lý thuyết điều khiển

Lý thuyết điều khiển tự động.doc
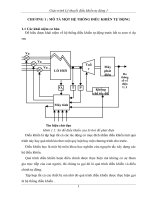
... học kỹ thuật, điều khiển học sinh vật (phỏng sinh vật: bionics), điều khiển học kinh tế. 2. Lý thuyết điều khiển tự động: Là cơ sở lý thuyết của điều khiển học kỹ thuật. Điều khiển tự động là ... là hệ thống điều khiển hở. Hình 1.2: Hệ thống điều khiển hở Cơ sở lý thuyết để nghiên cứu hệ thống hở là lý thuyết về relay và lý thuyết ôtômát hữu hạn. II. PHÂN LOẠI HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG Hệ ... (repeatable). Nếu không thỏa mãn 2 điều kiện trên, hệ thống điều khiển là ngẫu nhiên. III. NHIỆM VỤ CỦA LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG Để khảo sát và thiết kế một hệ thống điều khiển tự động người ta thực...
Ngày tải lên: 04/08/2012, 14:21

Giới thiệu lý thuyết điều khiển tự động
... như: toán điều khiển, điều khiễn học kỹ thuật, điều khiển học sinh vật (phỏng sinh vật: bionics), điều khiển học kinh tế. 2. Lý thuyết điều khiển tự động: Là cơ sở lý thuyết của điều khiển học ... phản hồi về thiết bò điều khiển. Sơ đồ hình 1.2 là hệ thống điều khiển hở. Hình 1.2: Hệ thống điều khiển hở Cơ sở lý thuyết để nghiên cứu hệ thống hở là lý thuyết về relay và lý thuyết ôtômát hữu ... để tạo ra tín hiệu điều khiển. Hình 1.1 chính là sơ đồ của hệ thống kín. Cơ sở lý thuyết để nghiên cứu hệ thống kín chính là lý thuyết điều khiển tự động. 5. Hệ thống điều khiển hở: Đối với...
Ngày tải lên: 10/09/2012, 10:02

Giới thiệu tổng quan về lý thuyết điều khiển tự động
... như: toán điều khiển, điều khiễn học kỹ thuật, điều khiển học sinh vật (phỏng sinh vật: bionics), điều khiển học kinh tế. 2. Lý thuyết điều khiển tự động: Là cơ sở lý thuyết của điều khiển học ... hồi về thiết bò điều khiển. Sơ đồ hình 1.2 là hệ thống điều khiển hở. Hình 1.2: Hệ thống điều khiển hở Cơ sở lý thuyết để nghiên cứu hệ thống hở là lý thuyết về relay và lý thuyết ôtômát hữu ... (repeatable). Nếu không thỏa mãn 2 điều kiện trên, hệ thống điều khiển là ngẫu nhiên. III. NHIỆM VỤ CỦA LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG Để khảo sát và thiết kế một hệ thống điều khiển tự động người ta thực...
Ngày tải lên: 10/09/2012, 10:02


Báo Cáo Lý Thuyết Điều Khiển Tự Động sử dụng MatLab & Simulink
... Đặc tính tần -Đặc tính tần số_Logarit -Hàm quá độ III ) TỔNG HỢP MỘT HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG 1. Hệ Thống Điều Khiển Tốc Độ Động Cơ Hàm MatLab cho hệ thống >> w1=tf(1,1); >> w2=tf(20,[2 ... quá điều chỉnh là = (1.0295-1)/1*100%=2.9% Nh ận x ét : Khi chưa có bù đầu vào (K=0) thời gian quá độ lớn và độ quá điều chỉnh cũng lớn Khi có bù đầu vào (K=1) thời gian quá độ~0 và độ quá điều ... 1])*tf(1,[5 1]); rlocus(w) rlocfind(w) [k,p]=rlocfind(w) -Hệ thống ổn định K=2 IV ) KHẢO SÁT HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG DÙNG SIMULINK Sơ đồ khối mô phỏng trên Simulink Thư viện các link kiện cần dùng...
Ngày tải lên: 15/10/2012, 09:20

Giáo trình lý thuyết điều khiển logic
... (b6) 34 6.5. Thông báo và xử lý lỗi (Troubleshooting) (b6) 35 Chương 7 I/O 36 7.1. Vào ra số (b3) 36 7.1.1 Nối dây và chương trình điều khiển 36 7.1.2 Ví dụ điều khiển motor 36 7.1.3 Mở rộng ... Các ngõ vào ra chính là các điểm điều khiển của một hệ thống: các ngõ vào phản ảnh trạng thái các thiết bị như các đầu dò, các công tắc, và các đầu ra điều khiển những bộ phận chấp hành như ... chấp hành như mô tơ, bơm, van, 7.1. Vào ra số (b3) 7.1.1 Nối dây và chương trình điều khiển 7.1.2 Ví dụ điều khiển motor Chương trình: nguyen ba hoi Trang 20 Chương 4 Ngôn ngữ...
Ngày tải lên: 23/10/2012, 08:12

Lý thuyết điều khiển tự động hóa quá trình nhiệt
... vòng điều khiển riêng biệt : - Vòng điều khiển mức nước: đối tượng điều chỉnh là kênh thẳng 0 11 . - Vòng điều khiển nhiệt độ : đối tượng điều chỉnh là kênh thẳng 0 22 . Hai vòng điều khiển ... Bài tập lớn : Lý Thuyết điều khiển tự động hóa quá trình Nhiệt Trang 1 Sinh viên : Đặng Hồng Chuyên. Lớp : Máy & Thiết bị Nhiệt Lạnh 02 - K50 Bài tập lớn lý thuyết điều khiển tự động ... 2 2 0 J (t).dt 9,44. Độ quá điều chỉnh (độ vượt trên giá trị điều khiển cần thiết) : 0,34. Hệ số tắt dần : = 0,9. Bài tập lớn : Lý Thuyết điều khiển tự động hóa quá trình Nhiệt Trang...
Ngày tải lên: 29/10/2012, 14:50

ứng dụng lý thuyết điều khiển thích nghi bền vững nâng cao chất lượng hệ truyền động quấn băng vật liệu
... Các bộ điều khiển cần thoả mãn các yêu cầu đặt trước thường được thiết kế theo các hướng sau: + Điều khiển bền vững. + Điều khiển thích nghi. + Điều khiển thích nghi bền vững. * Điều khiển ... luận văn ĐKTN Điều khiển thích nghi ĐKTNBV Điều khiển thích nghi bền vững MRAC Hệ điều khiển thích nghi theo mô hình mẫu STR Hệ điều khiển thích nghi tự chỉnh DSTR Hệ điều khiển thích nghi ... http://www.lrc-tnu.edu.vn Hệ điều khiển thích nghi có 3 sơ đồ chính sau đây: - Hệ điều khiển thích nghi điều chỉnh hệ số khuếch đại; - Hệ điều khiển thích nghi theo mô hình mẫu; - Hệ điều khiển thích nghi...
Ngày tải lên: 06/11/2012, 11:09

Tổng hợp các bài tập môn lý thuyết điều khiển
... số T: Mômen xoắn θ : Góc của trục động cơ Ec: Điện áp điều khiển J: Mômen quán tính Gộp hai công thức lại ta có: Chuyển đổi sang laplace với điều khiện ban đầu là 0 Hàm truyền là: Với Có cơ năng ... sau : và các định lý vi phân. Hãy tìm chuyển đổi Laplace của hàm sau: Lời giải: Định lý về phép lấy vi phân: Nếu f(t) trong miền thời gian thì: Theo đó Ta sử dụng định lý trên và phương trình: ... vừa có, ta có được hàm truyền được đơn giản hóa như sau: Bài 1-7: Thu gọn sơ đồ của hệ thống điều khiển vòng kín nhiều vòng hình dưới thành sơ đồ đơn giản: Giải: Để có thể thu gọn sơ đồ trên...
Ngày tải lên: 05/03/2013, 17:10



Bạn có muốn tìm thêm với từ khóa: