đatn ngành tự dộng hóa

thiết kế hệ thống điều khiển tự động hệ thống chưng cất hệ acid fomic - acid acetic
... trước Điều chỉnh thực tay tự động Ở điều chỉnh tay tác động lên đối tượng thông qua công cụ thừa hành người thực điều chỉnh tự động, tác động lên đối tượng thực công cụ tự động đặc biệt vòng khép ... tượng thực công cụ tự động đặc biệt vòng khép kín tạo nên hệ thống điều chỉnh tự động Trong hệ thống điều khiển tự động tồn thành phần bản: Đối tượng điều chỉnh: thiết bò công nghệ có hay nhiều ... nghệ III Các thông số tháp chưng cất Chương III: Tổng quan hệ thống điều khiển tự động 10 I Khái niệm 10 II Phương thức điều khiển 11 III Cấu trúc...
Ngày tải lên: 05/12/2012, 12:08

thiết kế hệ thống tời kéo dây tải điện
... đoạn kéo dây tải điện lên trụ điện, để tiếp tục kéo dây tải điện đoạn truyền tải lại ta thực tương tự giai đoạn + Giai đoạn kéo căng dây để lấy độ võng: Sơ đồ kéo căng dây tải điện để lấy độ võng ... S1 = S e f α = S e 2πf n Suy ra: n = Trong đó: lg S max − lg S 2π f lg e (4.3) e – số lôgarit tự nhiên e = 2,718; f – hệ số ma sát cáp bề mặt tang, (f = 0,1÷0,2); α – góc ôm dây, α ≈ 2πn; n ... xương đĩa qua phần tử đàn hồi phận giảm dao động xoắn Chế độ lắp phải đảm bảo cho đĩa dịch chuyển tự trục Moay phải có chiều dài tương đối lớn để giảm độ đảo đĩa Vật liệu moay thường thép 40, 40X...
Ngày tải lên: 01/05/2013, 17:20

Tự động xóa thông tin cá nhân khi đóng Firefox potx
... nhấn OK lần để lưu thiết lập Từ nay, sử dụng xong Firefox đóng lại, liên quan đến thông tin bạn tự động xóa, người khác lần ...
Ngày tải lên: 12/03/2014, 07:20

thiết kế bãi đỗ xe tự động lấy thông số từ máy tính
... khó khăn Ngày với phát triển ngành khoa học kỹ thuật, kỹ thuật điện tử mà kỹ thuật số đóng vai trò quan trọng lĩnh vực khoa học kỹ thuật, quản lí, cơng nghiệp tự động hóa, cung cấp thơng tin… phải ... chung phát triển kỹ thuật điện tử nói riêng Áp dụng thành tựu khoa học ta sử dụng phương tiện hồn tồn tự động để điều khiển bãi đỗ xe tự động, khơng giảm nhân lực , đáp ứng kinh tế mà kiểm sốt ... Khi cần thay đổi số đếm người sử dụng cần nhập số đếm ban đầu vào mạch tự động đếm Khi số xe đếm với số đếm ban đầu mạch tự động dừng Từ suy mục đích u cầu đề tài: -Số đếm phải xác, thay đổi việc...
Ngày tải lên: 14/04/2014, 10:44

Nghiên cứu thiết kế chế tạo một số thiết bị tự động đo thông số thủy - hải văn
... công tác:Viện Tự động hóa- KTQS Địa tổ chức: 89b –Lý Nam Đế- Hà Nội Địa nhà riêng:114E8 Thanh Xuân Bắc Hà Nội Tổ chức chủ trì đề tài/dự án: Tên tổ chức chủ trì đề tài: Viện Tự động hóa -KTQS Điện ... đối hoàn chỉnh tự động đo lường truyền số liệu trung tâm, đảm bảo cho việc xây dựng trạm thuỷ văn tự động hoàn toàn Tuy nhiên thiết bị chưa áp dụng cho ngành hải văn tính đặc thù ngành hải văn ... bao gồm thiết bị: - Thiết bị tự động đo độ mặn nhiệt độ Số lượng 01 - Thiết bị tự động đo sóng Số lượng 01 - Thiết bị tự động đo mực nước biển.Số lượng 01 - Trung tâm tự động đo, thu thập, quản...
Ngày tải lên: 23/05/2014, 10:20

Nghiên cứu thiết kế chế tạo thiết, hệ thống tự động hoá thông minh sử dụng tương tác người máy bằng tiếng nói trong điều khiển
... thiết bị hệ thống tự động hoá thông minh sử dụng tương tác người-máy tiếng nói điều khiển Thuộc chương trình KHCN cấp Nhà nước : Nghiên cứu khoa học phát triển công nghệ Tự động hóa, Mã số chương ... nội dung thân thông tin 47 e Tính tương tự chuẩn hóa thông tin Trong phạm vi ứng dụng, hệ thống, qui ước biểu diễn, kí hiệu đơn vị biến phải thống chuẩn hóa Điều cho phép tránh nhầm lẫn, việc ... 221 5.3 Phương pháp chuẩn hóa vec-tơ đặc trưng 221 5.3.1 Phương pháp chuẩn hoá trung bình hệ số giả phổ CMN (Cepstral Mean Normalization) 222 5.3.2 Chuẩn hóa phương sai hệ số giả...
Ngày tải lên: 24/05/2014, 00:18

Luận văn Tính độ rộng kênh và tốc độ truyền cho một kênh đo tự động nhiều thông số
... Phép đo lờng truyền thẳng đo tín hiệu tơng tự hiển thị tín hiệu tơng tự cần đo có dụng cụ hiển thị tín hiệu tơng tự Phép đo lờng số đo tín hiệu dạng tơng tự số hiển thị tín hiệu cần đo hình số cụ ... đo tự động nhiều thông số vô quan trọng Nếu việc tính toán mà thực đợc xác đóng góp lớn cho ngành đo lờng việc xây dựng hệ thống đo đo lúc tự động nhiều thông số, nh lĩnh vực kiểm tra trình tự ... phép đo + Nâng cao tốc độ đo + Loại bỏ sai số đo đọc kết + Thực tự động hóa đợc trình đo + Kiểm tra liên tục, thực chơng trình hóa đợc phép đo kiểm tra thông số kỹ thuật trình sản xuất + Có khả...
Ngày tải lên: 08/07/2014, 11:54

Tự động điền thông tin cá nhân hàng loạt pps
... vựng, bạn miêu tả từ khóa mà lưu lại vào ô Description, cách giúp bạn nhanh chóng nhận dạng từ khóa sử dụng PhraseExpress Bên cạnh đó, người dùng dễ dàng thiết lập phím tắt cho khóa mà lưu lại vơi ... lại vơi chức Hotkey Cuối Autotext Đây chức hữu ích bạn hay gặp vấn đề sai tả Ví dụ, bạn lưu từ khóa bàn tai, bạn thiết lập Autotext cho lại với tả bàn tay Với cách làm này, bạn hạn chế nhiều lỗi...
Ngày tải lên: 07/08/2014, 17:22

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 1 docx
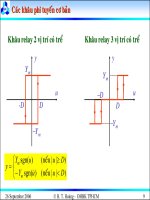
... chương Khái niệm Đònh nghóa Đặc điểm hệ phi tuyến Các khâu phi tuyến đơn giản Mô tả toán học hệ phi tuyến Các phương pháp khảo sát hệ phi tuyến Phương pháp tuyến tính hóa Phương pháp hàm mô tả ... tuyến hệ thống quan hệ vào – mô tả phương trình vi phân/sai phân tuyến tính Phần lớn đối tượng tự nhiên mang tính phi tuyến Hệ thống thủy khí (TD: bồn chứa chất lỏng,…), Hệ thống nhiệt động học ... vào) có thành phần hài bậc cao (là bội số tần số tín hiệu vào) Hệ phi tuyến xảy tượng dao động tự kích 26 September 2006 © H T Hồng - ÐHBK TPHCM Các khâu phi tuyến Khâu relay vò trí Khâu relay...
Ngày tải lên: 08/08/2014, 00:20
Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 2 ppt
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 3 pdf
... thường dùng sau đây: Phương pháp tuyến tính hóa Phương pháp hàm mô tả Phương pháp Lyapunov 26 September 2006 © H T Hồng - ÐHBK TPHCM 18 Phương pháp tuyến tính hóa 26 September 2006 © H T Hồng - ÐHBK ... x2 = − 26 September 2006 x1 = − x2 = + © H T Hồng - ÐHBK TPHCM 21 Tuyến tính hóa hệ phi tuyến xung quanh điểm làm việc tónh Xét hệ phi tuyến mô tả PTTT phi tuyến: & x (t ) ... ) = y (t ) − y y 26 September 2006 (*) ( y = h( x , u )) © H T Hồng - ÐHBK TPHCM 22 Tuyến tính hóa hệ phi tuyến xung quanh điểm làm việc tónh Các ma trận trạng thái hệ tuyến tính quanh điểm làm...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 5 doc
... Điều khiển ổn đònh hóa hệ phi tuyến quanh điểm làm việc tónh r(t) + e(t) PID − ON-OFF u(t) Đối tượng phi tuyến y(t) ... Nếu e(t ) < emin u (t ) = umin 26 September 2006 © H T Hồng - ÐHBK TPHCM 34 Điều khiển ổn đònh hóa hệ phi tuyến quanh điểm làm việc tónh r(t) + e(t) PID u(t) Đối tượng phi tuyến − ON-OFF y(t) ... September 2006 © H T Hồng - ÐHBK TPHCM de(t ) dt 35 Phương pháp hàm mô tả (Phương pháp tuyến tính hóa điều hòa) 26 September 2006 © H T Hồng - ÐHBK TPHCM 36 Phương pháp hàm mô tả Phương pháp hàm...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 6 docx
... Đònh nghóa hàm mô tả Hàm mô tả (hay gọi hệ số khuếch đại phức) tỉ số thành phần sóng hài tín hiệu khâu...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 7 potx
... đònh sang vùng ổn đònh khâu tuyến tính G(jω) 26 September 2006 © H T Hồng - ÐHBK TPHCM 54 Trình tự khảo sát chế độ dao động hệ phi tuyến B1: Xác đònh hàm mô tả khâu phi tuyến (nếu khâu phi tuyến ... (0.2 s + 1)(2s + 1) Khâu phi tuyến khâu relay vò trí có Vm=6 Hãy xác đònh biên độ tần số dao động tự kích hệ (nếu có) 26 September 2006 © H T Hồng - ÐHBK TPHCM f(e) Vm e −Vm 56 ...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 9 pot
... tuyến tính hóa (2) ổn đònh hệ phi tuyến (1) ổn đònh tiệm cận điểm cân xe Nếu hệ thống tuyến tính hóa (2) không ổn đònh hệ phi tuyến (1) không ổn đònh điểm cân xe Nếu hệ thống tuyến tính hóa (2) ... TPHCM 71 Phương pháp tuyến tính hóa Lyapunov Cho hệ phi tuyến phương trình trạng thái: & x = f ( x, u ) (1) Giả sử xung quanh điểm cân xe , hệ thống (1) tuyến tính hóa dạng: ~ = A~ + Bu ~ & x x ... TPHCM 67 Ổn đònh điểm cân Đònh nghóa: Một hệ thống gọi ổn đònh điểm cân xe có tác động tức thời đánh bật hệ khỏi xe đưa đến điểm x0 thuộc lân cận xe sau hệ có khả tự quay điểm cân xe ban đầu Chú...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 10 potx
... Phương pháp tuyến tính hóa Lyapunov – Thí dụ (tt) Mô hình tuyến tính quanh điểm cân xe = [0 0]T ~ ~ & x = A~ + B u x ∂f1 ... (theo hệ tiêu chuẩn Hurwitz) 26 September 2006 © H T Hồng - ÐHBK TPHCM 74 Phương pháp tuyến tính hóa Lyapunov – Thí dụ (tt) Mô hình tuyến tính quanh điểm cân xe = [π ~ ~ & x = A~ + B u x ∂f =0 ... tiếp Lyapunov– Thí dụ (b) π xe = 0 Chọn hàm Lyapunov chứng tỏ hệ thống không ổn đònh (SV tự làm) x2 (t ) f ( x, u ) = g B − sin x1 (t ) − x2 (t ) + u (t ) ml ml l 26 September...
Ngày tải lên: 08/08/2014, 00:20
