tổng quan về quảng cáo adwords

Lý thuyết điều khiển tự động.doc
... nói hầu hết hệ thống vật lý hệ phi tuyến, có nghóa hệ thống có phần tử phần tử phi tuyến (quan hệ vào quan hệ phi tuyến) Tuy nhiên, phạm vi thay đổi biến hệ thống không lớn, hệ thống tuyến tính ... cụ để phân tích và mộ tổng hợp hệ đơn biến lý thuyết điều khiển cổ điển Ví dụ: hệ điều khiển đònh vò (vò trí) Hệ đa biến hệ có nhiều ngõ vào nhiều ngõ Công cụ để phân tích tổng hợp hệ đa biến lý ... nghiên cứu trình điều khiển truyền thông máy móc, sinh vật kinh tế Điều khiển học mang đặc trưng tổng quát phân chia thành nhiều lónh vực khác như: toán điều khiển, điều khiễn học kỹ thuật, điều...
Ngày tải lên: 04/08/2012, 14:21

Giới thiệu lý thuyết điều khiển tự động
... nói hầu hết hệ thống vật lý hệ phi tuyến, có nghóa hệ thống có phần tử phần tử phi tuyến (quan hệ vào quan hệ phi tuyến) Tuy nhiên, phạm vi thay đổi biến hệ thống không lớn, hệ thống tuyến tính ... Công cụ để phân tích tổng hợp hệ đơn biến lý thuyết điều khiển cổ điển Ví dụ: hệ điều khiển đònh vò (vò trí) Hệ đa biến hệ có nhiều ngõ vào nhiều ngõ Công cụ để phân tích tổng hợp hệ đa biến lý ... nghiên cứu trình điều khiển truyền thông máy móc, sinh vật kinh tế Điều khiển học mang đặc trưng tổng quát phân chia thành nhiều lónh vực khác như: toán điều khiển, điều khiễn học kỹ thuật, điều...
Ngày tải lên: 10/09/2012, 10:02

Giới thiệu tổng quan về lý thuyết điều khiển tự động
... nói hầu hết hệ thống vật lý hệ phi tuyến, có nghóa hệ thống có phần tử phần tử phi tuyến (quan hệ vào quan hệ phi tuyến) Tuy nhiên, phạm vi thay đổi biến hệ thống không lớn, hệ thống tuyến tính ... cụ để phân tích và mộ tổng hợp hệ đơn biến lý thuyết điều khiển cổ điển Ví dụ: hệ điều khiển đònh vò (vò trí) Hệ đa biến hệ có nhiều ngõ vào nhiều ngõ Công cụ để phân tích tổng hợp hệ đa biến lý ... nghiên cứu trình điều khiển truyền thông máy móc, sinh vật kinh tế Điều khiển học mang đặc trưng tổng quát phân chia thành nhiều lónh vực khác như: toán điều khiển, điều khiễn học kỹ thuật, điều...
Ngày tải lên: 10/09/2012, 10:02


Báo Cáo Lý Thuyết Điều Khiển Tự Động sử dụng MatLab & Simulink
... Báo Cáo Lý Thuyết Điều Khiển Tự Động ========================&&&=========================== Vào Start ... >> bode(wh) >> step(wk) >> impulse(wk) Hàm đặc tính tần Đồ Thị Bode Hàm độ Hàm độ xung III ) TỔNG HỢP MỘT HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG Hệ Thống Điều Khiển Tốc Độ Động Cơ Hàm MatLab cho hệ thống...
Ngày tải lên: 15/10/2012, 09:20

Giáo trình lý thuyết điều khiển logic
... VD100 chiếm 32 bit hiểu DWORD, DINT hay REAL Sau dạng liệu tổng hợp: Việc kiểm tra tính hợp lệ liệu hay không kiểm tra đóng vai trò quan trọng Ví dụ lệnh so sánh số nguyên (>I,
Ngày tải lên: 23/10/2012, 08:12


ứng dụng lý thuyết điều khiển thích nghi bền vững nâng cao chất lượng hệ truyền động quấn băng vật liệu
... tớnh ng hc bin i nhanh D0 = -C2TA22-1B2 m khỏc c gi l ký sinh cú th quan sỏt rừ Cú mt cỏch khỏc kh tỏc ng ca cỏc ký sinh quan sỏt c v iu khin nú bng cỏch thờm vo (1.2-1) mt b lc thụng thp Khi ... dng quan h sau i vi i tng: S húa bi Trung tõm Hc liu i hc Thỏi Nguyờn http://www.lrc-tnu.edu.vn Lun thc s k thut - 30 - * Sai lch cng Gi G(s) v G0(s) l hm truyn ca i tng tht v mụ hỡnh tng ng Quan ... bỡnh phng ti thiu vi phng phỏp chiu Vi mc tiờu t ra, ni dung lun bao gm cỏc chng sau: Chng 1: Tng quan v h iu khin thớch nghi bn vng Ni dung ca chng trung vo nghiờn cu nhng c im chung nht ca KTN...
Ngày tải lên: 06/11/2012, 11:09

Tổng hợp các bài tập môn lý thuyết điều khiển
... truyền khâu phản hồi: Từ sơ đồ khối hình ta có: Bài 1-5: Cho hệ thống trình bày hình Hãy tìm mối quan hệ u y ( ) hàm theo H1, H2, G1, G2 G3 Lời giải: Từ sơ đồ khối ta có phương trình: Từ phương ... laplace x(t) X(s) có phương trình sau : Tìm x(t) Bài làm: Ta phân tích phương trình X(s) thành tổng hàm đơn giản Chúng ta ý : Vậy : Chúng ta tính số cách cân hệ số : Vậy laplace ngược ta x(t) ... Chứng minh rằng hàm trùn của hai hệ thớng sau là Giải: Ở sơ đờ khới thứ nhất ta có quan hệ giữa u và y Từ đó ta rút được hàm trùn Ở sơ đờ khới thứ hai ta có Từ đó...
Ngày tải lên: 05/03/2013, 17:10

ứng dụng lý thuyết Điều khiển số và Công nghệ CNC
... tốt nghiệp Nguyên Văn Thợng Zmin=96,1-96=0,1mm Lợng d tổng cộng: Z0max=2,39+0,3=2,69mm Z0min=0,39+0,1=0,49mm Khoa khí 0,79 2,69 Lợng d tổng cộng 0,1 0,3 96 96,1 96 0,104 100 96,4 300 0,685 - ... Nguyên công I: Phay đáy dới gối đỡ: Tổng lợng d gia công vật đúc:2,5mm Phay chia làm hai bớc: Phay thô : Z1=2mm Phay tinh : Z2=0,5mm Nguyên công II: Phay đáy gối đỡ: Tổng lợng d gia công vật đúc:2,5mm ... khoa Đồ án tốt nghiệp Nguyên Văn Thợng Tổng lợng d:Z0=2,5mm Phay chia làm hai bớc: Phay thô : Z1=2mm Phay tinh : Z2=0,5mm 5.Nguyên côngVI:Phay bậc thân gối đỡ: Tổng lợng d:Z0=8mm Phay chia làm ba...
Ngày tải lên: 07/08/2013, 19:34


Bài giảng môn lý thuyết điều khiển tự động và matlab
... phương pháp biến đối ngược hàm hữu tỷ : • Phân tích hàm thành tổng phân thức tối giản • Tra bảng ảnh dịch thành tổng hàm gốc • Tính tổng hàm gốc tìm 14 1 1 = − + s (1 + s ) + s s s Tra bảng ảnh ... thuyết : Là phương pháp thiết lập mô hình dựa định luật có sẵn quan hệ vật lý bên quan hệ giao tiếp với môi trường bên hệ thống Các quan hệ mô tả theo theo quy luật lý hoá, quy luật cân … dạng ... trình cân mô men B.phương pháp thực nghiệm (nhận dạng) : Trong trường hợp hiểu biết về quan hệ lý hoá bên quan hệ giao tiếp với môi trường bên hệ thống không đầy đủ để xây dựng hoàn chỉnh mô...
Ngày tải lên: 12/08/2013, 22:21
Giáo trình lý thuyết điều khiển tự động 1
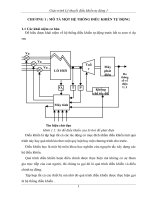
... biến trạng thái chọn biến vật lý biến vật lý Theo quan điểm phân tích tổng hợp hệ thống thường, người ta chia biến đặc trưng hệ thống hay có quan hệ định với nhóm sau: Các biến vào hay tác động ... truyền mạch khuếch đại đảo sau Hình 2.17 Sơ đồ hệ thống khuếch đại đảo Tổng trở Z1(s) Z1 ( s) = C1 s + R1 = 5.6 x10 −6 s + Tổng trở Z2(s) 32 360 x10 = 360 x10 2.016 s + (2.53) Giáo trình Lý thuyết ... khiển (Controller ), Thiết bị đo lường (Measuring device) - Sơ đồ tổng quát u(t) e(t) x(t) y(t) C - O z(t) M Hình 1.2: Sơ đồ tổng quát hệ thống điều khiển tự động Mọi hệ thống điều khiển tự động...
Ngày tải lên: 13/08/2013, 09:21

Giáo trình lý thuyết điều khiển tự động
... biến trạng thái chọn biến vật lý biến vật lý Theo quan điểm phân tích tổng hợp hệ thống thường, người ta chia biến đặc trưng hệ thống hay có quan hệ định với nhóm sau: Các biến vào hay tác động ... truyền mạch khuếch đại đảo sau Hình 2.17 Sơ đồ hệ thống khuếch đại đảo Tổng trở Z1(s) Z1 ( s) = C1 s + R1 = 5.6 x10 −6 s + Tổng trở Z2(s) 32 360 x10 = 360 x10 2.016 s + (2.53) Giáo trình Lý thuyết ... khiển (Controller ), Thiết bị đo lường (Measuring device) - Sơ đồ tổng quát u(t) e(t) x(t) y(t) C - O z(t) M Hình 1.2: Sơ đồ tổng quát hệ thống điều khiển tự động Mọi hệ thống điều khiển tự động...
Ngày tải lên: 13/08/2013, 09:22

Lý thuyết điều khiển tự động
... 5.2 Tính quan sát t nh sau : 6c #c 5.2.1 nh ngh a M t h th ng c g i quan sát c bi n tr ng thái X c a h th ng 5.2.2 c n u t$ vect U Y ã có, ta có th xác nh i u ki n Xây d ng ma tr-n quan sát L ... lo i nh h vòng kín, h nhi u vòng kín,… Ph n m 3.3 u Phân lo i theo kh n ng quan sát tín hi u 3.3.1 H th ng liên t c Quan sát 6c t5t c tr ng thái c a h th ng theo th;i gian Mô t toán h c : ph ... th quan sát tr ng thái c a h th ng theo chu k? (T) V b n ch5t, h th ng m t d ng c a h th ng liên t'c b) H th ng v i s ki n gián o n (S événement discret) - c tr ng b i s ki n không chu k? - Quan...
Ngày tải lên: 13/08/2013, 10:51

Bài giảng môn học lý thuyết điều khiển tự động
... 5.2 Tính quan sát t nh sau : 6c #c 5.2.1 nh ngh a M t h th ng c g i quan sát c bi n tr ng thái X c a h th ng 5.2.2 c n u t$ vect U Y ã có, ta có th xác nh i u ki n Xây d ng ma tr-n quan sát L ... lo i nh h vòng kín, h nhi u vòng kín,… Ph n m 3.3 u Phân lo i theo kh n ng quan sát tín hi u 3.3.1 H th ng liên t c Quan sát 6c t5t c tr ng thái c a h th ng theo th;i gian Mô t toán h c : ph ... th quan sát tr ng thái c a h th ng theo chu k? (T) V b n ch5t, h th ng m t d ng c a h th ng liên t'c b) H th ng v i s ki n gián o n (S événement discret) - c tr ng b i s ki n không chu k? - Quan...
Ngày tải lên: 14/08/2013, 08:53

Bài giảng môn lý thuyết điều khiển tự động
... 5.2 Tính quan sát t nh sau : 6c #c 5.2.1 nh ngh a M t h th ng c g i quan sát c bi n tr ng thái X c a h th ng 5.2.2 c n u t$ vect U Y ã có, ta có th xác nh i u ki n Xây d ng ma tr-n quan sát L ... lo i nh h vòng kín, h nhi u vòng kín,… Ph n m 3.3 u Phân lo i theo kh n ng quan sát tín hi u 3.3.1 H th ng liên t c Quan sát 6c t5t c tr ng thái c a h th ng theo th;i gian Mô t toán h c : ph ... th quan sát tr ng thái c a h th ng theo chu k? (T) V b n ch5t, h th ng m t d ng c a h th ng liên t'c b) H th ng v i s ki n gián o n (S événement discret) - c tr ng b i s ki n không chu k? - Quan...
Ngày tải lên: 14/08/2013, 08:53

Bài tập lý thuyết điều khiển hiện đại
... ŵŷ%%ź ŶŻŴ ŶŶ ŷ%˲ŵŴ ˳{ˮ{ {ŵ Ŵ Ŵ{˲{ˮ{ -2- Huỳnh Chí Công-07703151 ðHðT3A 2) Ki m tra s ñi u n ñư c s quan sát ñư c c a h : Ŵ ŵ Ŵ Ŵ E; C = {ŵ Ŵ Ŵ{ Ta có :A = AŴ B=A Ŵ ŵE; Ŵ Ŵ ŵŷ%%ź ŶŻŴ ŶŶ ŷ%˲ŵŴ CA ... ź ŴŸŷ˲ŵŴ E ŵ ŷŶ˲ŵŴ#$ VW` ŵ Ŵ Do ñó h hoàn toàn có VW` / ŵ ŵŶŴ%˲ŵŴ$$ Ŵ th ñi u n ñư c(VW` / Ŵ) quan sát ñư c(VW` Ŵ) Và ta suy ñư c: 3) Phân tích ñ i tư ng ñi u n: tính ñi m c c, v ñư ng ñ c n,...
Ngày tải lên: 14/08/2013, 09:24


Giới thiệu lý thuyết điều khiển tự động (1)
... nói hầu hết hệ thống vật lý hệ phi tuyến, có nghóa hệ thống có phần tử phần tử phi tuyến (quan hệ vào quan hệ phi tuyến) Tuy nhiên, phạm vi thay đổi biến hệ thống không lớn, hệ thống tuyến tính ... Công cụ để phân tích tổng hợp hệ đơn biến lý thuyết điều khiển cổ điển Ví dụ: hệ điều khiển đònh vò (vò trí) Hệ đa biến hệ có nhiều ngõ vào nhiều ngõ Công cụ để phân tích tổng hợp hệ đa biến lý ... thực tế Thực hiện: PHẠM QUỐC TR ƯỜNG -4- GVHD: PHẠMQUANG HUY Khảo sát ứng dụng MATLAB điều khiển tự động Thực hiện: PHẠM QUỐC TR ƯỜNG -5- GVHD: PHẠMQUANG HUY ...
Ngày tải lên: 02/10/2013, 05:20