BÀI GIẢNG lý THUYẾT ôtômát và NGÔN NGỮ hệ THỐNG


Bài giảng môn lý thuyết ôtômát và ngôn ngữ hình thức - Chương 10 pot
... x1, x2 ∈ Σ* Ngôn ngữ chấp nhận lba tập tất chuỗi chấp nhận lba Ví dụ Ngôn ngữ L = {anbncn: n ≥ 0} ngôn ngữ ràng buộc tuyến tính xây dựng lba chấp nhận Trang 309 Lý thuyết Ôtômát & NNHT - Khoa Công ... Định nghĩa 10. 9 Một ngôn ngữ L Σ gọi đệ qui tồn máy Turing M chấp nhận dừng w ∈ Σ+ Hay nói cách khác ngôn ngữ đệ qui tồn giải thuật thành viên cho Trang 310 Lý...
Ngày tải lên: 23/07/2014, 20:21

Bài giảng môn lý thuyết ôtômát và ngôn ngữ hình thức - Chương 9 pot
... cấu hình khởi đầu x1qx2, máy không dừng Trang 293 Lý thuyết Ôtômát & NNHT - Khoa Công Nghệ Thông Tin Máy Turing chấp nhận ngôn ngữ Định nghĩa 9. 3 Cho M = (Q, Σ, Γ, δ, q0, , F) máy Turing, ngôn ngữ ... riêng biệt Bất kỳ máy dừng, vài hay tất nội dung băng xem kết xuất (output) Trang 291 Lý thuyết Ôtômát & NNHT - Khoa Công Nghệ Thông Tin Hình trạng tức thời Định ng...
Ngày tải lên: 23/07/2014, 20:21

Bài Giảng Môn học: OTOMAT VÀ NGÔN NGỮ HÌNH THỨC
... 1.3 Ngôn ngữ Định nghĩa 1.3 Cho bảng chữ Σ, mỗt tập L ⊆ Σ* gọi ngôn ngữ hình thức (hay ngôn ngữ) bảng chữ Σ Tập rỗng, ký hiệu ∅, ngôn ngữ không gồm từ gọi ngôn ngữ rỗng Vậy ngôn ngữ rỗng ngôn ngữ ... lớp ngôn ngữ quy L3 nhỏ nhất, bị chứa thực sụ lớp ngôn ngữ phi ngữ cảnh L2, lớp ngôn ngữ phi ngữ cảnh lại bị chứa thực lớp ngôn ngữ cảm ngữ cả...
Ngày tải lên: 26/08/2013, 21:20

Bài Giảng Môn học: OTOMAT VÀ NGÔN NGỮ HÌNH THỨC_TS. Nguyễn Văn Định potx
... đưa cho máy ngôn ngữ máy hiểu Việc viết yêu cầu gọi lập trình Ngôn ngữ dùng để lập trình gọi ngôn ngữ lập trình Các ngôn ngữ lập trình ngôn ngữ hình thức Cả ngôn ngữ hình thức lẫn ngôn ngữ tự nhiên ... 1.3 Ngôn ngữ Định nghĩa 1.3 Cho bảng chữ Σ, mỗt tập L ⊆ Σ* gọi ngôn ngữ hình thức (hay ngôn ngữ) bảng chữ Σ Tập rỗng, ký hiệu ∅, ngôn ngữ khôn...
Ngày tải lên: 27/06/2014, 09:20

bài giảng otomat và ngôn ngữ hệ thống
... hữu hạn Ngôn ngữ qui văn phạm Các tính chất ngôn ngữ qui Ngôn ngữ phi ngữ cảnh Đơn giản hóa văn phạm phi ngữ cảnh dạng chuẩn Chương Ôtômát đẩy xuống Chương Các tính chất ngôn ngữ phi ngữ cảnh ... Công Nghệ Thông Tin Giới thiệu Ôtômát Các mô hình tính toán tự động Ngôn ngữ hình thức (formal languages): Định nghĩa Phân loại ngôn ngữ Quan hệ với ôtômát Ứng dụng và...
Ngày tải lên: 23/10/2014, 00:20
Bài giảng lý thuyết kiểm toán chương 6: hệ thống kiểm soát nội bộ và rủi ro kiểm soát
... quát hệ thống kiểm soát nội 6.2.Các mục tiêu chi tiết kiểm soát nội BCTC 6.3.Cơ cấu hệ thống kiểm soát nội 6.4.Tìm hiểu hệ thống kiểm soát nội đánh giá rủi ro kiểm soát 6.1.Khái quát hệ thống kiểm ... quản lý (kiểm soat độc lập với việc thực hiện) Kiểm soát tổng quát: kiểm soát tổng thể nhiều hệ thống, nhiều công việc khác 6.4.Tì...
Ngày tải lên: 29/05/2015, 15:53

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 1 docx
... phi tuyến chia làm hai loại: Hệ phi tuyến liên tục Hệ phi tuyến rời rạc Nội dung môn học đề cập đến hệ phi tuyến liên tục 26 September 2006 © H T Hồng - ÐHBK TPHCM Tính chất hệ phi tuyến Hệ phi ... phi tuyến Hệ phi tuyến hệ thống quan hệ vào – mô tả phương trình vi phân/sai phân tuyến tính Phần lớn đối tượng tự nhiên mang tính phi tuy...
Ngày tải lên: 08/08/2014, 00:20
Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 2 ppt
... δ (t ) ) & τ τ & 2 2 2 (hệ phi tuyến bậc 3) 26 September 20 06 © H T Hồng - ÐHBK TPHCM 14 Mô tả toán học hệ phi tuyến dùng phương trình trạng thái Hệ phi tuyến liên tục mô tả phương ... ) 2 ( J + ml ) ( J + ml ) ( J + ml ) (hệ phi tuyến bậc 2) 26 September 20 06 © H T Hồng - ÐHBK TPHCM 13 Mô tả hệ phi tuyến dùng phương trình vi phân – T...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 3 pdf
... T Hồng - ÐHBK TPHCM 18 Phương pháp tuyến tính hóa 26 September 2006 © H T Hồng - ÐHBK TPHCM 19 Điểm dừng hệ phi tuyến & x (t ) = f ( x (t ), u (t )) Xét hệ phi tuyến mô tả PTTT phi tuyến: ... trạng thái x gọi điểm dừng hệ phi tuyến hệ trạng thái x với tác động điều khiển u cố đònh, không đổi cho trước hệ nằm nguyên trạng thái Nếu ( x , u ) điểm dừn...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 4 pdf
... September 2006 © H T Hồng - ÐHBK TPHCM 31 Điều khiển ổn đònh hóa hệ phi tuyến quanh điểm làm việc tónh Đưa hệ phi tuyến miền xung quanh điểm làm việc tónh (đơn giản dùng điều khiển ON-OFF) Xung quanh ... x2 = u = 1.2 744 Do điểm làm việc tónh cần xác đònh là: x1 π / 6 x= = x2 u = 1.2 744 26 September 2006 © H T Hồng - ÐHBK TPHCM 28 Tuyến t...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 5 doc
... Điều khiển ổn đònh hóa hệ phi tuyến quanh điểm làm việc tónh r(t) + e(t) PID − ON-OFF u(t) Đối tượng phi tuyến y(t) Chọn ĐK Thuật toán điều khiển ON-OFF: Nếu e(t ) > emax ... September 2006 © H T Hồng - ÐHBK TPHCM 34 Điều khiển ổn đònh hóa hệ phi tuyến quanh điểm làm việc tónh r(t) + e(t) PID u(t) Đối tượng phi tuyến − ON-OFF y(t) Chọn ĐK Thuật toán điều...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 6 docx
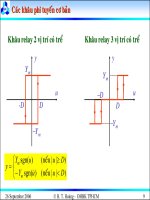
... = = 1− M πM M 26 September 20 06 © H T Hồng - ÐHBK TPHCM 46 Hàm mô tả khâu phi tuyến Khâu khuếch đại bão hòa ch 26 September 20 06 © H T Hồng - ÐHBK TPHCM 47 Hàm mô tả khâu phi tuyến Khâu khuếch ... 4Vm N (M ) = = M πM 26 September 20 06 © H T Hồng - ÐHBK TPHCM 44 Hàm mô tả khâu phi tuyến Khâu relay vò trí 26 September 20 06 © H T Hồng - ÐHBK TPHCM 45 Hàm...
Ngày tải lên: 08/08/2014, 00:20

Bài giảng lý thuyết điều khiển tự động - Hệ thống điều khiển phi tuyến part 7 potx
... T Hồng - ÐHBK TPHCM D sin α = M 52 Khảo sát chế độ dao động hòa hệ phi tuyến Xét hệ phi tuyến có sơ đồ sau: r(t)=0 + − e(t) N(M) u(t) G(s) y(t) Điều kiện để hệ thống có dao động là: ... Hồng - ÐHBK TPHCM 54 Trình tự khảo sát chế độ dao động hệ phi tuyến B1: Xác đònh hàm mô tả khâu phi tuyến (nếu khâu phi tuyến khâu bản) B2: Điều kiện...
Ngày tải lên: 08/08/2014, 00:20