bài tập dài điều khiển robot

Bài tập dài điều khiển robot công nghiệp part 2 potx
... khối robot (Create Subsystem) Thiết kế điều khiển PD bù trọng trường - Mô hình toán học robot: M = H (q ) q + V ( q, q ) + G ( q ) Trong ma trận H, V, G xác định theo - Thuật toán điều khiển: ... q + G ( q ) Trong đó: sai lệch góc qay: Tham số điều khiển K KP = K1 e = qd − q Tao khối: K KD = 0 K Tạo khối: Mô hình điều khiển matlab: π / qd = π / 0 q0 = ... 2cosθ (θ + θ θ )] + J (θ + θ ) 2 Thế nối 2: P2 = m2 g [l1 sin θ1 + l g sin(θ1 + θ )] Hàm lagrange robot: L = ( K1 + K ) − ( L1 + L2 ) 1 = m1l g θ + J1 θ + 2 2 + m2 [l1 θ + l g (θ + θ ) +...
Ngày tải lên: 01/04/2014, 01:20

Bài tập dài điều khiển robot công nghiệp doc
... Mô hình điều khiển: Thuật toán điều khiển: t U dk K p e K I e( )d Trong đó: e qd q : sai số vị trí hệ thống Mô hình simulink điều khiển: Creat subsystem Tổng hợp điều khiển: Xác ... tham số điều khiển cho điều chỉnh: Ta chọn: K P1 10 K I K P 10 K I K 15 K I3 P1 Kết mô phỏng: - Qũy đạo khớp 1: - Qũy đạo khớp 2: - Qũy đạo khớp 3: - Quỹ đạo tay robot khong ... plot3(theta1,theta2,d3); hold on; end grid on; Kết : III Thiết kế điều khiển vị trí dạng PI cho khớp Cho mô hình động học khớp robot: (s) u(s) Ki Ti s → Mô hình đối tượng: U : 10 10V...
Ngày tải lên: 01/04/2014, 01:20


BÀI tập dài điều KHIỂN số CHƯƠNG 1 xây DỰNG mô HÌNH ĐỘNG cơ điện một CHIỀU KÍCH từ độc lập
... nh- sau: Bài Tập Dài Điều Khiển Số Phạm Minh Tân Lớp ĐKTĐ_K46 Ch-ơng II : Thiết kế điều khiển để điều khiển động chiều Để điều khiển động chiều thông th-ờng ta dùng hệ thống hai vòng điều khiển: ... điều khiển dòng phần ứng *)Xây dựng mô hình toán học đối t-ợng vòng điều khiển dòng Coi gần thiết bị chỉnh l-u có điều khiển khâu tỉ lệ có quán tính bậc với số thời gian T1 Bài Tập Dài Điều Khiển ... học đối t-ợng vòng điều khiển tốc độ Khi thiết kế vòng điều khiển bên để đảm bảo hệ thống hoạt động tốt ta chon chu kì trích mẫu gấp 10 lần chu kì vòng điều khiển dòng Với điều khiển dòng ta coi...
Ngày tải lên: 01/12/2015, 21:00

Bài tập lớn ĐIỀU KHIỂN CHUYỂN ĐỘNG RÔBÔT BẰNG ĐỘNG CƠ BƯỚC
... kế mơ hình động +Viết chương trình điều khiển II.Sơ đồ khối hệ thống Khối điều khiển Khối học III.Thiết kế phân tích ngun lý khối 1.Khối điều khiển Để điều khiển chuyển động động theo ý muốn ... động động + Điều khiển động bước theo đường ( cảm ứng quang) CHƯƠNG II THIẾT KẾ I.Nhiệm vụ thiết kế - Thiết kế điều khiển chuyển động rơbơt động bước Vậy ta làm bước sau: +Mạch điều khiển động ... mạch điều khiển động trên, chúng em lại muốn phát triển thêm việc điều khiển rơbốt.Rơbốt chuyển động theo đường định người lập trình khơng thể linh hoat tình huống.Vì vậy, chúng em muốn điều khiển...
Ngày tải lên: 10/09/2012, 11:47

Bài tập lớn điều khiển truyền động điện
... ngoại vi: Với: T1 : rơ le trung gian điều khiển công tắc tơ K T2,T3,T4,T5,T6 : rơ le trung gian tương ứng điều khiển công tắc tơ 1G,2G,3G,4G,5G 4.Chương trình điều khiển dạng LAD: Giả sử thời gian ... 2: Lập sơ đồ nguyên lý điểu khiển cấp tốc độ động không đồng Rotor dây quấn có công suất lớn có đổi chiều quay .Điều khiển theo nguyên tắc thời gian Lập sơ đồ điều khiển PLC Trả lời I Tư xây dựng ... Tín hiệu đưa từ PLC để điều khiển: Tín hiệu để đóng /cắt điện công tắc tơ K,iG dùng PLC có CPU AC/DC/RLY.Hoặc tín hiệu để đóng /cắt điện rơ le trung gian tương ứng để điều khiển công tơ dùng PLC...
Ngày tải lên: 15/03/2013, 11:03

Bài tâp vi điều khiển
... trình truyền thông nối tiếp hai vi điều khiển để tạo thành hệ thống cho nhấn contact vi điều khiển chủ, led VĐK tớ hiển thị số 0, không nhấn contact vi điều khiển chủ LED VĐK tớ hiển thị số /// ... Design by Lie ĐT5-K11 17 Viết chương trình truyền thông nối tiếp hai vi điều khiển để tạo thành hệ thống cho nhấn contact vi điều khiển chủ, led VĐK tớ sáng, ngược lại #include #include ... Industry Design by Lie ĐT5-K11 21 Thiết kế mạch viết chương trình điều khiển tốc độ động chiều dùng PWM ( sử dụng công tắc để điều khiển tăng giảm tốc độ động cơ) ///////////////////////////// Dieu...
Ngày tải lên: 18/09/2013, 23:12

Bài tập lớn điều khiển số - Dũng
... Bài tập lớn môn: ĐIỀU KHIỂN SỐ a) Tìm miền giá trị a b để hệ thống hoàn toàn điều khiển được: Từ hệ: (*) Ta có ma trận sau : Để hệ thống hoàn toàn điều khiển ma trận điều khiển full ... Quốc Lực % Đáp ứng xung hệ thống mở Bài tập lớn môn: ĐIỀU KHIỂN SỐ >> step(sysD_cl) Học viên: Nguyễn Quốc Lực %Đáp ứng xung hệ thống đóng 10 Bài tập lớn môn: ĐIỀU KHIỂN SỐ >> pole(sysD_cl) ans = ... thống điều khiển hoàn toàn % Hệ thống không quan sát hoàn toàn % Thử với trường hợp a=-b=3 % Hệ thống không điều khiển hoàn toàn % Hệ thống quan sát hoàn toàn % Thử với trường hợp b=0, a=7 Bài tập...
Ngày tải lên: 15/10/2013, 15:38

Bài tập lớn điều khiển số
... gian liên tục Bài thực hành số 2: Tổng hợp vòng điều chỉnh dòng phần ứng (điều khiển mômen quay) Sơ đồ vòng điều chỉnh dòng phần ứng ĐCMC Hàm truyền đạt mô hình đối tượng điều khiển dòng Ghi= ... tượng điều khiển đuổi kịp giá trị đặt đại lượng chủ đạo Kết thúc chu kì trích mẫu đầu đạt tới giá trị x1 điều khiển ( =2 ) Kết thúc chu kì trích mẫu thứ đầu đạt tới giá trị x1+x2 điều khiển ( ... trích mẫu thứ đầu đạt tới giá trị x1+x2 điều khiển ( =3 ) Bài thực hành số 3: Tổng hợp vòng điều chỉnh tốc độ quay Hàm truyền đối tượng điều khiển tốc độ có dạng: Gn=Gi*kM*ψ*(1/(2П*J*s) Đáp ứng bước...
Ngày tải lên: 15/10/2013, 15:39
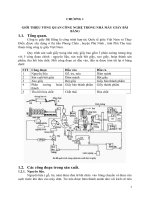
Bài tập lớn Điều khiển hệ thống sấy trong quá trình xeo của nhà máy giấy Bãi Bằng
... điều khiển phía vòng điều khiển áp suất nhóm lô sấy Bộ điều khiển thường dùng cho điều khiển áp suất PI PID Vòng điều khiển bù giá trị thời gian chết (dead-time), thường sử dụng điều khiển IMC (điều ... tới điều khiển áp suất nhóm Như trình bày trên, vòng điều khiển độ ẩm tờ giấy vòng điều khiển cascade, sơ đồ khối vòng điều khiển sau: Hình 22: Cấu trúc mạch vòng điều khiển độ ẩm Trong vòng điều ... vòng điều khiển áp suất sấy 3.4.1 Mạch vòng điều khiển áp suất sấy với điều khiển PI PID 23 Hình 25: Sơ đồ khối mạch vòng điều khiển cho đối tượng IPZ 3.4.2 Mạch vòng điều khiển áp suất sấy với điều...
Ngày tải lên: 15/10/2013, 15:58

Bài tập lớn Điều khiển sấy trong Nhà máy giấy Full
... điều khiển phía vòng điều khiển áp suất nhóm lô sấy Bộ điều khiển thường dùng cho điều khiển áp suất PI PID Vòng điều khiển bù giá trị thời gian chết (dead-time), thường sử dụng điều khiển IMC (điều ... tới điều khiển áp suất nhóm Như trình bày trên, vòng điều khiển độ ẩm tờ giấy vòng điều khiển cascade, sơ đồ khối vòng điều khiển sau: Hình 22: Cấu trúc mạch vòng điều khiển độ ẩm Trong vòng điều ... vòng điều khiển áp suất sấy 3.4.1 Mạch vòng điều khiển áp suất sấy với điều khiển PI PID 23 Hình 25: Sơ đồ khối mạch vòng điều khiển cho đối tượng IPZ 3.4.2 Mạch vòng điều khiển áp suất sấy với điều...
Ngày tải lên: 15/10/2013, 15:58

Bài tập lớn - Điều khiển số - Điều khiển tự động
... điều khiển điều khiển vi điều khiển Giá trị điện áp động điều chỉnh huặc biên độ điện áp chiều – chỉnh lưu điều khiển huặc băm xung áp.Điện áp điều chỉnh điều chỉnh thời gian đóng khoá S.huặc điều ... phương pháp điều khiển tốc độ : phương pháp điều khiển vectơ phương pháp điều khiển vectơ không gian Phương pháp điều khiển véc tơ không gian sử dụng xây dựng thuật toán biến tần Điều khiển tự động ... việc thiết kế hệ điều khiển cho động xoay chiều phức tạp chi phí cao so với động chiều, nhờ phát triển mạnh công nghệ điều khiển số Điều khiển tự động 2- K43 Bài tập lớn Điều khiển số kỹ thuật...
Ngày tải lên: 23/10/2013, 13:15

bài giảng môn điều khiển robot
... triển Robot trải qua hệ: - Playback Robot : Robot lặp - Servo controlled Robot : Robot điều khiển dạng servo - Vision controlled Robot (có sử dụng Camera) - Adaptively – controlled Robot : Robot ... chuyển động đóng mở bàn kẹp, thông thường số bậc tự số khớp Robot - Theo phương pháp điều khiển: + Điều khiển điểm (point to point) + Điều khiển theo quỹ đạo liên tục(continuos path) - Theo hệ thống ... lượng tải/khối lượng Robot < 1) - Tốc độ hoạt động thường không cao thời gian để điều khiển tương đối lớn - Độ xác điều khiển phụ thjuộc vào nhiều yếu tố môi trường( nhiệt độ Robot < 450C) b, Xu...
Ngày tải lên: 18/12/2013, 08:10

Tài liệu Bài tập lớn điều khiển số doc
... 2 Bài tập lớn Điều khiển số Tín hiệu vào đối tượng điều khiển tín hiệu liên tục, tín hiệu vào máy tính tín hiệu số Trên sở sơ đồ khối hệ thống điều khiển số xây dựng sơ đồ khối hệ thống điều khiển ... Bài tập lớn Điều khiển số 17 Các khoá S khoá bán dẫn truyền động công suất nhỏ thường dùng tranzitor Việc khoá (ngắt) van thực mạch đặc biệt dùng tụ điện dùng xung điều khiển điều khiển vi điều ... Máy tính Biến tần Mã hoá Động 10 Bài tập lớn Điều khiển số Sơ đồ mạch card điều khiển máy tính(see the figure) Nguyên lý làm việc card ghép nối máy tính điều khiển : Bộ vi xử lý có nhiệm vụ tính...
Ngày tải lên: 22/12/2013, 16:15

Bài Tập Lớn Điều Khiển Số
... S)S , Ta chọn Suy theo tiêu chuẩn modul tối ưu đối xứng, điều khiển vị trí khâu PI Tổng hợp điều khiển miền gián đoạn a) Tổng hợp khâu điều chỉnh dòng điện theo Dead – Beat Hàm truyền đối tượng ... 1+TAs IA N Tm Kt TL - B+JS Từ ta xây dựng cấu trúc chung mạch vòng điều khiển dòng điện, tốc độ, vị trí sau: tổng hợp điều khiển miền liên tục a) Tổng hợp mạch vòng dòng điện miền liên tục: Bỏ ... ta chọn τ=T ω ⇒RN= J 1+ S Bf Kω ∗2T S(1+T S) (1+T ω S) ω ω = suy theo tiêu chuẩn modul tối ưu điều khiển tốc độ khâu PI Từ suy F N= N ph N sp = 1+2ST ω+2T ω s ⇒ N N sp = 1/K N 1+2ST ω +2T ω s2...
Ngày tải lên: 31/12/2013, 22:44

Tài liệu Bài tập lớn Điều khiển số 1 ppt
... điều khiển điều khiển vi điều khiển Giá trị điện áp động điều chỉnh huặc biên độ điện áp chiều – chỉnh lưu điều khiển huặc băm xung áp.Điện áp điều chỉnh điều chỉnh thời gian đóng khoá S.huặc điều ... phương pháp điều khiển tốc độ : phương pháp điều khiển vectơ phương pháp điều khiển vectơ không gian Phương pháp điều khiển véc tơ không gian sử dụng xây dựng thuật toán biến tần Điều khiển tự động ... việc thiết kế hệ điều khiển cho động xoay chiều phức tạp chi phí cao so với động chiều, nhờ phát triển mạnh công nghệ điều khiển số Điều khiển tự động 2- K43 Bài tập lớn Điều khiển số kỹ thuật...
Ngày tải lên: 19/01/2014, 14:20

Tài liệu Bài tập lớn Điều khiển số doc
... bằng: I = Quách Kỳ Lân Điều khiển tự động 2- K43 U ref R , ; etc Bài tập lớn Điều khiển số Sơ đồ tương đương : Quách Kỳ Lân Điều khiển tự động 2- K43 14 15 Bài tập lớn Điều khiển số Cách đấu điện ... tụ điện dùng xung điều khiển điều khiển vi điều khiển Giá trị điện áp động điều chỉnh huặc biên độ điện áp chiều – chỉnh lưu điều khiển huặc băm xung áp.Điện áp điều chỉnh điều chỉnh thời gian ... hoá Sơ đồ mạch card điều khiển máy tính(see the figure) Quách Kỳ Lân Điều khiển tự động 2- K43 Động 11 Bài tập lớn Điều khiển số Nguyên lý làm việc card ghép nối máy tính điều khiển : Bộ vi xử lý...
Ngày tải lên: 19/01/2014, 14:20

Tài liệu Bài tập lớn Điều khiển số 1 LỜI NÓI ĐẦU Trong những năm gần đây công pdf
... tụ điện dùng xung điều khiển điều khiển vi điều khiển Giá trị điện áp động điều chỉnh huặc biên độ điện áp chiều – chỉnh lưu điều khiển huặc băm xung áp.Điện áp điều chỉnh điều chỉnh thời gian ... pháp điều khiển tốc độ : phương pháp điều khiển vectơ phương pháp điều khiển vectơ không gian Phương pháp điều khiển véc tơ không gian sử dụng xây dựng thuật toán biến tần Quách Kỳ Lân Điều khiển ... ω ω = ( ) x (1 − ) ΔPr max ω0 ω0 Quách Kỳ Lân Điều khiển tự động 2- K43 Bài tập lớn Điều khiển số Việc điều chỉnh điện áp stato triệt để đặc tính điều chỉnh qua điểm không tải lý tưởng, tổn thất...
Ngày tải lên: 19/01/2014, 14:20

Bài tập môn điều khiển tự động pot
... hệ thống với tham số tính toán tối ưu tìm được: 13 - Độ điều khiển: δ max =1.65% - Thời gian độ: 241(s) KẾT LUẬN Các tham số tối ưu điều khiển PID ứng với đối tượng cho là: Kp = 0.7757 Ki = 0.0071 ... >> step(wkinp) - Sau hiệu chỉnh có: + Độ điều chỉnh δ max = 1.24% + Thời gian độ: 239 (s) + Thời gian tăng tốc: 112 (s) 2/ Khảo sát hệ thống với luật điều chỉnh tỉ lệ – tích phân PI Chương trình ... step(wkinpi) Sau hiệu chỉnh ta có: - Độ điều chỉnh: δ max = 1.94% - Thời gian độ: 286 (s) - Thời gian tăng tốc: 148 (s) 3/ Khảo sát hệ thống với luật điều chỉnh PID: Chương trình Matlab sau:...
Ngày tải lên: 22/06/2014, 01:20

Bạn có muốn tìm thêm với từ khóa: