Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 3 pps

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 1 doc
... phân =++++ − − − )( )()()( 1 1 1 10 tca dt tdc a dt tcd a dt tcd a nn n n n n L )( )()()( 1 1 1 10 trb d t tdr b d t trd b d t trd b mm m m m m ++++ − − − L 26 September 2006 © H. T. Hồng - ÐHBK TPHCM 1 LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG Giảng viên: TS. Huỳnh Thái Hoàng Bộ môn Điều Khiển Tự Động Khoa Điện – Điện Tử Đại học ... 4 Khái niệm về mô hình t...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 2 pdf
... ở phụ lục sách Lý thuyết Điều khiển tự động. < ≥ == 0 t 0 0 t sin )().(sin)( nếu nếut tuttf ω ω f(t) t 0 {} 22 )()(sin ω ω ω + = s tutL 26 September 2006 © H. T. Hồng - ÐHBK TPHCM 20 Hàm ... H. T. Hồng - ÐHBK TPHCM 17 Hàm truyền của hệ thống: Định nghóa: Hàm truyền của hệ thống là tỉ số giữa biến đổi Laplace của tín hiệu ra và biến đổi Laplace của tín...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 3 pps
... điện từ của động cơ hằng số thời gian điện cơ của động cơ 26 September 2006 © H. T. Hồng - ÐHBK TPHCM 22 Hàm truyền của các bộ điều khiển (khâu hiệu chỉnh) Hàm truyền của các bộ điều khiển (khâu ... truyền: BMssF sV sG + == 1 )( )( )( ⇔ 1 )( + = Ts K sG với B K 1 = B M T = 26 September 2006 © H. T. Hồng - ÐHBK TPHCM 21 Hàm truyền của các bộ điều khiển (khâu hiệu chỉn...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 4 docx
... truyền của hệ thống tự động Hàm truyền của hệ thống tự động 26 September 2006 © H. T. Hồng - ÐHBK TPHCM 34 Đại số sơ đồ khối Đại số sơ đồ khối Sơ đồ khối của một hệ thống là hình vẽ mô tả chức ... Hồng - ÐHBK TPHCM 36 Đại số sơ đồ khối Đại số sơ đồ khối Hàm truyền của các hệ thống đơn giản (tt) Hệ thống song song ∑ = = n i iss sGsG 1 )()( 26 Sep...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 5 potx
... tiếp[G 2 (s),G A (s)]: )(1)( 1 sGsG B += )]()().[(1 )( )().(1 )( )( 432 2 2 2 sGsGsG sG sGsG sG sG A C −+ = + = Hàm truyền tương đương của hệ thống: )().()( sGsGsG CBtd = )]()().[(1 )()].(1[ )( 432 21 sGsGsG sGsG sG td −+ + = ... rẽ nhánh : 26 September 2006 © H. T. Hồng - ÐHBK TPHCM 48 Đại số sơ đồ khối Đại số sơ đồ khối Bài giải thí dụ 1: Biến đổi tương đương sơ đồ khối...
Ngày tải lên: 07/08/2014, 23:24
Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 6 pps
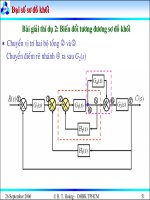
... Biến đổi tương đương sơ đồ khối 31 333 222 133 2 1 31 333 222 133 2 1 1 1 1 .1 1 . 1 * HHGHGGHG HGGG G HHGHGGHG HGGG G GG GG G E E td +++ + + +++ + = + = 131 32 131 333 222 131 321 1 HGGGGGHHGHGGHG HGGGGG G +++++ + =⇒ ... khối Bài giải thí dụ 2: Biến đổi tương đương sơ đồ khối Bài giải thí dụ 2: Biến đổi tương đương sơ đồ khối 3 22 133 2 22 133 2 3 1 1 1 1 * H HG HGGG HG...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 7 pot
... 2 (tt) Đường tiến: Vòng kín: 32 11 GGGP = 31 12 GHGP = 221 HGL − = 33 22 HGGL − = 32 13 GGGL − = 31 34 HHGL − = 131 5 HGGL − = 26 September 2006 © H. T. Hồng - ÐHBK TPHCM 66 Sơ đồ dòng tín hiệu Sơ ... tín hiệu Thí dụ 3 (tt) Thí dụ 3 (tt) 32 11 GGGP = 42 GP = 211 HGL − = 1212 HGGL − = 32 13 GGGL − = 33 24 HGGL − = 45 GL − = Đường tiến: Vòng kín: 26 September 2006 ©...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 8 potx
... © H. T. Hồng - ÐHBK TPHCM 74 Bằng cách sử dụng các biến trạng thái, ta có thể chuyển phương trình vi phân bậc n mô tả hệ thống thành hệ gồm n phương trình vi phân bậc nhất, (hệ phương trình ... định được đáp ứng của hệ thống tại mọi thời điểm t ≥ t 0 . Hệ thống bậc n có n biến trạng thái. Các biến trạng thái có thể chọn là biến vật lý hoặc không phải là biến vật...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 9 pps
... September 2006 © H. T. Hồng - ÐHBK TPHCM 82 Cách thành lập PTTT từ PTVP Cách thành lập PTTT từ PTVP Thí dụ trường hợp 1 Thí dụ trường hợp 1 Viết PTTT mô tả hệ thống có quan hệ vào ra cho bởi PTVP ... September 2006 © H. T. Hồng - ÐHBK TPHCM 86 Cách thành lập PTTT từ PTVP Cách thành lập PTTT từ PTVP Thí dụ trường hợp 2 Thí dụ trường hợp 2 Viết PTTT mô tả hệ thống có q...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 10 ppt
... Φ=Φ − L 1 )()( − −=Φ A I ss Trong đó: ma trận quá độ Thí dụ: xem TD 2.15, Lý thuyết Điều khiển tự động Đáp ứng của hệ thống? )()( tt Cx c = Chứng minh: xem Lý thuyết Điều khiển tự động ... (tt) () + = = 32 1 32 10 10 01 s s ss AI () + + = + = s s ss s s s 2 13 )1.(2 )3( 1 32 1 1 1 AI () [] [] 13 23 1 2 13 01 23...
Ngày tải lên: 07/08/2014, 23:24