MÔ HÌNH TOÁN HỌC HỆ BỒN NƯỚC VÀ CÁC PHƯƠNG PHÁP ĐIỀU KHIỂN

CẤU TẠO PHẦN CỨNG VÀ CÁC PHƯƠNG PHÁP ĐIỀU KHIỂN TRONG ROBOT TỰ HÀNH
... 18 Robot tự hành PHẦN CẤU TẠO PHẦN CỨNG VÀ CÁC PHƯƠNG PHÁP ĐIỀU KHIỂN TRONG ROBOT TỰ HÀNH http://www.ebook.edu.vn Một số sensor thường dùng robot tự hành Mạch điều khiển robot Khối nguồn Khối điều ... robot tự hành Đặt vấn đề Bài toán tìm đường cục Bài toán tìm đường toàn cục 13 PHẦN CẤU TẠO PHẦN CỨNG VÀ CÁC PHƯƠNG PHÁP ĐIỀU KHIỂN TRONG ROBOT TỰ HÀNH ... Như...
Ngày tải lên: 25/04/2013, 13:45

Tài liệu Động cơ điện một chiều và các phương pháp điều khiển tốc độ docx
... t tng ng Cỏc ng c PM c o chiu quay mt cỏch n gin bi chuyn mch mômen xoắn dòng điện mômen khởi động (Ts) tốc độ tốc độ không tải( ) mômen xoắn max Hỡnh I-1 th quan h mụ men xon-tc ca ng c S iu ... cựng kớch thc IA IL dòng điện (I L) mômen xoắn cuộn kích V tốc độ chạy phá hỏng tốc độ mômen xoắn Hỡnh I-4 S ng c kớch t ni tip v ng c trng mụ men xon- tc IA IL dòng điện (I L...
Ngày tải lên: 12/12/2013, 19:16

MÔ HÌNH TOÁN HỌC HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC
... Chương MÔ HÌNH TOÁN HỌC HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC 26 September 2006 © H T Hồng - ÐHBK TPHCM Nội dung chương ỉ ỉ ỉ ỉ Khái niệm mô hình toán học Hàm truyền Ø Phép biến đổi ... mô hình toán học 26 September 2006 © H T Hồng - ÐHBK TPHCM Khái niệm mô hình toán học ỉ ỉ ỉ Hệ thống điều khiển thực tế đa dạng có chất vật lý khác Cần có sở chung để phân tích, thiết kế...
Ngày tải lên: 14/10/2013, 16:29

Tài liệu MÔ HÌNH TOÁN HỌC HỆ THỐNG ĐỊNH VỊ ĐỘNG HỌC TÀU THỦY pdf
... trắng Gaussian Kết mô hình toán học tàu nhiễu môi trường mô tả mô hình không gian trạng thái sau: w nhiễu đối tượng (nhiễu môi trường); A, B E ma trận hệ số cho mô hình toán học trên; H ma trận ... khối lượng tác động thủy động học) giả thiết xác định dương M = MT với tàu định vị động học xem vectơ tốc độ tức thời U » 0; D > ma trận xác định dươn...
Ngày tải lên: 14/12/2013, 01:17

LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG - CHƯƠNG 2 MÔ HÌNH TOÁN HỌC - HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC doc
... Chương MÔ HÌNH TOÁN HỌC HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC February 20 06 © H T Hồng - ÐHBK TPHCM Nội dung chương ỉ ỉ ỉ ỉ Khái niệm mô hình toán học Hàm truyền Ø Phép biến ... 20 06 © H T Hồng - ÐHBK TPHCM Khái niệm mô hình toán học February 20 06 © H T Hồng - ÐHBK TPHCM Khái niệm mô hình toán học ỉ ỉ ỉ Hệ thống điều khiển thực tế đa dạng có chất v...
Ngày tải lên: 26/07/2014, 06:21

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 1 doc
... thiết kế hệ thống điều khiển có chất vật lý khác Cơ sở toán học Quan hệ tín hiệu vào tín hiệu hệ thống tuyến tính bất biến liên tục mô tả phương trình vi phân tuyến tính hệ số hằng: r(t) Hệ thống ... biến liên tục c(t) d n c(t ) d n−1c(t ) dc(t ) d m r (t ) d m−1r (t ) dr (t ) + a1 + L + an 1 + an c(t ) = b0 a0 + b1 + L + bm 1 + bm r (t ) n n 1 m m 1 dt d...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 2 pdf
... lục sách Lý thuyết Điều khiển tự động 26 September 20 06 © H T Hồng - ÐHBK TPHCM 15 Đònh nghóa hàm truyền Xét hệ thống mô tả phương trình vi phân: r(t) Hệ thống tuyến tính bất biến liên tục c(t) ... truyền điều khiển (khâu hiệu chỉnh) Các khâu hiệu chỉnh thụ động (tt) C Mạch sớm pha: R1 R2 KC = R1 + R2 Mạch trể pha: R2 R2 R1C T= R1 + R2 R2 R1 C KC = 26 S...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 3 pps
... September 2006 − ω : tốc độ động − Mt : moment tải − B : hệ số ma sát − J : moment quán tính © H T Hồng - ÐHBK TPHCM 23 Hàm truyền đối tượng thường gặp (tt) Hàm truyền động DC (tt) Áp dụng đònh ... ⇔ G( s) = K Ts + M T= B © H T Hồng - ÐHBK TPHCM 29 Hàm truyền đối tượng thường gặp (tt) Hệ thống giảm xóc ô tô, xe máy M: khối lượng tác động lên bánh xe, B hệ số ma sát, K đ...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 4 docx
... - ÐHBK TPHCM 32 Hàm truyền hệ thống tự động 26 September 2006 © H T Hồng - ÐHBK TPHCM 33 Đại số sơ đồ khối Sơ đồ khối Sơ đồ khối hệ thống hình vẽ mô tả chức phần tử tác động qua lại phần tử hệ ... hệ thống đơn giản (tt) Hệ thống song song n Gss ( s ) = ∑ Gi ( s ) i =1 26 September 2006 © H T Hồng - ÐHBK TPHCM 36 Đại số sơ đồ khối Hàm truyền hệ thống...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 5 potx
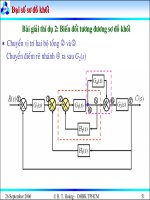
... 2006 © H T Hồng - ÐHBK TPHCM 46 Đại số sơ đồ khối Thí dụ Tính hàm truyền tương đương hệ thống có sơ đồ khối sau: 26 September 2006 © H T Hồng - ÐHBK TPHCM 47 Đại số sơ đồ khối Bài giải thí dụ ... TPHCM 49 Đại số sơ đồ khối Thí dụ Tính hàm truyền tương đương hệ thống có sơ đồ khối sau: 26 September 2006 © H T Hồng - ÐHBK TPHCM 50 ... )] Hàm truyền tương đương hệ thống...
Ngày tải lên: 07/08/2014, 23:24
Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 6 pps
... G1G2G3 + G1G3 H1 26 September 20 06 © H T Hồng - ÐHBK TPHCM 56 Đại số sơ đồ khối Thí dụ Tính hàm truyền tương đương hệ thống có sơ đồ khối sau: 26 September 20 06 © H T Hồng - ÐHBK TPHCM 57 Đại ... truyền tương đương hệ thống đơn giản Đối với hệ thống phức tạp ta có phương pháp hiệu hơn, phương pháp sơ đồ dòng tín hiệu đề cập đến mục 26 September 20 06 © H T Hồng...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 7 pot
... tương đương hệ thống: Gtd = ( P ∆1 + P2 ∆ + P3∆ ) ∆ Gtd = G1G2G3G4G5 + G1G6G4G5 + G1G2G7 (1 + G4 H1 ) + G4 H1 + G2G7 H + G6G4G5 H + G2G3G4G5 H + G4 H1G2G7 H 26 September 2006 © H T Hồng - ÐHBK TPHCM ... nhánh vòng kín 26 September 2006 © H T Hồng - ÐHBK TPHCM 62 Sơ đồ dòng tín hiệu Công thức Mason Hàm truyền tương đương từ nút nguồn đến nút đích hệ thống tự động biểu diễn s...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 8 potx
... điểm t > t0, ta hoàn toàn xác đònh đáp ứng hệ thống thời điểm t ≥ t0 Hệ thống bậc n có n biến trạng thái Các biến trạng thái chọn biến vật lý biến vật lý Vector trạng thái: n biến trạng thái hợp ... H T Hồng - ÐHBK TPHCM 73 Phương trình trạng thái Bằng cách sử dụng biến trạng thái, ta chuyển phương trình vi phân bậc n mô tả hệ thống thành hệ gồm n phương trình vi phân...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 9 pps
... trường hợp n=3: xem LT ĐKTĐ, trang 6 7-6 8 26 September 2006 © H T Hồng - ÐHBK TPHCM 85 Cách thành lập PTTT từ PTVP Thí dụ trường hợp Viết PTTT mô tả hệ thống có quan hệ vào cho PTVP sau: && & & 2&&&(t ... B = M 0 1 K 0 © H T Hồng - ÐHBK TPHCM 89 Thí dụ thành lập PTTT từ PTVP dùng PP tọa độ pha Viết PTTT mô tả hệ thống có quan hệ vào cho PTVP s...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 10 ppt
... xem Lý thuyết Điều khiển tự động Đáp ứng hệ thống? c(t ) = Cx(t ) Thí dụ: xem TD 2.15, Lý thuyết Điều khiển tự động 26 September 2006 © H T Hồng - ÐHBK TPHCM 97 Tóm tắt quan hệ dạng mô tả toán ... truyền hệ thống là: C (s) -1 G (s) = = C (sI − A ) B R( s) Chứng minh: xem LT ĐKTĐ, trang 78 26 September 2006 © H T Hồng - ÐHBK TPHCM 94 Tính hàm tru...
Ngày tải lên: 07/08/2014, 23:24