bai giang dien tu quan he tu lop 5

Bài giảng lý thuyết điều khiển tự động - Phần tử và hệ thống tự động part 1 pps
... khóa: control, control theory, control system, feedback control TD: Automatic Control Systems, B. C. Kuo. Modern Control Engineering, K. Otaga. Modern Control System Theory and Design, S.M. Shinners Feedback ... Chương 3: Đánh giá tính ổn định của hệ thống Chương 4: Chất lượng của hệ thống điều khiển Chương 5: Thiết kế hệ thống điều khiển liên tục Chương 6: Mô tả toán học hệ thống điều khiển rời rạc ... Chương 7: Phân tích và thiết kế hệ thống điều khiển rời rạc Chương 8: Hệ thống điều khiển phi tuyến Nội dung môn học Nội dung moân hoïc ...
Ngày tải lên: 07/08/2014, 23:23

Bài giảng lý thuyết điều khiển tự động - Phần tử và hệ thống tự động part 2 pptx
... â H. T. Hong - éHBK TPHCM 7 Thí dụ 1: Lái xe, mục tiêu giữ tốc độ xe ổn định v=40km/h 1. Mắt quan sát đồng hồ đo tốc độ ⇒ thu thập thông tin. 2. Bộ não điều khiển tăng tốc nếu v<40km/h,...
Ngày tải lên: 07/08/2014, 23:23

Bài giảng lý thuyết điều khiển tự động - Phần tử và hệ thống tự động part 3 ppt
... thông tin phản hồi (tt) Sơ đồ điều khiển kết hợp 26 September 2006 â H. T. Hong - éHBK TPHCM 15 Nguyên tắc 1 Nguyên tắc 1 : : Nguyên tắc thông tin phản hồi (tt) Nguyên tắc thông tin phản hồi...
Ngày tải lên: 07/08/2014, 23:23

Bài giảng lý thuyết điều khiển tự động - Phần tử và hệ thống tự động part 4 potx
... lỏng cần giữ không đổi). … 26 September 2006 â H. T. Hong - éHBK TPHCM 20 Nguyên tắc 5 Nguyên tắc 5 : : Nguyên tắc phân cấp Nguyên tắc phân cấp Một hệ thống điều khiển phức tạp cần xây...
Ngày tải lên: 07/08/2014, 23:23

Bài giảng lý thuyết điều khiển tự động - Phần tử và hệ thống tự động part 5 pdf
... hóa. Điều khiển theo chương trình: Tín hiệu vào r(t) là hàm thay đổi theo thời gian nhưng đã biết trước. Điều khiển theo dõi: Tín hiệu vào r(t) là hàm không biết trước theo thời gian. 26 ... 26 Phân loại theo chiến lược điều khiển Phân loại theo chiến lược điều khiển Mục tiêu điều khiển thường gặp nhất là sai số giữa tín hiệu ra và tín hiệu vào chuẩn càng nhỏ càng tốt. Tùy theo dạng ... hệ thống trong thực tế đều là hệ phi tuyến biến đổi theo thời gian, nhiều ngõ vào, nhiều ngõ ra. Môn học LTĐKTĐ chủ yếu đề cập đến lý thuyết điều khiển hệ tuyến tính bất biến, một ngõ vào, một...
Ngày tải lên: 07/08/2014, 23:23

Bài giảng lý thuyết điều khiển tự động - Phần tử và hệ thống tự động part 6 potx
... kế hệ thống là phương trình trạng thái. Đặc điểm: Có thể áp dụng cho hệ thống phi tuyến, biến đổi theo thời gian, nhiều ngõ vào, nhiều ngõ ra. Kỹ thuật thiết kế trong miền thời gian ... tích và thiết kế hệ thống là hàm truyền. Đặc điểm: Đơn giản Áp dụng thuận lợi cho hệ thống tuyến tính bất biến một ngõ vào, một ngõ ra. Kỹ thuật thiết kế trong miền tần số. Các phương ... của môn học LT ĐKTĐ chủ yếu đề cấp đến các phương pháp kinh điển phân tích, thiết kế hệ thống tuyến tính, bất biến, một ngõ vào, một ngõ ra. Do vậy kiến thức có được từ môn học giúp kỹ sư...
Ngày tải lên: 07/08/2014, 23:23

Bài giảng lý thuyết điều khiển tự động - Phần tử và hệ thống tự động part 7 docx
... teá 26 September 2006 â H. T. Hong - éHBK TPHCM 33 Các môn học tiếp theo Lý thuyết điều khiển tự động Các môn học tiếp theo Lý thuyết điều khiển tự động Các PP điều khiển hiện đại sẽ được ... Điều khiển hệ đa biến (bậc Cao học). Điều khiển hệ phi tuyến (bậc Cao học). Các PP ĐK thông minh sẽ được đề cập đến trong môn học: Trí tu nhân tạo và hệ chuyên gia (bậc Đại học) Hệ thống ... phỏng (bậc Cao học) 26 September 2006 â H. T. Hong - éHBK TPHCM 32 Các môn học liên quan Các môn học liên quan Để có thể thiết kế được các hệ thống điều khiển ở cấp thực thi thực tế, ngoài...
Ngày tải lên: 07/08/2014, 23:23

Bài giảng lý thuyết điều khiển tự động - Phần tử và hệ thống tự động part 8 pot
... September 2006 â H. T. Hong - éHBK TPHCM 38 Hệ thống điều khiển nhiệt độ theo chương trình Hệ thống điều khiển nhiệt độ theo chương trình ...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Phần tử và hệ thống tự động part 9 pot
Ngày tải lên: 07/08/2014, 23:24

BÀI GIẢNG MINH HỌA CHUYÊN ĐỀ ĐỔI MỚI PHƯƠNG PHÁP DẠY HỌC MỘT SỐ BIỆN PHÁP HƯỚNG DẪN HỌC SINH HỌC TỐT MÔN LUYỆN TỪ VÀ CÂU LỚP 5 Bài: LUYỆN TẬP VỀ QUAN HỆ TỪ
Ngày tải lên: 18/05/2015, 23:03

Soạn bài Chữa lỗi về quan hệ từ
... đối xử của họ. Gợi ý: Các quan hệ từ với, tuy, bằng trong các câu này có thích hợp không? Đây là trường hợp dùng sai nghĩa của quan hệ từ, có thể thay với bằng như, thay tuy bằng dù, thay bằng ... - Ngày nay, chúng ta cũng có quan niệm với cha ông ta ngày xưa, lấy đạo đức, tài năng làm trọng. - Tuy nước sơn có đẹp đến mấy mà chất gỗ không tốt thì đồ vật cũng ... thiếu chủ ngữ là việc dùng các quan hệ từ không đúng đã biến thành phần chủ ngữ của câu thành thành phần phụ trạng ngữ. Cách chữa chung cho loại lỗi này là bỏ các quan hệ từ để khôi phục chủ ngữ...
Ngày tải lên: 13/03/2014, 22:28

Bài giảng điện học : chương v từ trường không đổi
... bànluônchỉ theo hướng bắc-nam đượcphát hiệnvàokhoảng năm 1000. 1600: William Gilbert làm thí nghiệmvàchỉ ra rằng hiệntượng trên có thể giảithíchnếugiả thiếtcả trái đấtlàmột nam châm cựclớn. “The Earth ... lnbng: 3 0 4 r rsId Bd r r r ì à à = 15 Định luật Ampere (cont. 2) Biểuthứccường độ từ lực: Biểuthứctổng quỏt dng vector: 2 222111 0 sin.sin 4 r dsIdsI dF à à = 3 1122 0 )( 4 r rsdIsdI Fd r r r r ì ì à à = 8 3. Quan ... lựctương tác giữa chúng được truyềnnhư thế nào ? -Vớimộtdòngđiện, tính chấtcủa không gian xung quanh dòng điệncóbị thay đổi không ? Chương trình VậtlýPT: thôngthường khi xảyratương tác giữahaivậtthì: -cácvậtphảitiếp...
Ngày tải lên: 04/06/2014, 10:13

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 1 docx
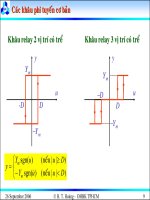
... niệm Định nghóa Đặc điểm của hệ phi tuyến Các khâu phi tuyến đơn giản Mô tả toán học hệ phi tuyến Các phương pháp khảo sát hệ phi tuyến Phương pháp tuyến tính hóa Phương pháp hàm mô ... KHIỂN PHI TUYẾN HỆ THỐNG ĐIỀU KHIỂN PHI TUYẾN Chương 8 Chương 8 26 September 2006 â H. T. Hong - éHBK TPHCM 4 Khái niệm Khái niệm 26 September 2006 â H. T. Hong - éHBK TPHCM 7 Các khâu phi tuyến ... trí Khaâu relay 2 vò trí 26 September 2006 â H. T. Hong - éHBK TPHCM 8 Các khâu phi tuyến cơ bản Các khâu phi tuyến cơ bản < ≥− = ) nếu0 )nếu Du DuuDuK y ||( ||())sgn(( Khâu khuếch đại...
Ngày tải lên: 08/08/2014, 00:20
Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 2 ppt
... các hàm phi tuyến = = ))(),(()( ))(),(()( tuthty tutt x xfx & 26 September 2006 â H. T. Hong - éHBK TPHCM 14 Mô tả hệ phi tuyến dùng phương trình vi phân Mô tả hệ phi tuyến dùng phương ... phi tuyến dùng phương trình vi phân Mô tả toán học hệ phi tuyến dùng phương trình vi phân Quan hệ vào – ra của hệ phi tuyến liên tục có thể biểu diễn dưới dạng phương trình vi phân phi tuyến ... 2006 â H. T. Hong - éHBK TPHCM 15 Mô tả toán học hệ phi tuyến dùng phương trình trạng thá Mô tả toán học hệ phi tuyến dùng phương trình trạng thá i i Hệ phi tuyến liên tục có thể mô tả bằng...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 3 pdf
... dừng của hệ phi tuyến Điểm dừng của hệ phi tuyến = = ))(),(()( ))(),(()( tuthty tutt x xfx & Xét hệ phi tuyến mô tả bởi PTTT phi tuyến: Nếu là điểm dừng của hệ phi tuyến thì: ),( ... hệ phi tuyến 26 September 2006 â H. T. Hong - éHBK TPHCM 24 Tuyến tính hóa hệ phi tuyến Tuyến tính hóa hệ phi tuyến – – Thí dụ 1 Thí dụ 1 PTTT: = = ))(),(()( ))(),(()( tuthty tutt x xfx & )(94 65. 0)( 354 4.0)( )(2 ),( 1 1 tutxtu A k A tgxaC u D +−=+−=xf )())(),(( 1 txtuth ... PTTT: = = ))(),(()( ))(),(()( tuthty tutt x xfx & )(94 65. 0)( 354 4.0)( )(2 ),( 1 1 tutxtu A k A tgxaC u D +−=+−=xf )())(),(( 1 txtuth =x trong đó: y(t) u(t) q in q out Thông số hệ bồn chứa : 2 3 22 sec/981 8.0 ,.sec/ 150 100 ,1 cmg CVcmk cmAcma D = == == ...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 5 doc
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 6 docx
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 7 potx
Ngày tải lên: 08/08/2014, 00:20