Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 10 ppt

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 1 doc
... phân =++++ − − − )( )()()( 1 1 1 10 tca dt tdc a dt tcd a dt tcd a nn n n n n L )( )()()( 1 1 1 10 trb d t tdr b d t trd b d t trd b mm m m m m ++++ − − − L 26 September 2006 © H. T. Hồng - ÐHBK TPHCM 1 LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG Giảng viên: TS. ... 4 Khái niệm về mô hình toán học Khái niệm về mô hình toán học 26 September 2006 © H. T. Hồng...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 2 pdf
... ở phụ lục sách Lý thuyết Điều khiển tự động. < ≥ == 0 t 0 0 t sin )().(sin)( nếu nếut tuttf ω ω f(t) t 0 {} 22 )()(sin ω ω ω + = s tutL 26 September 2006 © H. T. Hồng - ÐHBK TPHCM 20 Hàm ... của hệ thống. Do đó có thể dùng hàm truyền để mô tả hệ thống. Định nghóa hàm truyền (tt) Định nghóa hàm truyền (tt) nn nn mm mm asasasa bsbsbsb sR sC sG ++++ ++++ == − −...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 3 pps
... điện từ của động cơ hằng số thời gian điện cơ của động cơ 26 September 2006 © H. T. Hồng - ÐHBK TPHCM 22 Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh) Hàm truyền của các bộ điều khiển (khâu ... truyền: BMssF sV sG + == 1 )( )( )( ⇔ 1 )( + = Ts K sG với B K 1 = B M T = 26 September 2006 © H. T. Hồng - ÐHBK TPHCM 21 Hàm truyền của các bộ điều khiển (khâu hiệu chỉn...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 4 docx
... truyền của hệ thống tự động Hàm truyền của hệ thống tự động 26 September 2006 © H. T. Hồng - ÐHBK TPHCM 34 Đại số sơ đồ khối Đại số sơ đồ khối Sơ đồ khối của một hệ thống là hình vẽ mô tả chức ... tổng 26 September 2006 © H. T. Hồng - ÐHBK TPHCM 37 Đại số sơ đồ khối Đại số sơ đồ khối Hàm truyền của các hệ thống đơn giản (tt) Hệ thống hồi tiếp âm ...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 5 potx
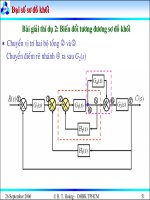
... sơ đồ khối Thí dụ 1 Thí dụ 1 Tính hàm truyền tương đương của hệ thống có sơ đồ khối như sau: 26 September 2006 © H. T. Hồng - ÐHBK TPHCM 42 Đại số sơ đồ khối Đại số sơ đồ khối Các phép biến ... rẽ nhánh : 26 September 2006 © H. T. Hồng - ÐHBK TPHCM 48 Đại số sơ đồ khối Đại số sơ đồ khối Bài giải thí dụ 1: Biến đổi tương đương sơ đồ khối Bài giải thí dụ 1: Biến đổi tương đ...
Ngày tải lên: 07/08/2014, 23:24
Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 6 pps
... các hệ thống phức tạp các phép tính này hay bị nhầm lẫn. ⇒ Phương pháp biến đổi tương đương sơ đồ khối chỉ thích hợp để tìm hàm truyền tương đương của các hệ thống đơn giản. Đối với các hệ thống ... pháp biến đổi sơ đồ khối là không mang tính hệ thống, mỗi sơ đồ cụ thể có thể có nhiều cách biến đổi khác nhau, tùy theo trực giác của người giải bài toán. Khi tính hàm t...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 7 pot
... từ một nút nguồn đến một nút đích của hệ thống tự động biểu diễn bằng sơ đồ dòng tín hiệu được cho bởi: ∑ ∆ ∆ = k kk PG 1 26 September 2006 © H. T. Hồng - ÐHBK TPHCM 64 Sơ đồ dòng tín hiệu Sơ ... Hồng - ÐHBK TPHCM 66 Sơ đồ dòng tín hiệu Sơ đồ dòng tín hiệu Thí dụ 2 Thí dụ 2 Tính hàm truyền tương đương của hệ thống có sơ đồ khối như sau: Giải: 26 September 2006 © H. T....
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 8 potx
... © H. T. Hồng - ÐHBK TPHCM 74 Bằng cách sử dụng các biến trạng thái, ta có thể chuyển phương trình vi phân bậc n mô tả hệ thống thành hệ gồm n phương trình vi phân bậc nhất, (hệ phương trình ... định được đáp ứng của hệ thống tại mọi thời điểm t ≥ t 0 . Hệ thống bậc n có n biến trạng thái. Các biến trạng thái có thể chọn là biến vật lý hoặc không phải là biến vật...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 9 pps
... T. Hồng - ÐHBK TPHCM 82 Cách thành lập PTTT từ PTVP Cách thành lập PTTT từ PTVP Thí dụ trường hợp 1 Thí dụ trường hợp 1 Viết PTTT mô tả hệ thống có quan hệ vào ra cho bởi PTVP sau: )() (10) (6)(5)(2 ... thái: = + = )()( )()()( ttc trtt Cx B A x x & −−− = −−− = 5.235 100 010 100 010 0 1 0 2 0 3 a a a a a a A trong đó...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 10 ppt
... Φ=Φ − L 1 )()( − −=Φ A I ss Trong đó: ma trận quá độ Thí dụ: xem TD 2.15, Lý thuyết Điều khiển tự động Đáp ứng của hệ thống? )()( tt Cx c = Chứng minh: xem Lý thuyết Điều khiển tự động ... thái: { )( 1 0 0 )( )( )( )( 001 110 0103 )( )( )( )( 3 2 1 3 2 1 tr t tx tx tx t tx tx tx B xAx + − − − = ...
Ngày tải lên: 07/08/2014, 23:24