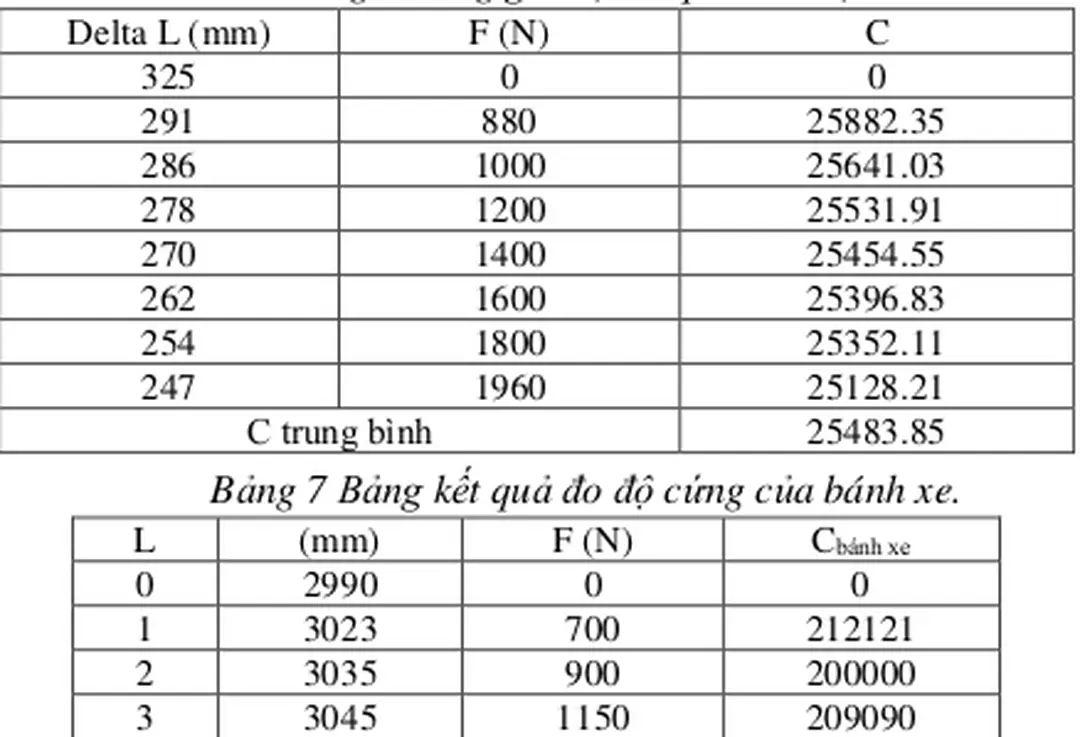
BỘ QUỐC PHÒNG HỌC VIỆN KỸ THUẬT QUÂN SỰ NGUYỄN TRỊNH NGUYÊN NGHIÊN CỨU GIẢI PHÁP ĐIỀU KHIỂN HỆ THỐNG TREO BÁN TÍCH CỰC BẰNG ÁNH XẠ BẢNG Chuyên ngành: khí động lực Mã số: 9.52.02.16 TĨM TẮT LUẬN ÁN TIẾN SĨ CƠ KHÍ ĐỘNG LỰC HÀ NỘI – 2022 CƠNG TRÌNH ĐƯỢC HỒN THÀNH TẠI HỌC VIỆN KỸ THUẬT QUÂN SỰ - BỘ QUỐC PHÒNG - Người hướng dẫn khoa học: PGS.TS NGUYỄN VĂN TRÀ PGS.TS ĐỖ VĂN DŨNG Phản biện 1: PGS TS TRẦN VĂN NHƯ Phản biện 2: PGS TS NGUYỄN TRỌNG HOAN Phản biện 3: PGS TS NGUYỄN THANH TIÊN Luận án bảo vệ Hội đồng đánh giá luận án cấp Học viện theo định số 2232/QĐ-HV, ngày 13 tháng năm 2022của Giám đốc Học viện Kỹ thuật Quân Theo đề nghị phịng Sau đại học tờ trình số 221/TTr-SĐH ngày 06/6/2022 Có thể tìm hiểu luận án tại: - Thư viện Học viện Kỹ thuật Quân - Thư viện Quốc gia MỞ ĐẦU Hệ thống treo (HTT) hệ thống quan trọng ảnh hưởng trực tiếp đến độ êm dịu, tính an tồn tiện nghi di chuyển Luận án “Nghiên cứu giải pháp điều khiển HTT bán tích cực ứng dụng ánh xạ bảng” thiết thực, có ý nghĩa thực tiễn, khoa học Mục tiêu luận án: Nghiên cứu, mơ hình hóa điều khiển HTT bán tích cực ứng dụng điều khiển ánh xạ bảng với tham số tối ưu theo điều kiện bền vững, nâng cao hiệu làm việc HTT bán tích cực Phương pháp nghiên cứu: Kết hợp nghiên cứu lý thuyết thực nghiệm Áp dụng phần mềm LabVIEW tính tốn, mơ lý thuyết , đo lường thực nghiệm chế tạo điều khiển Đối tượng nghiên cứu: Là HTT có điều khiển xe BMW Series (E38) Phạm vi nghiên cứu Luận án nghiên cứu HTT mơ hình ¼ xe, với tham số xe thực Các thí nghiệm thực bệ thử dao động khối lượng Ý nghĩa khoa học thực tiễn luận án: Về ý nghĩa khoa học: Luận án nghiên cứu xây dựng tính tốn mơ hình động lực học dao động ¼ xe sử dụng HTT bán tích cực Áp dụng lý thuyết ổn định, xây dựng điều khiển HTT bán tích cực điều khiển ánh xạ bảng với tham số xây dựng thuật toán tối ưu Về ý nghĩa thực tiễn: Luận án xây dựng phương pháp thí nghiệm, xác định tham số kết cấu cho mơ hình tính tốn Chế tạo điều khiển HTT bán tích cực, thực nghiệm, đánh giá hiệu điều khiển Chế tạo điều khiển HTT bán tích cực giúp nâng cao hiệu HTT bán tích cực theo quan điểu ổn định bền vững CHƯƠNG TỔNG QUAN VỀ VẤN ĐỀ NGHIÊN CỨU Hiện nay, với kết hợp nhiều lĩnh vực khoa học, phối hợp chặt chẽ ngành công nghiệp, kỹ thuật khác nhau…, nhược điểm khó khắc phục HTT bị động dần giải cải tiến tốt thông qua việc áp dụng HTT bán tích cực HTT tích cực Trong nghiên cứu tổng quan, luận án tập trung nghiên cứu, phân tích HTT có điều khiển sở lý thuyết, giảm chấn dùng HTT có điều khiển, tình hình nghiên cứu ngồi nước liên quan đến luận án Qua xác định nhiệm vụ cụ thể luận án +Nghiên cứu phương pháp điều khiển HTT +Tìm hiểu loại giảm chấn có điều khiển ứng dụng +Các phương pháp điều khiển đại +Phân tích tình hình nghiên cứu HTT bán tích cực giới + Phân tích tình hình nghiên cứu HTT bán tích cực nước +Trình bày nhiệm vụ luận án 1.1 PHƯƠNG PHÁP ĐIỀU KHIỂN HTT Trong khuôn khổ luận án, luận án khai thác khía cạnh nhỏ hệ thống động học động lực học miêu tả lời giải phương trình vi phân Chính lý trình bày trên, ngồi việc HTT tự điều chỉnh cần có thêm điều khiển giúp HTT hoạt động ổn định điều kiện có nhiễu loạn phát sinh hoạt động giúp đảm bảo nâng cao hiệu làm việc HTT trình hoạt động, đáp ứng tiêu chí êm dịu an tồn chuyển động Với mục tiêu tìm kiếm giá trị thỏa mãn ổn định cho HTT trì tính bền vững, luận án chọn lựa điều khiển ánh xạ bảng bắt nguồn từ lý thuyết nhà khoa học Poincare [12] Birkhoff [13] giáo sư H.Su [14] vận dụng, khởi xướng từ năm 1980 1.2 TÌM HIỂU CÁC GIẢM CHẤN CÓ ĐIỀU KHIỂN VÀ ỨNG DỤNG Từ HTT có điều khiển đời, cấu chấp hành kèm chế tạo để đáp ứng nhu cầu điều khiển Các cấu chấp hành cho HTT điều khiển khái quát sau: Giảm chấn thủy lực có van tiết lưu thay đổi liên tục Giảm chấn từ hóa MR (Magneto-Rheological) 1.3 CÁC PHƯƠNG PHÁP ĐIỀU KHIỂN HIỆN ĐẠI Trong trình phát triển, hệ thống điều khiển cải tiến thay đổi theo trường hợp đối tượng cụ thể, lịch sử phát triển lý thuyết điều khiển khái quát theo giai đoạn: Phương pháp biến phân cổ điển Euler-Lagrange 1766; Tiêu chuẩn ổn định Lyapunov 1892; Trí tuệ nhân tạo 1950; Hệ thống điều khiển máy bay siêu nhẹ 1955; Nguyên lý cực tiểu Pontryagin 1956; Phương pháp quy hoạch động Belman 1957; Điều khiển tối ưu tuyến tính dạng tồn phương LQR ( LQR : Linear Quadratic Regulator ); Thuật toán di truyền 1960; Nhận dạng hệ thống 1965; Logic mờ 1965; Luật điều khiển hệ thống thích nghi mơ hình tham chiếu MRAS tự chỉnh định STR 1970; Hệ tự học Tsypkin 1971; Sản phẩm công nghiệp 1982; Lý thuyết bền vững 1985; Tính tốn mềm điều khiển tích hợp 1985… Nhìn chung phương pháp tính điều khiển có điểm mạnh hạn chế định, người ta thường có xu hướng kết hợp chúng lại với để tạo mơ hình điều khiển có khả đáp ứng cao với địi hỏi thực tế Việc kết hợp cho phương pháp điều khiển điều khiển tích hợp 1.4 CÁC NGHIÊN CỨU VỀ HTT BÁN TÍCH CỰC TRÊN THẾ GIỚI Từ năm đầu thập kỷ 80, HTT điều khiển bắt đầu hình thành Colin Chapman phát triển khái niệm HTT điều khiển vào năm 1980 để cải thiện tính êm dịu xe đua Năm năm sau, vào năm 1985 HTT điều khiển áp dụng cho mẫu xe Excel với giảm chấn thủy lực điện, hệ thống không cung cấp để bán cho công chúng, nhiều xe trình diễn chế tạo nhà sản xuất xe sản xuất thử nghiệm Kỹ sư Grand Prix hãng xe Williams lắp đặt HTT chủ động cho xe F1 vào năm 1992, tạo xe thành công hãng ôtô quốc tế Fédération Internationale de l'Automobile định cấm sử dụng công nghệ Năm 1999, Mercedes-Benz CL-Class (C215) giới thiệu hệ thống điều khiển ổn định thân xe với servo thủy lực áp lực bánh xe điều khiển điện tử Thập kỷ 80 mốc quan trọng đánh dấu đời HTT tích cực với nhiều hệ thống nhiều hãng sản xuất xe đời với nhiều tên gọi khác TEMS Toyota năm 1986; DUET-SS Nissan năm 1990; FAS Infiniti năm 1990; VSX Citroën năm 1992; RSS Cadillac năm 1993…Sau năm 2000 HTT chủ động biết đến nhiều dòng xe cao cấp BMW hay số hệ thống biết đến BOSCH… Các nghiên cứu giúp thấy rõ tính ưu việt việc cần thiết phải điều khiển HTT dù tích cực hay bán tính cực Các kết nghiên cứu cho thấy ưu điểm HTT có điều khiển Mặc dù HTT điều khiển bán tích cực chưa đáp ứng hồn tồn so với HTT tích cực đích đến nhắm tới nghiên cứu triển khai vào thực tế tính kinh tế, hiệu đơn giản kết cấu 1.5 NGHIÊN CỨU VỀ HTT BÁN TÍCH CỰC TRONG NƯỚC Nhìn chung cơng bố hầu hết dạng nghiên cứu lý thuyết mơ có nghiên cứu áp dụng thiết bị thật Nghiên cứu áp dụng mơ hình thật chưa quan tâm đến kiểm chứng đánh giá thông số điều khiển Đối với nghiên cứu nước, nghiên cứu dao động tơ nói chung HTT nói riêng đa phần theo định hướng tối ưu hóa kết cấu Hầu hết nghiên cứu chưa khai thác khía cạnh ổn định nhiễu bên ngồi hay nội hệ thống điều khiển Chưa quan tâm đến độ bền vững hệ thống 1.6 SO SÁNH CÁC GIẢI PHÁP ĐIỀU KHIỂN HTT BÁN TÍCH CỰC Để có nhìn tổng quát hệ thống treo có điều khiển, thông qua nghiên cứu tác giả khác [42][43][44], luận án phân tích hệ thống sở so sánh hiệu suất, tính linh hoạt mức độ phức tạp hệ thống nhằm chọn giải pháp thích hợp áp dụng cho luận án Hình 1.24 So sánh hiệu phương pháp điều khiển trạng thái điều khiển tuyến tính Hình 1.27 So sánh hiệu phương pháp SHADD hệ thống treo bán tích cực thuật tốn LPV So với HTT tồn tại, phân tích, HTT bán tích cực đáp ứng nâng cao tiêu chí độ êm dịu an toàn chuyển động đồng thời dễ dàng triển khai vào thực tế có kết cấu đơn giản, khơng cần thêm hệ thống phụ trợ nào, kích thước giảm chấn bán tích cực tương đồng với kích thước HTT bị động, phát sinh không gian bố trí, đồng thời giá thành so với HTT tích cực kinh tế nhiều 1.7 NHIỆM VỤ CỦA LUẬN ÁN Luận án tiến hành nghiên cứu chế tạo điều khiển HTT bán tích cực với sở lý thuyết sử dụng mơ hình ¼ xe Giải pháp điều khiển đề xuất Điều khiển ánh xạ bảng (CMC) với thông số điều khiển tính tốn trích chọn thuật tốn tối ưu theo điều kiện bền vững Song song với nghiên cứu lý thuyết, luận án đề xuất mơ hình thực nghiệm ¼ xe với kích thước thực kèm theo kích thích tạo xung mặt đường điểu khiển thay đổi thơng số kích thích Bằng mơ hình thực nghiệm tương quan với mơ hình lý thuyết, luận án áp dụng kiểm chứng điều khiển đánh giá hiệu điều khiển CHƯƠNG CƠ SỞ LÝ THUYẾT HỆ THỐNG TREO BÁN TÍCH CỰC 2.1 TÍNH TỐN MƠ HÌNH ĐỘNG LỰC HỌC HTT ¼ XE Trên sở mơ hình hệ dao động hai bậc tự (hai khối lượng) hình 2.1a Các lực phản lực mơ tả hình 2.1b, z0 mơ tả chuyển dịch mấp mơ mặt đường, z1 mô tả chuyển dịch phần tử không treo z2 mô tả chuyển dịch phần tử treo Hình 2.1 Mơ hình động lực học hệ bậc tự do.[1] Thay (1),(2),(3) vào (4)(5) ta có hệ phương trình vi phân (6): -M.z̈ -C2 (z2 -z1 )-K2 (ż -ż )=0 { -m.z̈ +C2 (z2 -z1 )+K2 (ż -ż )-C1 (z1 -z0 )-K1 (ż -ż )=0 (6) Trên sở mơ hình tính tốn trên, luận án thiết lập mơ hình tính tốn HTT ¼ xe với giảm chấn EDC Điểm mơ hình tính tốn hệ số cản giảm chấn có hai giá trị cụ thể ứng với trình làm việc nén hệ số cản giảm chấn nén trả hệ số cản giảm chấn trả trình bày mơ hình tính tốn sau: Hình 2.2 Mơ hình động lực học ¼ bán tích cực Phương trình mơ tả động lực học mơ hình tính tốn viết lại sau: −M z̈ − C2 (z2 − z1 ) − K 𝐸𝐷𝐶 (ż − ż ) = −m z̈ + C2 (z2 − z1 ) + K 𝐸𝐷𝐶 (ż − ż ) − C1 (z1 − z0 ) − K1 (ż − ż ) = { 𝐾 : (ż − ż ) < 𝐾𝐸𝐷𝐶 = { 𝑛𝑒𝑛 𝐾𝑡𝑟𝑎 : (ż − ż ) ≥ (7) 14 3.2.2 XÂY DỰNG BẢNG THAM SỐ 3.2.2.1 CƠ SỞ XÂY DỰNG BÀI TOÁN TỐI ƯU Để xây dựng toán tối ưu cho tham số điều khiển, luận án sử dụng phương pháp duyệt toàn bộ, q trình tính tốn bước tái cấu trúc tham số thay đổi cực biên q trình tính tốn Hàm tiêu chất lượng mơ tả tốn, phát biểu: 3.2.2.2 XÂY DỰNG GIẢI THUẬT TÍNH TỐN TÌM GIÁ TRỊ CHO BẢNG THAM SỐ ĐIỂU KHIỂN Hình 3.7 Lập trình phần mềm tính tốn tối ưu Hình 3.8 Bảng giá trị Knen Hình 3.9 Bảng giá trị Ktra 3.2.3 MÔ PHỎNG BỘ ĐIỀU KHIỂN CMC 3.2.3.1 XÂY DỰNG PHẦN MỂM MÔ PHỎNG BỘ ĐIỂU KHIỂN CMC Với kết có bảng tham số điều khiển cho điều khiển CMC luận án xây dựng phần mềm tính tốn mơ dựa tảng LabVIEW Cấu trúc phần mềm mô mơ tả qua sơ đồ khối: Hình 3.10 Sơ đồ khối nguyên lý mô điều khiển CMC 15 3.2.3.2 LẬP TRÌNH PHẦN MỀM MƠ PHỎNG BỘ ĐIỀU KHIỂN CMC Từ khối chức năng, luận án lập trình mơ HTT có điều khiển song song với HTT thụ động nhằm so sánh kết nhận xét tính hiệu điều khiển CMC, nội dung lập trình thể theo hình 3.11 Hình 3.11 Mã nguồn chương trình mơ điều khiển CMC 3.2.3.3 MƠ PHỎNG HTT BÁN TÍCH CỰC CĨ ĐIỀU KHIỂN CMC Cấp đường B vận tốc 30km/h chu kỳ sóng 4m Gia tốc thân xe DD Gia tốc thân xe DK 0.5 Z" (m/s2) Hình 3.12 So sánh gia tốc thân xe với cấp 0.0 đường B vận tốc 30km/h -0.5 500 1000 Thoi gian (1/100 s) Cấp đường C vận tốc 30km/h chu kỳ sóng 4m Lực tác dụng xuống đường DD Lực tác dụng xuống đường DK Lực tác dụng xuống đường (N) 8000 Hình 3.19 So sánh lực 6000 tác dụng xuống đường, 4000 2000 cấp đường C vận tốc 30km/h -2000 500 1000 Thoi gian (1/100 s) 3.3 PHÂN TÍCH ỔN ĐỊNH CỦA BỘ ĐIỀU KHIỂN Trên sở hàm truyền đạt hệ thống treo xây dựng, luận án phân tích ổn định hệ thống treo theo sơ đồ khối cho hệ kín Gk(s) sau: Hình 3.53 Sơ đồ khối phân tích ổn định HTT Trong đặc tính tần số hệ hở G(s) xây dựng hàm 16 truyền Wz2z0 Mục tiêu đặt xét tính ổn định hệ thống kín 0.4 Cac toa cuc DD 0.3 0.2 0.1 -0.1 -0.2 -0.3 -0.4 -0.25 -0.2 -0.15 -0.1 Truc thuc | Re -0.05 Hình3.54a Giản đồ cực trường hợp danh định 0.4 Cac toa cuc DK 0.3 0.2 0.1 -0.1 -0.2 -0.3 -0.4 -0.3 -0.25 -0.2 -0.15 -0.1 Truc thuc | Re -0.05 Hình 3.54b Giản đồ cực trường hợp điều khiển Giản đồ cực mặt phẳng phức hai trường hợp danh định trường hợp có điều khiển ta thấy hệ thống thỏa mãn điều kiện ổn định So với hệ thống có điều khiển hệ thống danh định đạt ổn định đáp ứng hệ thống thay đổi điều kiện làm việc có biến động lớn Từ kết cho thấy điều khiển đạt yêu cầu ổn định bền vững 3.4 ĐÁNH GIÁ YẾU TỐ BỀN VỮNG Kết đánh giá bền vững trả hai trường hợp danh định có điều khiển CMC nhằm đánh giá yếu tố bền vững trình điều khiển 17 Bieu Bode bien Danh Dinh 50 45 40 35 30 25 20 15 10 0 0.5 1.5 2.5 3.5 4.5 5.5 6.5 7.5 8.5 Tan so (Hz) 9.5 10 Hình 3.57 Biểu đồ Bode trường hợp danh định Bieu Bode bien Dieu Khien 45 40 35 30 25 20 15 10 0 0.5 1.5 2.5 3.5 4.5 5.5 6.5 7.5 8.5 Tan so (Hz) 9.5 10 Hình 3.58 Biểu đồ Bode trường hợp có điểu khiển CMC Kết phân tích Bode pha cho thấy, so với danh định hệ thống có độ mở pha nhỏ xấp xỉ 50%, thị màu cho thấy có xếp trật tự đáp ứng hệ thống cho dù liệu kích thích đưa vào mơ kèm theo thay đổi khối lượng không gây ổn định pha, hình 3.59 hình 3.60 Hay nói cách cụ thể, hệ thống đạt điều kiện ổn định nội pha Như với phân tích bền vững cho kết hệ thống sau điều khiển đạt điều kiện ổn định nội 18 CHƯƠNG NGHIÊN CỨU THỰC NGHIỆM 4.1 XÂY DỰNG MỤC ĐÍCH THÍ NGHIỆM Luận án chế tạo thiết bị thí nghiệm dao động ¼ xe độ tương quan cao với mơ hình lý thuyết nhằm: Xác định thơng số kết cấu để đưa vào mơ hình tính tốn, mơ phỏng, cụ thể độ cứng, hệ số cản giảm chấn; Kiểm tra độ tương quan mơ hình thực nghiệm mơ hình lý thuyết; Thực nghiệm điều khiển sau thiết kế 4.2 XÂY DỰNG THIẾT BỊ THÍ NGHIỆM Thiết bị thí nghiệm mơ tả vẽ hình 4.1 Hình 4.1 Mơ tả thiết bị Hình 4.2 Thiết bị theo thiết kế thiết bị thí nghiệm hồn chỉnh lắp đặt phịng thí nghiệm Thiết bị thí nghiệm chế tạo sở bám sát mô hình lý thuyết dao động ¼ xe, thơng số kết cấu lấy từ thông số đối tượng thí nghiệm theo tỉ lệ 1:1 4.2.1 LỰA CHỌN HỆ THỐNG CẢM BIẾN VÀ THIẾT BỊ ĐO LƯỜNG Hình 4.4 Lựa chọn cảm biến gia tốc Cảm biến bảo vệ vỏ kim loại, chống sốc khử nhiễu 4.2.1.2 THIẾT KẾ DỤNG CỤ ĐO CHUYỂN DỊCH Hình 4.5 Cảm biến vị trí tuyến tính 19 4.2.1.3 THIẾT KẾ DỤNG CỤ ĐO LỰC TÁC DỤNG XUỐNG ĐƯỜNG Luận án sử dụng cảm biến lực (Loadcell) Kyowa 20kN, LUK-A20kN Loadcell dùng nhiều thí nghiệm khác nhau, để xác định thông số, kiểm chứng điều khiển, đo trực tiếp lực cản giảm chấn Hình 4.6 Loadcell Kyowa 20kN 4.2.2 THIẾT KẾ BỘ ĐIỀU KHIỂN CMC TRÊN NỀN TẢNG MYRIO 4.2.2.1 THIẾT KẾ PHẦN MỀM ĐỌC VÀ TRUY XUẤT BẢNG MAP Chương trình điều khiển viết biên dịch tảng LabVIEW, thuật tốn trình bày theo lưu đồ hình 4.9 Hình 4.9 Lưu đồ thuật tốn điều khiển 4.2.2.2 THIẾT KẾ PHẦN CỨNG ĐIỀU KHIỂN VAN GIẢM CHẤN Để điều khiển hệ số cản giảm chấn cho giảm chấn EDC, Mạch điện điều khiển sử dụng mạch cơng suất sử dụng Transitor có sơng suất cao, hệ số khuếch đại nhỏ, tích hợp sẵn mạch phân cực bảo vệ dòng Mỗi van điều khiển (van nén van trả) điều khiển độc lập transitor 20 Hình 4.12 Sơ đồ mạch điều khiển van giảm chấn 4.3 NỘI DUNG CÁC THÍ NGHIỆM 4.3.1 XÁC ĐỊNH CÁC THƠNG SỐ KẾT CẤU 10000 9000 8000 7000 6000 5000 4000 3000 2000 0.1 0.2 0.000 3.333 6.667 10.00 13.33 16.67 20.00 23.33 26.67 30.00 33.33 36.67 40.00 43.33 46.67 50.00 53.33 56.67 60.00 63.33 66.67 70.00 73.33 76.67 80.00 83.33 86.67 90.00 93.33 96.67 100.0 14000 13000 He so can giam chan (Ns/m) 11000 He so can giam chan (Ns/m) 15000 0.000 3.333 6.667 10.00 13.33 16.67 20.00 23.33 26.67 30.00 33.33 36.67 40.00 43.33 46.67 50.00 53.33 56.67 60.00 63.33 66.67 70.00 73.33 76.67 80.00 83.33 86.67 90.00 93.33 96.67 100.0 12000 12000 11000 10000 9000 8000 7000 6000 5000 4000 3000 2000 1000 0.3 0.1 Van toc dich chuyen tuong doi cua giam chan 0.2 0.3 Van toc dich chuyen tuong doi cua giam chan Hình 4.15 MAP điều khiển Hình 4.16 MAP điều khiển cho Knen cho Ktra 4.3.1.2 XÁC ĐỊNH ĐỘ CỨNG CỦA GIẢM CHẤN; ĐỘ CỨNG LỐP Bảng Bảng giá trị kết đo Delta L (mm) F (N) 325 291 880 286 1000 278 1200 270 1400 262 1600 254 1800 247 1960 C trung bình C 25882.35 25641.03 25531.91 25454.55 25396.83 25352.11 25128.21 25483.85 Bảng Bảng kết đo độ cứng bánh xe L (mm) 2990 3023 3035 3045 F (N) 700 900 1150 Cbánh xe 212121 200000 209090 21 10 3060 1300 3067 1500 3080 1720 3090 1940 3093 2120 3100 2300 3120 2470 Độ cứng bánh xe trung bình Chọn CL = 200000 185714 194805 191111 194000 205825 209090 190000 199175 4.3.1.3 XÁC ĐỊNH HỆ SỐ CẢN GIẢM CHẤN CỦA LỐP Bảng Bảng kết tính tốn sau lần thực nghiệm A1 13.6265 13.3654 14.0132 A2 M D 9.8482 2500 1.383654 9.71358 2500 1.37595 10.3215 2500 1.357671 Hệ số cản bánh xe trung bình KL Chọn KL 4500 Ψ 0.102868 0.101117 0.096921 KLbánh xe 4600.39 4522.107 4334.427 4485.641 4.3.2 KIỂM TRA ĐỘ TƯƠNG QUAN CỦA MƠ HÌNH THỰC NGHIỆM VÀ MƠ HÌNH LÝ THUYẾT Q trình kiểm tra tương quan động lực học theo sơ đồ sau: Hình 4.20 Sơ đồ khối q trình phân tích tương quan động lực học Gia toc thuc te Gia toc ly thuyet Hình 4.21 Kết so Gia toc (m/s2) sánh tương quan lý thuyết thực nghiệm với tham số -1 R=0.949924 5000 10000 Thoi gian (ms) lọc thông thấp 10Hz, R= 0.949 22 Qua đồ thị, luận án chứng minh mơ hình thí nghiệm thực tế chế tạo đạt yêu cầu tương đồng lý thuyết thực nghiệm để áp dụng thí nghiệm đánh giá điều khiển, đạt độ tin cậy cao 4.3.3 THỰC NGHIỆM BỘ ĐIỀU KHIỂN SAU KHI ĐÃ THIẾT KẾ Hình 4.22: Sơ đồ bố trí thiết bị đo lường điều khiển Thực nghiệm so sánh HTT bị động HTT có điều khiển trình bày theo biểu đồ quan sát gia tốc phần treo, gia tốc phần không treo, lực tác dụng xuống đường, với HTT vận hành tần số kích thích thay đổi khoảng tần số 0,5 đến Hz Các biểu đồ đo ghị trạng thái dao động ổn định 5000 2.5 GIA TOC TREO (m/s2) 2.0 1.5 1.0 0.5 0.0 -0.5 -1.0 -1.5 -2.0 -2.5 GIA TOC TREO (m/s2) - DIEU KHIEN GIA TOC TREO (m/s2) - KHONG DIEU KHIEN -3.0 2000 4000 6000 8000 10000 THOI GIAN (ms) Hình 4.25 So sánh gia tốc thân xe tần số kích thích 2,75 Hz LUC TAC DUNG XUONG DUONG (N) 3.0 LUC TAC DUNG XUONG DUONG (N) - DIEU KHIEN LUC TAC DUNG XUONG DUONG (N) - KHONG DIEU KHIEN 4500 4000 3500 3000 2500 2000 1500 1000 500 0 2000 4000 6000 8000 10000 THOI GIAN (ms) Hình 4.26 So sánh lực tác dụng xuống đường tần số 2,75 Hz Trong kết này, tần số kích thích 2,75 Hz, gia tốc phần treo hai trường hợp không điểu khiển có điều khiển cho thấy: Giá trị gia tốc phần treo điều khiển giảm trung bình 0.75 m/s2 Gia tốc thân xe bắt đầu giảm nhiều kết tối ưu cho thấy có nhiều khoảng giá trị MAP đạt tối ưu nên gia tốc thân xe không vượt 2,5m/s2; Lực tác dụng xuống đường, tần số kích thích 2,75 Hz, hai trường hợp khơng điểu khiển có điều khiển cho thấy giá trị lực 23 tác dụng xuống đường giảm chấn danh định có giá trị dao động lớn quanh giá trị tải trọng tĩnh, phần biên độ thấp có giá trị nhỏ khoảng 200N khả tách bánh cao Ngược lại có điều khiển lực tác dụng xuống đường giảm với biên độ lớn giảm xấp xỉ 22%, nhiên khoảng dao động lực nhỏ lại giúp bám đường tốt so với trường hợp danh định, tăng xấp xỉ 22,7% Để có đánh giá tồn diện, luận án xây dựng đặc tính tần số biên độ gia tốc thân xe lực tác dụng xuống đường thực nghiệm với tần số kích thích từ thấp đến 6,5 Hz Và kết thể hình 4.33 hình 4.34 4000 1.5 LUC TAC DUNG (N) GIA TOC THAN XE (m/s2) 3500 1.0 0.5 3000 2500 2000 1500 1000 500 GIA TOC THAN XE (m/s2) - Co dieu khien GIA TOC THAN XE (m/s2) - Khong dieu khien LUC TAC DUNG (N) - Co dieu khien LUC TAC DUNG (N) - Khong dieu khien 0.0 6 TAN SO (Hz) TAN SO (Hz) Hình 4.33 So sánh đặc tính tần Hình 4.34 So sánh đặc tính tần số biên độ gia tốc thân xe số biên độ tải trọng tác dụng xuống đường Ngồi vùng cộng hưởng, khoảng tần số kích thích 2,5Hz, kết tối ưu có khoảng làm việc đạt điều kiện bền vững Với điểm khơng đạt bền vững HTT bán tích cực khơng điều chỉnh giảm chấn Từ tần số kích thích 2,5 Hz đến Hz hai đặc tính tần số biên độ giảm nhanh đến giá trị ổn định Mức độ giảm mạnh đến 40% gia tốc thân xe giảm 16% lực tác dụng xuống đường mà đảm bảo tính an tồn chuyển động Cả hai tiêu thỏa mãn tiêu chí HTT Từ tần số 3Hz trở sau, Gia tốc thân xe trì mức độ giảm biên độ xung quanh 25%, lực tác dụng xuống đường giảm giảm khoảng 8,5% Tuy nhiên khả bám đường không giảm biên độ dao động lực thu hẹp 24 KẾT LUẬN VÀ KIẾN NGHỊ Nghiên cứu điều khiển HTT bán tích cực lý thuyết thực nghiệm chứng tỏ hiệu điều khiển CMC áp dụng vào điều khiển HTT bán tích cực Về gia tốc thân xe có giảm rõ rệt (giảm xấp xỉ 40%) trì ổn định giá trị gia tốc thân xe sau (giảm xấp xỉ 25%) , lực tác dụng xuống đường hệ thống làm việc tồn vùng làm việc suy giảm (xấp xỉ khoảng từ 8,5% đến 16%), đảm bảo lực tác dụng xuống đường, đồng thời biên độ thấp lực tác dụng xuống đường tăng nên dù giá trị bình phương trung bình lực tác dụng xuống đường giảm khơng giảm tính an tồn chuyển động Bằng kết lý thuyết thực nghiệm thiết bị, luận án chế tạo hoàn tất thử nghiệm điều khiển CMC, nghiên cứu cho đánh giá hiệu giải pháp điều khiển HTT đề Những kiến nghị đề xuất hướng nghiên cứu - Có thể tiếp tục nghiên cứu tìm thêm yếu tố gây ổn định để bổ sung thêm yêu cầu tính tốn nhằn có điều khiển bền vững nữa; - Trên sở giải thuật thực hiện, với nhu cầu tính tốn nhiều hơn, tập đầu vào lớn phát triển thêm giải thuật phục vụ để giảm thời gian tính tốn số bước tính lớn mà xây dựng MAP có đầy đủ tham số tồn vùng làm việc HTT; - Có thể áp dụng điều khiển CMC cho hệ thống động lực khác ô tô, điều khiển dễ áp dụng; - Có thể phát triển giải pháp điều khiển HTT toàn cục dựa kết nghiên cứu giải pháp điều khiển HTT ¼ xe hồn thiện DANH MỤC CƠNG TRÌNH CỦA TÁC GIẢ Nguyễn Văn Trà, Nguyễn Trịnh Nguyên Một số định hướng điều khiển hệ thống treo bán tích cực; Kỷ yếu hội nghị khoa học cơng nghệ tồn quốc khí-Lần thứ IV 2015 Nhà xuất Đại học quốc gia TPHCM; ISBN: 978-604-73-3690- Nguyễn Trịnh Nguyên, Nguyễn Văn Trà Nghiên cứu chế tạo mô hình hệ thống treo ¼ xe phục vụ cho nghiên cứu thử nghiệm Kỷ yếu hội nghị khoa học cơng nghệ tồn quốc khí - động lực 2016; Nhà xuất Bách khoa Hà Nội; ISBN: 978-604-950040-4 Nguyễn Trịnh Nguyên, Nguyễn Văn Trà Phan Minh Hiếu, Lê Quang Trí, Nguyễn Văn Tuấn Anh, Nghiên cứu chế tạo thiết bị xác định hệ số cản giảm chấn phương pháp đo trực tiếp Hội Nghị Khoa học cơng nghệ tồn quốc Cơ Khí-Động Lực 2017 Nguyễn Trịnh Nguyên, Nguyễn Văn Trà Kiểm tra tính ổn định mơ hình điều khiển hệ thống treo bán tích cực lý thuyết điều khiển bền vững 2018 Tạp chí Cơ khí Việt Nam (ISSN.0866-7056), 51-59 Nguyễn Trịnh Nguyên, Nguyễn Văn Trà Nghiên cứu xây dựng bảng tham số điều khiển cho hệ thống treo bán tích cực dùng điều khiển ánh xạ bảng Tạp chí khoa học kỹ thuật thủy lợi môi trường, Số đặc biệt, 10/2019 Nguyễn Trịnh Nguyên, Nguyễn Văn Trà Nghiên cứu chế tạo điều khiển ánh xạ bảng theo điều kiện bền vững cho hệ thống treo bán tích cực Tạp chí Cơ khí Việt Nam 10 (ISSN 2615 - 9910), 162 2020 ... Thời điểm t ta có: z0(t) = z0(x) (t)=(x) ; ż (t) = zh cos( t) (9) 2.2 .2 KÍCH THÍCH DẠNG MẤP MƠ NGẪU NHIÊN 2.2 .2.1 TIÊU CHUẨN ISO 8608:1995 Trong nghiên cứu mấp mô mặt đường, kết mật độ... 0,5 đến Hz Các biểu đồ đo ghị trạng thái dao động ổn định 5000 2.5 GIA TOC TREO (m/s2) 2.0 1.5 1.0 0.5 0.0 -0.5 -1.0 -1.5 -2.0 -2.5 GIA TOC TREO (m/s2) - DIEU KHIEN GIA TOC TREO (m/s2) - KHONG... HỆ THỐNG TREO BÁN TÍCH CỰC 2.1 TÍNH TỐN MƠ HÌNH ĐỘNG LỰC HỌC HTT ¼ XE Trên sở mơ hình hệ dao động hai bậc tự (hai khối lượng) hình 2.1 a Các lực phản lực mơ tả hình 2.1 b, z0 mô tả chuyển dịchNghiên cứu giải pháp điều khiển hệ thống treo bán tích cực bằng ánh xạ bảng tt
32
1
0
THÔNG TIN TÀI LIỆU
Thông tin cơ bản
| Tiêu đề | Nghiên Cứu Giải Pháp Điều Khiển Hệ Thống Treo Bán Tích Cực Bằng Ánh Xạ Bảng |
|---|---|
| Tác giả | Nguyễn Trịnh Nguyên |
| Người hướng dẫn | PGS.TS Nguyễn Văn Trà, PGS.TS Đỗ Văn Dũng |
| Trường học | Học viện Kỹ thuật Quân sự |
| Chuyên ngành | Cơ khí động lực |
| Thể loại | Luận án tiến sĩ |
| Năm xuất bản | 2022 |
| Thành phố | Hà Nội |
| Định dạng | |
|---|---|
| Số trang | 32 |
| Dung lượng | 3,33 MB |
Nội dung
Ngày đăng: 23/06/2022, 11:14
HÌNH ẢNH LIÊN QUAN














TRÍCH ĐOẠN
TÀI LIỆU CÙNG NGƯỜI DÙNG
-
199 16 0
-
151 96 0
-
106 111 0
-
25 176 0
-
194 138 0
-
Nghiên cứu giải pháp điều khiển bám quỹ đạo tàu thủy có ràng buộc tín hiệu và bất định hàm ở đầu vào166 104 0
TÀI LIỆU LIÊN QUAN
-
1 34 0
-
38 12 0
-
489 16 0
-
304 5 0
-
306 32 1
-
158 9 0
-
14 4 0
-
14 21 0