Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 6 docx

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 1 docx
... 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 1 LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG Giảng viên: TS. Huỳnh Thái Hoàng Bộ môn Điều Khiển Tự Động Khoa Điện – ... http://www2.hcmut.edu.vn/~hthoang/ Môn học Môn học 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 2 HỆ THỐNG ĐIỀU KHIỂN PHI TUYẾN HỆ THỐNG ĐIỀU KHIỂN PHI TUYẾN Chương 8 Chương 8 26 Septe...
Ngày tải lên: 08/08/2014, 00:20
Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 2 ppt
... 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 15 Mô tả toán học hệ phi tuyến dùng phương trình trạng thá Mô tả toán học hệ phi tuyến dùng phương trình trạng thá i i Hệ phi tuyến liên ... là các hàm phi tuyến = = ))(),(()( ))(),(()( tuthty tutt x xfx & 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 14 Mô tả hệ phi tuyến dùng phương trình vi ph...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 3 pdf
... hoặc 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 20 Điểm dừng của hệ phi tuyến Điểm dừng của hệ phi tuyến = = ))(),(()( ))(),(()( tuthty tutt x xfx & Xét hệ phi tuyến mô tả bởi PTTT phi ... pháp tuyến tính hóa Phương pháp hàm mô tả Phương pháp Lyapunov Các phương pháp khảo sát hệ phi tuyến Các phương pháp khảo sát hệ phi tuyến 26 Sept...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 4 pdf
... tónh: + + + − + + − = )( )( 1 )( )( )(cos )( )( )( ),( 2 2 2 1 2 2 tu mlJ tx mlJ B tx mlJ gMlml tx u C xf 0 )( 1 1 = ∂ ∂ = u u f b ,x 2 )( 2 2 1 mlJ u f b u + = ∂ ∂ = ,x = 2 1 b b B 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 32 Điều khiển ổn định hóa hệ phi tuyến quanh điểm làm việc Điều khiển ổn định hóa hệ phi tuyến quanh điểm làm việ...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 5 doc
... khâu tuyến tính gần đúng bằng: )sin()( 11 ϕ ω + ≈ tYty 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 35 Điều khiển ổn định hóa hệ phi tuyến quanh điểm làm việc Điều khiển ổn định hóa hệ phi tuyến ... khâu tuyến tính theo sơ đồ khối như sau: u(t) r(t)=0 + − y(t) G(s) e(t) N(M) u(t) 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 34 Điều khiển ổn định hóa...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 6 docx
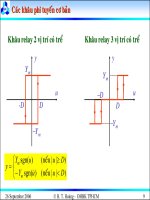
... 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 45 Hàm mô tả của các khâu phi tuyến cơ bản Hàm mô tả của các khâu phi tuyến cơ bản Khâu relay 3 vị tr Khâu relay 3 vị tr í í 26 September 20 06 © ... gọi là hệ số khuếch đại phức của khâu phi tuyến. Vì quan hệ vào ra của khâu phi tuyến có thể mô tả gần đúng bằng hệ số khuếch đại phức N(M) nên N(M) còn được gọi là hàm...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 7 potx
... t M Dt t KM 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 56 Khảo sát chế độ dao động trong hệ phi tuyến Khảo sát chế độ dao động trong hệ phi tuyến - - Thí dụ 1 Thí dụ 1 Xét hệ phi tuyến có sơ ... 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 55 Trình tự khảo sát chế độ dao động trong hệ phi tuyến Trình tự khảo sát chế độ dao động tron...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 8 ppsx
... 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 59 Khảo sát chế độ dao động trong hệ phi tuyến Khảo sát chế độ dao động trong hệ phi tuyến - - Thí dụ 2 Thí dụ 2 Xét hệ phi tuyến có sơ ... Vậy dao động trong hệ là: )58.1sin(90.13)( tty = 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 60 Khảo sát chế độ dao động trong hệ phi tuyến Khảo sát c...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 9 pot
... hệ phi tuyến phương trình trạng thái: ),( uxfx = & (1) Định lý: Nếu hệ thống tuyến tính hóa (2) ổn định thì hệ phi tuyến (1) ổn định tiệm cận tại điểm cân bằng x e . Nếu hệ thống tuyến ... uxfx = & Xét hệ phi tuyến mô tả bởi phương trình trạng thái sau: 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 69 O O Å Å n n đ đ ịnh Lyapunov ịnh...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 10 potx
... ,0)( V iii) 0 ,0)( ≠∀< xxV & Thì hệ thống (1) ổn định Lyapunov tại điểm 0. Giả sử hệ thống có điểm cân bằng x e = 0. Định lý ổn định Lyapunov: Cho hệ phi tuyến không kích thích mô tả bởi ... cân bằng x e = 0. Định lý không ổn định: Cho hệ phi tuyến không kích thích mô tả bởi phương trình trạng thái: 0 ),( = = u uxfx & (1) 26 September 20 06 © H. T....
Ngày tải lên: 08/08/2014, 00:20