nhận dạng hệ thống điều khiển

NHẬN DẠNG hệ THỐNG ACROBOT
... các hệ thống hụt. Đây là một hệ thống phi tuyến rất khó điều khiển. Có thể sử dụng hệ thống này như một đối tượng để thử nghiệm các lý thuyết điều khiển điển kinh điển cũng như lý thuyết điều ... phương pháp nhận dạng hệ thống acrobat, Lựa chọn được một mô hình toán học cho hệ thống acrobot Nhận dạng động cơ điểu khiển ở Thanh 2 sử dụng Công cụ nhận dạng System Identtifcation ... ) nhận dạng được theo phương pháp bị động * Nhận dạng tham số mô hình ARMA - Nhận dạng chủ động tham số mô hình AR - Nhận dạng chủ động tham số mô hình MA - Nhận dạng chủ
Ngày tải lên: 15/08/2015, 15:53

NHẬN DẠNG HỆ THỐNG ĐIỀU KHIỂN
... thực nghiệm gọi nhận dạng hệ thống điều khiển Như vậy, khái niệm nhận dạng hệ thống điều khiển hiểu bổ sung cho việc mô hình hóa đối tượng mà lượng thông tin ban đầu đối tượng điều khiển không đầy ... Lời nói đầu Nhận dạng hệ thống công việc phải thực giải toán Điều khiển Tự động Lý đơn giản phân tích, tổng hợp hệ thống mô hình toán học mô tả hệ thống Trong trình xây dựng mô hình hệ thống phương ... nhận dạng cho trường hợp s>2nb 4.4 Nhận dạng chủ động tham số mô hình ARMA 4.4.1 Nhận dạng tham số AR mô hình ARMA 4.4.2 Nhận dạng tham số MA mô hình ARMA 4.4.3 Thuật toán nhận dạng
Ngày tải lên: 16/05/2016, 04:23

Nhận dạng hệ thống điều khiển lò hơi trong vòng kín
... nghiệp, đặc biệt nhà máy nhiệt điện Hầu hết hệ thống điều khiển lò xây dựng dựa vòng điều khiển đơn, dẫn tới chất lượng điều khiển hạn chế tương tác vòng điều khiển Bên cạnh đó, nhà máy nhiệt điện ... nghiên cứu mô hình cho điều khiển lò hơi, người ta quan tâm tới hệ thống hệ sinh nhiệt (buồng lửa, đường nhiên liệu khói thải) hệ nhận nhiệt để sinh (hệ hơi-nước), hệ thống lại bao gồm thành ... kín còn được gọi là nhận dạng cho điều khiển [21, 61] v(k) r(k) - Bộ điều khiển u(k) Đối tượng + + y(k) Hình 3.1 Hệ thống trong vòng kín Để nhận dạng thành công một
Ngày tải lên: 07/09/2016, 10:27

Nhận dạng hệ thống điều khiển lò hơi trong vòng kín
... Ly NHẬN DẠNG HỆ THỐNG ĐIỀU KHIỂN LỊ HƠI TRONG VỊNG KÍN LUẬN ÁN TIẾN SĨ ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA HÀ NỘI – 2016 BỘ GIÁO DỤC VÀ ĐÀO TẠO TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ NỘI Trịnh Thị Khánh Ly NHẬN DẠNG ... NỘI Trịnh Thị Khánh Ly NHẬN DẠNG HỆ THỐNG ĐIỀU KHIỂN LỊ HƠI TRONG VỊNG KÍN Chuyên ngành: Kỹ thuật điều khiển tự động hóa Mã số: 62520216 LUẬN ÁN TIẾN SĨ ĐIỀU KHIỂN VÀ TỰ ĐỘNG HĨA NGƯỜI HƯỚNG ... CHƯƠNG 35 CHƯƠNG 3: NHẬN DẠNG MƠ HÌNH LTI CỤC BỘ 36 3.1 Nhận dạng mơ hình lò vòng kín: khó khăn thách thức 36 3.2 Giới thiệu chung nhận dạng hệ thống vòng kín 39 3.2.1 Phương
Ngày tải lên: 04/11/2018, 23:08

Nhận dạng hệ thống acrobot
... acrobot………………………………… 31 3.4 Nhận dạng động điều khiển thứ hai…………………… 33 3.4.1 Các phương pháp nhận dạng hệ tuyến tính……………………… 33 3.4.2 Nhận dạng tham số mơ hình ARMA……………………………… 34 3.4.2.1 Nhận dạng bị động ... Acrobot ví dụ tiêu biểu cho hệ thống hụt (số đầu vào điều khiển nhỏ bậc mơ hình) Đây hệ thống phi tuyến khó điều khiển, sử dụng làm đối tượng thử nghiệm cho thuật toán điều khiển phi tuyến Thấy tầm ... đúng, hệ số tử chưa xác Điều tín hiệu mẫu bị ảnh hưởng nhiễu mà chưa xác định Kết luận Chương III tìm hiểu phương pháp nhận dạng hệ thống acrobat, Lựa chọn mô hình tốn học cho hệ thống acrobot Nhận
Ngày tải lên: 13/02/2019, 09:46

Nhận dạng hệ thống điều khiển nguyễn doãn phước, phan xuân minh
... nghiệm dó gọi nhận dạng hệ thống điểu khiến Nhừ vậy, khái niệm nhận dạng hệ thống điều khiển hiểu bố sung cho việc mơ hình hóa đối tượng mà lượng thông tin ban đầu đối tượng điều khiển khống đầy ... hận dạng hệ thống công việc phải thực giải toán Điều khiển Tự động Lý đơn giản vi khơng thê phân tích, tổng hợp hệ thống khơng có mơ hình tốn học mơ tả hệ thống Trong q trình xây dựng mó hình hệ ... khoảng từ năm 1990 trở lại đánh dấu nhận dạng mơ hình động học liên tục phi tuyến nhận dạng mơ hình tham sơ cho hệ nhiều chiều, hướng nghiên cứu xét tính nhận dạng hệ nhiều chiều Dần dần, củng giai
Ngày tải lên: 17/02/2021, 11:00
Nhận dạng hệ thống điều khiển
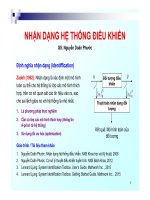
... NHẬN DẠNG HỆ THỐNG ĐIỀU KHIỂN GS Nguyễn Doãn Phước Định nghĩa nhận dạng (identiffication) Zadeh (1962): Nhận dạng xác định mơ hình tốn cụ thể cho hệ thống từ lớp mơ hình ... nhận dạng đối tượng Kết quả: Mơ hình tốn đối tượng Giáo trình / Tài liệu tham khảo Nguyễn Doãn Phước: Nhận dạng hệ thống điều khiển NXB Khoa học Kỹ thuật, 2006 Nguyễn Dỗn Phước: Cơ sở lý thuyết điều ... với hệ thống nhỏ Là phương pháp thực nghiệm Cần có lớp mơ hình thích hợp (thơng tin A-priori từ hệ thống) Sử dụng tối ưu hóa (optimization) u Đối tượng điều khiển uk N0 y yk N0 Thuật toán nhận
Ngày tải lên: 15/02/2022, 19:03

Nhận dạng hệ thống điều khiển lò hơi trong vòng kín702
... Ly NHẬN DẠNG HỆ THỐNG ĐIỀU KHIỂN LỊ HƠI TRONG VỊNG KÍN LUẬN ÁN TIẾN SĨ ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA HÀ NỘI – 2016 BỘ GIÁO DỤC VÀ ĐÀO TẠO TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ NỘI Trịnh Thị Khánh Ly NHẬN DẠNG ... NỘI Trịnh Thị Khánh Ly NHẬN DẠNG HỆ THỐNG ĐIỀU KHIỂN LỊ HƠI TRONG VỊNG KÍN Chuyên ngành: Kỹ thuật điều khiển tự động hóa Mã số: 62520216 LUẬN ÁN TIẾN SĨ ĐIỀU KHIỂN VÀ TỰ ĐỘNG HĨA NGƯỜI HƯỚNG ... CHƯƠNG 35 CHƯƠNG 3: NHẬN DẠNG MƠ HÌNH LTI CỤC BỘ 36 3.1 Nhận dạng mơ hình lị vịng kín: khó khăn thách thức 36 3.2 Giới thiệu chung nhận dạng hệ thống vịng kín 39 3.2.1 Phương
Ngày tải lên: 12/03/2022, 03:21

Nhận dạng hệ thống điều khiển lò hơi trong vòng kín703
... - TRỊNH THỊ KHÁNH LY NHẬN DẠNG HỆ THỐNG ĐIỀU KHIỂN TRONG VỊNG KÍN Chun ngành: Kỹ thuật điều khiển tự độn Mã số: 62520216 TÓM TẮT LUẬN ÁN TIẾN SĨ ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA Hà Nội – 2016 ... Sơn (2011) hệ kín q trình nhiệt lò hơ máy đạm Phú Mỹ Hội nghị tồn quốc Điề Tự động hố – VCCA, trang 74-80 Phản biện 1: GS.TSKH Nguyễn Phùng Quang [2] Trịnh Thị Khánh Ly (2012) Nhận dạng phi tập ... Hoàng Minh Sơn (201 closed-loop identification of steam boiler us space predictor model Chuyên san Điều động hóa, Số 13, trang 30-35 Luận án bảo vệ trước Hội đồng đánh giá luận án tiến sĩ cấp Trường
Ngày tải lên: 12/03/2022, 03:22

Nhận dạng hệ thống điều khiển
... thực nghiệm gọi nhận dạng hệ thống điều khiển Như vậy, khái niệm nhận dạng hệ thống điều khiển hiểu bổ sung cho việc mơ hình hóa đối tượng mà lượng thông tin ban đầu đối tượng điều khiển khơng đầy ... Nhận dạng hệ thống công việc phải thực giải toán Điều khiển Tự động Lý đơn giản khơng thể phân tích, tổng hợp hệ thống khơng có mơ hình tốn học mơ tả hệ thống Trong q trình xây dựng mơ hình hệ ... toán nhận dạng cho trường hợp s>2nb 4.4 Nhận dạng chủ động tham số mơ hình ARMA 4.4.1 Nhận dạng tham số AR mơ hình ARMA 4.4.2 Nhận dạng tham số MA mơ hình ARMA 4.4.3 Thuật tốn nhận dạng
Ngày tải lên: 22/10/2022, 10:17

Nhận dạng hệ thống acrobot
... acrobot………………………………… 31 3.4 Nhận dạng động điều khiển thứ hai…………………… 33 3.4.1 Các phương pháp nhận dạng hệ tuyến tính……………………… 33 3.4.2 Nhận dạng tham số mơ hình ARMA……………………………… 34 3.4.2.1 Nhận dạng bị động ... Acrobot ví dụ tiêu biểu cho hệ thống hụt (số đầu vào điều khiển nhỏ bậc mơ hình) Đây hệ thống phi tuyến khó điều khiển, sử dụng làm đối tượng thử nghiệm cho thuật toán điều khiển phi tuyến Thấy tầm ... thiện mơ hình hệ thống acrobot trường Đại học Kỹ thuật Công nghiệp Thái Nguyên - Lựa chọn mơ hình tốn học cho hệ thống acrobot - Đã nhận dạng động điểu khiển Thanh sử dụng Công cụ nhận dạng System
Ngày tải lên: 25/03/2021, 00:21

Nhận dạng hệ thống điều khiển155
... thực nghiệm gọi nhận dạng hệ thống điều khiển Như vậy, khái niệm nhận dạng hệ thống điều khiển hiểu bổ sung cho việc mơ hình hóa đối tượng mà lượng thông tin ban đầu đối tượng điều khiển không đầy ... Nhận dạng hệ thống công việc phải thực giải toán Điều khiển Tự động Lý đơn giản khơng thể phân tích, tổng hợp hệ thống khơng có mơ hình tốn học mơ tả hệ thống Trong q trình xây dựng mơ hình hệ ... toán nhận dạng cho trường hợp s>2nb 4.4 Nhận dạng chủ động tham số mơ hình ARMA 4.4.1 Nhận dạng tham số AR mơ hình ARMA 4.4.2 Nhận dạng tham số MA mơ hình ARMA 4.4.3 Thuật tốn nhận dạng
Ngày tải lên: 11/03/2022, 16:35

Nhận dạng hệ thống acrobot
... acrobot………………………………… 31 3.4 Nhận dạng động điều khiển thứ hai…………………… 33 3.4.1 Các phương pháp nhận dạng hệ tuyến tính……………………… 33 3.4.2 Nhận dạng tham số mơ hình ARMA……………………………… 34 3.4.2.1 Nhận dạng bị động ... Acrobot ví dụ tiêu biểu cho hệ thống hụt (số đầu vào điều khiển nhỏ bậc mơ hình) Đây hệ thống phi tuyến khó điều khiển, sử dụng làm đối tượng thử nghiệm cho thuật toán điều khiển phi tuyến Thấy tầm ... thiện mơ hình hệ thống acrobot trường Đại học Kỹ thuật Công nghiệp Thái Nguyên - Lựa chọn mô hình tốn học cho hệ thống acrobot - Đã nhận dạng động điểu khiển Thanh sử dụng Công cụ nhận dạng System
Ngày tải lên: 18/10/2023, 10:56

Bài giảng hệ thống điều khiển số - Động cơ không đồng bộ 3 pha.pdf
... dụng bộ điều khiển tốc độ động cơ Hệ thống điều khiển số động cơ không đồng bộ ba pha Bộ biến tần (21 tiết) (42 tiết) Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B Chöông 2: Hệ qui ... góc pha ban đầu θ o = 0 và tần số điều rộng xung là 20KHz. Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B 2/7/2007 3 CHƯƠNG TRÌNH MÔN HỌC HỆ THỐNG ĐIỀU KHIỂN SỐ Chương 1: Bộ nghịch ... cơ trong HTĐ từ thông rotor (Ψ r ). Chương 4: Điều khiển định hướng từ thông (FOC) ĐCKĐB (6T) Điều khiển PID Điều khiển tiếp dòng. Điều khiển tiếp áp. Mô phỏng của FOC. (21 tiết)...
Ngày tải lên: 20/08/2012, 09:57

Chap2-On dinh cua cac he thong dieu khien so.pdf
... Routh-Hurwitz có dạng nh sau: Chơng 2 ổn định của hệ thống điều khiển số Trong chơng này, chúng ta sẽ quan tâm đến một số kỹ thuật cơ bản đợc dùng để phân tích ổn định các hệ thống điều khiển số. ... sẽ tìm hiểu cách xây dựng quỹ tích gốc của các hệ thống điều khiển rời rạc qua các ví dụ. Cho hàm truyền của một hệ thống điều khiển kín có dạng nh sau: ( ) ( ) 1 G z GH z+ Chúng ... định của hệ thống. Tơng tự đối với các hệ thống rời rạc, mặt phẳng z đợc dùng để khảo sát ổn định của hệ thống. Trong phần này chúng ta sẽ xét đến quan hệ tơng đơng giữa mặt phẳng p của hệ liên...
Ngày tải lên: 20/08/2012, 10:27

Công nghệ hướng đối tượng trong điều khiển phân tán trong hệ thống điều khiển phân tán.pdf
... Công nghệ hướng đốitượng trong ĐKPT © 2005 - HMS Chương 8: Công nghệ₫ốitượng trong ₫iềukhiểnphân tán 8.1 Qui trình công nghệ phầnmềm 8.2 Công nghệđốitượng là gì 8.3 Ngôn ngữ mô hình hóa thống ... MINH SƠN Chương 1Chương 1 Hệ thống ₫iềukhiểnphân tán 13.09.06 Chương 8: Công nghệ hướng ₫ối tượng trong ₫iềukhiểnphântán 50 © 2004, HOÀNG MINH SƠN Chương 8: Công nghệ hướng đốitượng trong ĐKPT © ... Công nghệ hướng đốitượng trong ĐKPT © 2005 - HMS Ví dụ: Hệ thống ₫iều khiển Process Controller A B z -1 C Sensor Actuator u y w - 20 © 2004, HOÀNG MINH SƠN Chương 8: Công nghệ hướng...
Ngày tải lên: 20/08/2012, 11:04

Chuẩn IEC 61131-3 trong hệ thống điều khiển phân tán.pdf
... yếu tố điều khiển thực thi z Các ký hiệu nhảy z Các ký hiệu kết thúc Lựa chọn ngôn ngữ phù hợp: – LD cho mạch điều khiển logic – FBD cho điều khiển tương tự (ĐK quá trình) và điều khiển logic – ... nhiệm vụ điều khiển –Lập trình có cấu trúc –Các lệnh điều khiển chương trình (IF, WHILE, FOR, ) Nhược điểm: Mã chậm, lớn –Phụ thuộc nhiều vào chất lượng của trình biên dịch – Không phải hệ PLC/DCS ... Chart (SFC) Step: Một bước thực hiện trong điều khiển trình tự –Cóthể bao gồm nhiều hành động đi kèm – Có ít nhất một bước tích cực –Trạng thái hệ thống được xác định qua các bước tích cực ...
Ngày tải lên: 20/08/2012, 11:04
Độ tin cậy và tính sẵn sàng trong các hệ thống điều khiển và giám sát.pdf
... thuật. 9 C C á á c c t t ì ì nh nh hu hu ố ố ng ng "chuy "chuy ể ể n n m m ạ ạ ch ch " " z Lỗiphầncứng bộ điều khiển tích cực z Lỗitruyền thông giữabộđiềukhiển tích cực và các I/O z Lỗi liên kết truyền thông giữabộđiềukhiển tích cực với mạng điều khiển z Tách bộ điều khiển tích cực ... nguồn cho bộ điều khiển tích cực z Lỗi bộ nhớ của bộ điều khiển z Lỗi phần mềm "treo" (phát hiện thông qua cơ chế watchdog và ngắt ngoại lệ). 02/11/2006 © HMS - BM ĐIỀU KHIỂN TỰ ĐỘNG, ... và kiểm soát các quyền –Sửa đổi chương trình, chẩn đoán hệ thống –Truy nhập màn hình –Truy nhập dữ liệu – Điều khiển (đặt giá trị) –Xác nhận và xóa cảnh báo/báo động z Đặt chế độ bảo mật –Theo...
Ngày tải lên: 20/08/2012, 11:04

Hệ thống điều khiển giám sát.pdf
... động – Điềukhiển cao cấp –Quảnlý& lưu trữ dữ liệu quá trình z Hệ thống điềukhiển giám sát: Thành phần quan trọng của một hệ thống tựđộng hóa hiện đại 19 Giao diện người-máy z Sơ đồ khối (hệ thống) : ... 27/09/2005 © HMS - BM ĐIỀU KHIỂN TỰ ĐỘNG, ĐHBK HÀ NỘI HỆ THỐNG ĐIỀU KHIỂN GIÁM SÁT 13 Quan điểmmớivề hệ SCADA z Trọng tâm là hệ thống phần mềm – Các công cụ phát triển, tạo ... Tất cả các chức năng điều khiển phía trên điều khiển tự động, có sự tham gia giám sát của con người z Các chứcnăng điềukhiển giám sát tiêu biểu: –Giám sát vận hành – Điều khiển vận hành – Báo...
Ngày tải lên: 20/08/2012, 11:04

Kiến trúc FCS trong hệ thống điều khiển phân tán.pdf
... HMS 6.2 Cấutrúchệ thống Điềukhiển phân tán triệt để sử dụng công nghệ bus trường Giao tiếptrựctiếpgiữa các thiếtbị trường Môi trường phát triểntíchhợp: điềukhiểnvàtruyền thông Bộđiềukhiểnthựchiệnchứcnăng phốihợphoặc ... HOÀNG MINH SƠN Chương 6: KiếntrúcFCS © 2005 - HMS Điềukhiển phân tán chưatriệt để –Chứcnăng điềukhiểnvẫntập trung ở bộđiềukhiển –Hiệunăng củahệ thống chưacao – Kém linh hoạt trong thay đổichương ... HMS Chương 6: KiếntrúcFCS 6.1 Các vấn đề củakiếntrúcDCS/PLC 6.2 Cấu trúc hệ thống 6.3 Phân bố chức năng điều khiển 6.4 Phát triển hệ thống 6.5 Tóm tắt các ưu điểm chính 3 © 2004, HOÀNG MINH SƠN Chương...
Ngày tải lên: 20/08/2012, 11:05
Bạn có muốn tìm thêm với từ khóa: