lý thuyết điều khiển vị trí

nghiên cứu lý thuyết điều khiển vị trí
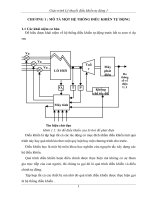
... nghiệp Lý thuyết điều khiển vị trí Hình 1.5. Cấu trúc điều khiển biến trạng thái. 1.2 Hệ điều chỉnh vị trí tuyến tính. Hệ điều chỉnh vị trí tuyến tính mà ta nghiên cứu ở đây có bộ điều chỉnh vị trí ... Cấu trúc hệ điều khiển bù theo lợng điều khiển. 16 Đồ án tốt nghiệp Lý thuyết điều khiển vị trí 1.1 Nguyên tắc xây dựng hệ điều chỉnh vị trí Hệ thống truyền động điện điều khiển vị trí thuộc loại ... Đồ án tốt nghiệp Lý thuyết điều khiển vị trí Ngời ta gọi (1-23) là điều kiện bất biến của hệ đối với lợng điều khiển. Thí dụ trong hệ truyền động điều khiển vị trí tiristo động cơ một...
Ngày tải lên: 21/04/2014, 20:46

Giáo trình lý thuyết điều khiển logic
... (b6) 34 6.5. Thông báo và xử lý lỗi (Troubleshooting) (b6) 35 Chương 7 I/O 36 7.1. Vào ra số (b3) 36 7.1.1 Nối dây và chương trình điều khiển 36 7.1.2 Ví dụ điều khiển motor 36 7.1.3 Mở rộng ... Các ngõ vào ra chính là các điểm điều khiển của một hệ thống: các ngõ vào phản ảnh trạng thái các thiết bị như các đầu dò, các công tắc, và các đầu ra điều khiển những bộ phận chấp hành như ... chấp hành như mô tơ, bơm, van, 7.1. Vào ra số (b3) 7.1.1 Nối dây và chương trình điều khiển 7.1.2 Ví dụ điều khiển motor Chương trình: nguyen ba hoi Trang 20 Chương 4 Ngôn ngữ...
Ngày tải lên: 23/10/2012, 08:12

Lý thuyết điều khiển tự động hóa quá trình nhiệt
... vòng điều khiển riêng biệt : - Vòng điều khiển mức nước: đối tượng điều chỉnh là kênh thẳng 0 11 . - Vòng điều khiển nhiệt độ : đối tượng điều chỉnh là kênh thẳng 0 22 . Hai vòng điều khiển ... Bài tập lớn : Lý Thuyết điều khiển tự động hóa quá trình Nhiệt Trang 1 Sinh viên : Đặng Hồng Chuyên. Lớp : Máy & Thiết bị Nhiệt Lạnh 02 - K50 Bài tập lớn lý thuyết điều khiển tự động ... tập lớn : Lý Thuyết điều khiển tự động hóa quá trình Nhiệt Trang 5 Sinh viên : Đặng Hồng Chuyên. Lớp : Máy & Thiết bị Nhiệt Lạnh 02 - K50 1. Xác định mô hình đối tượng điều chỉnh...
Ngày tải lên: 29/10/2012, 14:50


GIÁO TRÌNH LÝ THUYẾT ĐIỀU KHIỂN LOGIC . phần 1
... TRÌNH LÝ THUYẾT ĐIỀU KHIỂN LOGIC ThS. Nguyễn Bá Hội Đại học Đà Nẵng - Trường Đại học Bách khoa hoinb@ud.edu.vn Giáo trình đầy đủ bao gồm 3 phần: 1. Giáo trình lý thuyết ... trình con (subroutines); các chương trình con xử lý ngắt (interrupt routines) có thể có hoặc không. · Chương trình chính bao gồm các lệnh điều khiển ứng dụng. Các lệnh này được thực hiện tuần ... đầu vào được cập nhật từ các đầu vào vật lý một lần trong một vòng quét, ngay ở đầu vòng quét. Vùng ảnh các đầu ra cũng cập nhật ra các đầu ra vật lý cuối mỗi vòng quét. Nguyên tắc này đảm...
Ngày tải lên: 28/10/2013, 09:15

Lý thuyết điều khiển và hướng dẫn chi tiết lập trình trên s7 200
... hệ thống điều khiển khác 35 2.3. Cấu trúc phần cứng của PLC 36 2.3.1. Đơn vị xử lý trung tâm (CPU Central Procesing Unit) 36 a) Đơn vị xử lý "một -bit" 36 b) Đơn vị xử lý "từ ... các hệ thống điều khiển cổ điển như rơle, mạch tổ hợp điện tử, IC số. • Thiết bị cho phép thực hiện linh hoạt các thuật toán điều khiển số thông qua ngôn ngữ lập trình. • Bộ điều khiển số nhỏ ... trình Tếp xúc vật lý Với chức năng được lưu trữ bằng : Điều khiển Hình 2.2: Những đặc trưng lập trình của các loại điều khiển PLC có ưu...
Ngày tải lên: 02/03/2014, 23:08

Lý thuyết điều khiển tự động.doc
... học kỹ thuật, điều khiển học sinh vật (phỏng sinh vật: bionics), điều khiển học kinh tế. 2. Lý thuyết điều khiển tự động: Là cơ sở lý thuyết của điều khiển học kỹ thuật. Điều khiển tự động là ... là lý thuyết điều khiển cổ điển. Ví dụ: hệ điều khiển định vị (vị trí) . Hệ đa biến là hệ có nhiều ngõ vào và nhiều ngõ ra. Công cụ để phân tích và tổng hợp hệ đa biến là lý thuyềt điều khiển ... là hệ thống điều khiển hở. Hình 1.2: Hệ thống điều khiển hở Cơ sở lý thuyết để nghiên cứu hệ thống hở là lý thuyết về relay và lý thuyết ôtômát hữu hạn. II. PHÂN LOẠI HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG Hệ...
Ngày tải lên: 04/08/2012, 14:21

Giới thiệu lý thuyết điều khiển tự động
... như: toán điều khiển, điều khiễn học kỹ thuật, điều khiển học sinh vật (phỏng sinh vật: bionics), điều khiển học kinh tế. 2. Lý thuyết điều khiển tự động: Là cơ sở lý thuyết của điều khiển học ... phản hồi về thiết bị điều khiển. Sơ đồ hình 1.2 là hệ thống điều khiển hở. Hình 1.2: Hệ thống điều khiển hở Cơ sở lý thuyết để nghiên cứu hệ thống hở là lý thuyết về relay và lý thuyết ôtômát hữu ... biến là lý thuyết điều khiển cổ điển. Ví dụ: hệ điều khiển định vị (vị trí) . Hệ đa biến là hệ có nhiều ngõ vào và nhiều ngõ ra. Công cụ để phân tích và tổng hợp hệ đa biến là lý thuyềt điều khiển...
Ngày tải lên: 10/09/2012, 10:02

Giới thiệu tổng quan về lý thuyết điều khiển tự động
... như: toán điều khiển, điều khiễn học kỹ thuật, điều khiển học sinh vật (phỏng sinh vật: bionics), điều khiển học kinh tế. 2. Lý thuyết điều khiển tự động: Là cơ sở lý thuyết của điều khiển học ... là lý thuyết điều khiển cổ điển. Ví dụ: hệ điều khiển định vị (vị trí) . Hệ đa biến là hệ có nhiều ngõ vào và nhiều ngõ ra. Công cụ để phân tích và tổng hợp hệ đa biến là lý thuyềt điều khiển ... hồi về thiết bị điều khiển. Sơ đồ hình 1.2 là hệ thống điều khiển hở. Hình 1.2: Hệ thống điều khiển hở Cơ sở lý thuyết để nghiên cứu hệ thống hở là lý thuyết về relay và lý thuyết ôtômát hữu...
Ngày tải lên: 10/09/2012, 10:02


Báo Cáo Lý Thuyết Điều Khiển Tự Động sử dụng MatLab & Simulink
... Đặc tính tần -Đặc tính tần số_Logarit -Hàm quá độ III ) TỔNG HỢP MỘT HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG 1. Hệ Thống Điều Khiển Tốc Độ Động Cơ Hàm MatLab cho hệ thống >> w1=tf(1,1); >> w2=tf(20,[2 ... quá điều chỉnh là = (1.0295-1)/1*100%=2.9% Nh ận x ét : Khi chưa có bù đầu vào (K=0) thời gian quá độ lớn và độ quá điều chỉnh cũng lớn Khi có bù đầu vào (K=1) thời gian quá độ~0 và độ quá điều ... 1])*tf(1,[5 1]); rlocus(w) rlocfind(w) [k,p]=rlocfind(w) -Hệ thống ổn định K=2 IV ) KHẢO SÁT HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG DÙNG SIMULINK Sơ đồ khối mô phỏng trên Simulink Thư viện các link kiện cần dùng...
Ngày tải lên: 15/10/2012, 09:20

ứng dụng lý thuyết điều khiển thích nghi bền vững nâng cao chất lượng hệ truyền động quấn băng vật liệu
... Các bộ điều khiển cần thoả mãn các yêu cầu đặt trước thường được thiết kế theo các hướng sau: + Điều khiển bền vững. + Điều khiển thích nghi. + Điều khiển thích nghi bền vững. * Điều khiển ... luận văn ĐKTN Điều khiển thích nghi ĐKTNBV Điều khiển thích nghi bền vững MRAC Hệ điều khiển thích nghi theo mô hình mẫu STR Hệ điều khiển thích nghi tự chỉnh DSTR Hệ điều khiển thích nghi ... http://www.lrc-tnu.edu.vn Hệ điều khiển thích nghi có 3 sơ đồ chính sau đây: - Hệ điều khiển thích nghi điều chỉnh hệ số khuếch đại; - Hệ điều khiển thích nghi theo mô hình mẫu; - Hệ điều khiển thích nghi...
Ngày tải lên: 06/11/2012, 11:09
Bạn có muốn tìm thêm với từ khóa: