cách điều khiển trực thăng mô hình

XÂY DỰNG hệ THỐNG điều KHIỂN TRỰC THĂNG KHÔNG NGƯỜI lái GIẢ lập BẰNG mô HÌNH kết hợp GA – FL
Ngày tải lên: 04/08/2013, 16:09

Báo cáo nghiên cứu khoa học: "Cảm biến tốc độ lâp động cơ cảm ứng trong bộ điều khiển trực tiếp mô-men xoắn"" pdf
... pháp ước lượng vận tốc mạch hồi tiếp. Điều khiển thích ứng mô hình được dùng trong phương pháp ước lượng vận tốc mạch hồi tiếp. Đi ều khiển thích ứng mô hình cho phép giảm tối thiểu ảnh hưởng ... quả mô phỏng của hai phương pháp trên sẽ được so sánh. Để kết quả mô phỏng bám sát thực tế,các mạch tích phân trong bộ điều khiển sẽ được thay thế bởi các mạch lọc t ần số thấp trong các mô ... (figure 11). ƯỚC LƯỢNG VẬN TỐC ĐỘNG CƠ KHÔNG DÙNG CẢM BIẾN TRONG HỆ THỐNG ĐIỀU KHIỂN TRỰC TIẾP MOMENT Phạm Đình Trực (1) , Hoàng Đăng Khoa (2) (1)Trường Đại học Bách khoa, ĐHQG-HCM (2)Trường...
Ngày tải lên: 22/07/2014, 10:21

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 1 doc
... September 2006 â H. T. Hong - éHBK TPHCM 1 LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG Giảng viên: TS. Huỳnh Thái Hoàng Bộ môn Điều Khiển Tự Động Khoa Điện – Điện Tử Đại học Bách Khoa ... 4 Khái niệm về mô hình toán học Khái niệm về mô hình toán học 26 September 2006 â H. T. Hong - éHBK TPHCM 7 Một số thí dụ mô tả hệ thống bằng phương trình vi phân Một số thí dụ mô tả hệ thống ... dạng mô tả toán học khác giúp phân tích và thiết kế hệ thống tự động dể dàng hơn. Hàm truyền Phương trình trạng thái Hạn chế của mô hình toán dưới dạng phương trình vi phân Hạn chế của mô hình...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 2 pdf
... Hong - éHBK TPHCM 19 Mạch tích phân bậc 1: Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh) Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh) Các khâu hiệu chỉnh thụ động R C 1 1 )( + = RCs sG R C ... September 2006 â H. T. Hong - éHBK TPHCM 20 Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh) Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh) Các khâu hiệu chỉnh thụ động (tt) 1= C K CRRT ... Điều khiển tự động. < ≥ == 0 t 0 0 t sin )().(sin)( nếu nếut tuttf ω ω f(t) t 0 {} 22 )()(sin ω ω ω + = s tutL 26 September 2006 â H. T. Hong - éHBK TPHCM 20 Hàm truyền của các bộ điều...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 3 pps
... 26 September 2006 â H. T. Hong - éHBK TPHCM 22 Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh) Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh) Các khâu hiệu chỉnh tích cực (tt) Khâu vi ... 26 September 2006 â H. T. Hong - éHBK TPHCM 21 Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh) Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh) Các khâu hiệu chỉnh tích cực P KsG = )( Khâu...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 4 docx
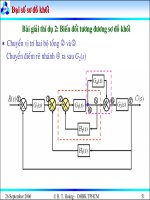
... T. Hong - éHBK TPHCM 34 Đại số sơ đồ khối Đại số sơ đồ khối Sơ đồ khối của một hệ thống là hình vẽ mô tả chức năng của các phần tử và sự tác động qua lại giữa các phần tử trong hệ thống. Sơ...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 5 potx
Ngày tải lên: 07/08/2014, 23:24
Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 6 pps
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 7 pot
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 8 potx
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 9 pps
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 10 ppt
Ngày tải lên: 07/08/2014, 23:24

nghiên cứu điều khiển nồng độ của sản phẩm trong bể chứa phản ứng có khuấy bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu
Ngày tải lên: 04/10/2014, 06:36


ĐIỀU KHIỂN TRỰC TIẾP MOMEN ĐỘNG CƠ KHÔNG ĐỒNG BỘ VỚI BỘ ĐIỀU KHIỂN MỜ ỨNG DỤNG DSP DS1104
... yêu cầu (hình 2c) về cơ bản vẫn đảm bảo nguyên lý của ph$ơng pháp ICCP. Hình 3 trình by sơ đồ nguyên lý nối mạch của hệ điện cực bảo vệ theo ph$ơng pháp ICCP. R S R C R A C C C A E Hình 3: ... sắt-silic l,m việc trong các môi tr/ờng xâm thực Cl - Hình 4 v 5 trình by ảnh kim t$ơng đại diện của các mẫu hợp kim nghiên cứu v phổ EIS t$ơng ứng đo trong các môi tr$ờng NaCl 3,5% v 1,2%. ... ch$a biến tính đồng thời cũng l điển hình cho thép công trình sẽ l đối t$ợng cần bảo vệ. Nhìn chung, thép cacbon trong môi tr$ờng xâm thực Cl - dễ bị ăn mòn, hình thnh lớp thụ động có R P khá...
Ngày tải lên: 26/04/2013, 08:26

ĐIỀU KHIỂN TRỰC TIẾP MOMEN ĐỘNG cơ KHÔNG đồng bộ với bộ điều khiển mờ ứng dụng DSP
... DTC là có thể thực hiện một bộ điều khiển logic mờ dựa trên bộ điều khiển hệ số làm việc,nơi hệ số làm việc tốt nhất được quyết định mỗi chu kỳ lấy mẫu. Bộ điều khiển mờ được thiết kế dựa trên ... mạch của momen. Hình 4.1 Các kết quả mô phỏng: DTC khi chưa và đã có bộ điều khiển mờ 5. Kết luận Hệ thống DTC với cải tiến thêm các khâu điều chỉnh có thêm bộ điều chỉnh logic mờ đã ... việc giao tiếp giữa hệ thống chương trình điều khiển mềm với đối tượng điều khiển bên ngoài. Trong những bài toán lớn, phần cứng có thể có nhiều mô đun ghép nối với nhau, có thể kết nối thành...
Ngày tải lên: 11/03/2014, 15:28

BÁO CÁO " Tự do hóa thương mại và đầu tư trực tiếp nước ngoài tại Việt Nam: Một cách tiếp cận thông qua mô hình Lực hấp dẫn và Phương pháp ước lượng Hausman - Taylor " ppt
... hóa thương mại và đầu tư trực tiếp nước ngoài tại Việt Nam: Một cách tiếp cận thông qua mô hình Lực hấp dẫn và Phương pháp ước lượng Hausman - Taylor TÓM TẮT Đầu tư trực tiếp nước ngoài (FDI) ... và các hiệp định thương mại tự do khu vực (FTAs) tới việc thu hút vốn FDI, tác giả đã xây dựng mô hình Lực hấp dẫn (Gravity model), sử dụng dữ liệu bảng (panel data) trong giai đoạn 1995-2011 ... vốn FDI, một số khuyến nghị cũng được đề xuất trong nghiên cứu. Từ khóa: FDI, FTA, tác động, mô hình lực hấp dẫn, phương pháp Hausman - Taylor, Việt Nam, WHO. 1. INTRODUCTION FDI has a positive...
Ngày tải lên: 02/04/2014, 13:20

Kiểu dữ liệu, cấu trúc và mô hình dữ liệu
... trên các đối tợng của mô hình. Một mô hình toán học cùng với các phép toán có thể thực hiện trên các đối tợng của mô hình đợc gọi là mô hình dữ liệu. Chẳng hạn, trong mô hình dữ liệu đồ thị, ... nh sau 1. Xây dựng các mô hình dữ liệu mô tả bài toán. Thiết kế thuật toán bằng cách sử dụng các thao tác, các phép toán trên các mô hình dữ liệu. 2. Biểu diễn các mô hình dữ liệu bởi các cấu ... một số mô hình dữ liệu quan trọng nhất, đợc sử dụng thờng xuyên trong các thuật toán. Đó là các mô hình dữ liệu danh sách, cây, tập hợp. Với mỗi mô hình dữ liệu chúng ta nghiên cứu các cách...
Ngày tải lên: 21/08/2012, 15:43

Nghiên cứu hệ điều khiển thích nghi mờ và ứng dụng cho hệ truyền động có khe hở
... (2.5) 2.3 MÔ HÌNH HỆ PHI TUYẾN 2.3.1. Mô hình tĩnh Xây dựng mô hình cho hệ thống là thiết lập mô hình toán học mô tả ánh xạ T : u(t) y(t) Mô hình tĩnh của hệ phi tuyến là mô hình có quan ... phương pháp điều khiển thích nghi gián tiếp Hình 3.3 Điều khiển thích nghi có mô hình theo dõi Hình 3.4 Sơ đồ cấu trúc bộ điều khiển mờ thích nghi Hình 3.5 Hàm liên thuộc với 7 tập mờ Hình 3.6 ... của bộ điều khiển mờ Hình 3.19 Sơ đồ mô phỏng hệ tru yền động có khe hở với bộ điều khiển PID và bộ điều khiển mờ theo luật PI Hình 3.20 Sơ đồ khối của khối luật mờ Hình 3.21 Kết quả mô phỏng...
Ngày tải lên: 06/11/2012, 12:00