bài 6 thiết kế hệ thống điều khiển liên tục

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 1 doc
... Môn học 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 2 MÔ HÌNH TOÁN HỌC MÔ HÌNH TOÁN HỌC HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC Chương 2 Chương 2 26 September 20 06 © H. T. ... − − − L Hệ thống tuyến tính bất biến liên tục r(t) c(t) n: bậc của hệ thống, hệ thống hợp thức nếu n≥m. a i , b i : thông số của hệ thống 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 6 Một số ... tích, thiết kế các hệ thống điều khiển có bản chất vật lý khác nhau. Cơ sở đó chính là toán học. Quan hệ giữa tín hiệu vào và tín hiệu ra của một hệ thống tuyến tính bất biến liên tục có...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 2 pdf
... thuyết Điều khiển tự động. < ≥ == 0 t 0 0 t sin )().(sin)( nếu nếut tuttf ω ω f(t) t 0 {} 22 )()(sin ω ω ω + = s tutL 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 16 Xét hệ thống mô ... 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 13 Phép biến đổi Laplace (tt) Phép biến đổi Laplace (tt) Biến đổi Laplace của các hàm cơ bản: Hàm nấc đơn vò (step): tín hiệu vào hệ thống điều khiển ... ++++ − − − L Hệ thống tuyến tính bất biến liên tục r(t) c(t) =++++ − − )()()()( 1 1 10 sCassCasCsasCsa nn nn L )()()()( 1 1 10 sRbssRbsRsbsRsb mm mm ++++ − − L 26 September 20 06 © H. T. Hồng...
Ngày tải lên: 07/08/2014, 23:24
Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 6 pps
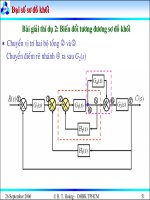
... đương của hệ thống: 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 57 Đại số sơ đồ khối Đại số sơ đồ khối Thí dụ 3 Thí dụ 3 Tính hàm truyền tương đương của hệ thống có sơ đồ khối như sau: 26 September ... khối 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 59 Đại số sơ đồ khối Đại số sơ đồ khối Kết quả thí dụ 3 Kết quả thí dụ 3 Sinh viên tự tính 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 60 Đại ... các hệ thống phức tạp các phép tính này hay bò nhầm lẫn. ⇒ Phương pháp biến đổi tương đương sơ đồ khối chỉ thích hợp để tìm hàm truyền tương đương của các hệ thống đơn giản. Đối với các hệ thống...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 7 pot
... đương của hệ thống: )( 1 332211 ∆+∆+∆ ∆ = PPPG td 272142543225 462 7214 147215 461 54321 1 )1( HGGHGHGGGGHGGGHGGHG HGGGGGGGGGGGGG G td +++++ + + + = 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 66 Sơ đồ ... đương của hệ thống có sơ đồ dòng tín hiệu như sau: Giải: Đường tiến: Vòng kín: 543211 GGGGGP = 5 461 2 GGGGP = 7213 GGGP = 141 HGL − = 2722 HGGL − = 25 463 HGGGL − = 254324 HGGGGL − = 26 September ... nút nguồn đến một nút đích của hệ thống tự động biểu diễn bằng sơ đồ dòng tín hiệu được cho bởi: ∑ ∆ ∆ = k kk PG 1 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 64 Sơ đồ dòng tín hiệu Sơ đồ dòng...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 9 pps
... trang 67 -68 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 86 Cách thành lập PTTT từ PTVP Cách thành lập PTTT từ PTVP Thí dụ trường hợp 2 Thí dụ trường hợp 2 Viết PTTT mô tả hệ thống có quan hệ vào ... trang 64 -65 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 82 Cách thành lập PTTT từ PTVP Cách thành lập PTTT từ PTVP Thí dụ trường hợp 1 Thí dụ trường hợp 1 Viết PTTT mô tả hệ thống có quan hệ vào ... − n n β β β β 1 2 1 M B 26 September 20 06 © H. T. Hồng - ÐHBK TPHCM 85 Cách thành lập PTTT từ PTVP Cách thành lập PTTT từ PTVP Trường hợp 2 (tt) Trường hợp 2 (tt) Các hệ số β trong vector B xác...
Ngày tải lên: 07/08/2014, 23:24

Tài liệu Đặc tính động học của hệ thống ppt
... ng ng ti m c n Giả sử hàm truyền hệ thống có dạng: G ( s ) Ks G1 ( s )G2 ( s )G3 ( s ) ( >0: h ä th cóù kh âu vi phâân l ù tư ûng hệ thố khâ i h lý tưở
Ngày tải lên: 17/02/2014, 17:20

Khảo sát đặc tính động học hệ thống
... Ngõ vào Analog Input nhận tín hiệu điều khiển analog để xuất tín hiệu điều rộng xung tới động Các ngõ analog sử dụng thí nghiệm thiết kế điều khiển PID liên tục Hình Sơ đồ phần cứng thí nghiệm ... Ar (3) Và độ lệch pha ngõ ngõ vào là: 360 0 360 0 ∠G ( jω ) = ϕc − ϕr = Δt = ω.Δt 2π T (4) 2.2 Đáp ứng tần số hệ thống bậc đầu vào hình sine Hàm truyền hệ thống bậc có dạng: G (s) = Y (S ) K = ... -8 - 46 1.00 Trang IV/ Hình 11 Vẽ đáp ứng tần số hệ thống bậc 4.2 Khảo sát đặc tính tần số hệ thống bậc Lặp lại bước mô mục 4.1 thêm vào mô hình động DC khâu tích phân lý tưởng Hình 12, ghi kết...
Ngày tải lên: 28/03/2014, 13:26

KHÁI NIỆM VỀ TÂM LÝ Y HỌC pps
... nhân trình xuất bệnh điều trị vai trò yếu tố tâm lý dự phòng 26 B Phân tích tâm lý bệnh thần kinh C Vai trò yếu tố tâm lý dự phòng D Tâm lý người bệnh E Yếu tố tâm lý trình điều trị Nghiên cứu ... thầy thuốc nhân viên y tế, tâm lý giao tiếp, không khí tâm lý sở điều trị B Một số nhiệm vụ chung tâm lý y học C Vai trò tâm lý điều trị D Vai trò tâm lý phòng bệnh E Ảnh hưởng bệnh tâm lý 14 ... lý y học, tâm lý học D Tâm lý lao động E Tâm lý cá nhân Nghiên cứu vai trò yếu tố tâm lý trình điều trị, trình xuất diễn biến bệnh đối tượng @A Tâm lý y học B Tâm lý học C Tâm lý y học, tâm lý...
Ngày tải lên: 26/07/2014, 05:21

KHÁI NIỆM về THỐNG KÊ Y HỌC và CÁCH SẮP XẾP & TỔ CHỨC SỐ LIỆU pdf
... từ bụng 57 bệnh nhân : 68 63 42 27 30 36 28 32 79 27 22 23 24 25 44 65 43 25 74 51 36 42 28 31 28 25 45 12 57 51 12 32 49 38 42 27 31 50 38 21 16 24 69 47 23 49 28 23 19 46 30 43 49 12 Lập bảng ... 49,5 13 49,5 – 59,5 59,5 – 69 ,5 69 ,5 – 79,5 Taà soá n 20 18 16 14 12 10 Lập biểu đồ đa giác tần số 9,5 19,5 29,5 39,5 49,5 59,5 69 ,5 79,5 X Biểu đồ đa giác tần số thiết lập dựa histogram Bằng ... 0,0877 20 – 29 19 24 0,3333 0,4210 30 – 39 10 34 0,1754 0,5 964 40 – 49 13 47 0,2281 0,8245 50 – 59 51 0,0702 0,8947 60 – 69 55 0,0702 0, 964 9 tương 70 – 79 57 57 0,0351 1,0000 1,0000 Lưu ý: Tùy theo...
Ngày tải lên: 26/07/2014, 12:21

tổng hợp mạch vòng tốc độ của hệ truyền động động cơ một chiều kích từ độc lập theo phương pháp tối ưu modul và tối ưu đối xứng. đánh giá quá trình quá độ và đặc tính động học của hệ kín
... ta hay gặp hệ thống điều chỉnh tốc độ cho truyền động điện chiều có đảo chiều Hệ thống điều chỉnh tốc độ hệ thống mà đại lượng điều chỉnh tốc độ góc động điện, hệ thường gặp Hệ thống điều chỉnh ... chỉnh tốc độ hình thành từ hệ thống điều chỉnh dòng điện Các hệ thống đảo chiều không đảo chiều Do yêu cầu công nghệ mà hệ cần đạt vô sai cấp vô sai cấp hai Nhiễu hệ mômen tải Mc Mục đích nghiên ... (U KF ) (1.15) (1. 16) Từ biểu thức ta thấy, điều chỉnh dòng điện kích thích máy phát điều chỉnh tốc độ không tải hệ thống Chế độ làm việc Trong hệ thống phần tử phi tuyến nên hệ có đặc tính động...
Ngày tải lên: 18/12/2014, 15:20

BÀI 16; KHÁI NIỆM VỀ LIÊN KẾT HÓA HỌC. LIÊN KẾT ION (10NC)
... CỐ BÀI HỌC 1/ Hãy biểu diễn hình thành ion nguyên tử:Al(Z=13), K(Z=19), Ca(Z=20), S(Z= 16) , N(Z=7) Al: 1s22s22p63s23p1 13 K: 1s22s22p63s23p64s1 19 Ca: 1s22s22p63s23p64s2 20 S: 1s22s22p63s23p4 16 ... ion phân tử nguyên tử Xét hình thành liên kết ion phân tử natri clorua (NaCl) Sơ đồ: Na 1s22s22p63s1 + Cl 1s22s22p63s23p5 Na+ 1s22s22p6 + Cl- 1s22s22p63s23p6 Hai ion tạo thành mang điện tích ngược ... NaCl: Na+ + Cl- NaCl Na 1s22s22p63s1 + Cl + Cl- Na+ 1s22s22p63s23p5 1s22s22p6 11+ + Na NaCl NaCl Na + + Cl- 1s22s22p63s23p6 17+ 17+ Cl NaCl b Sự tạo thành liên kết ion phân tử nhiều nguyên tử...
Ngày tải lên: 12/02/2015, 10:00

Bài giảng điều khiển tự động chương 3 đặc tính động học
... Tín hiệu sai số điều khiển Tín hiệu điều khiển - Bộ điều khiển liên tục : Cơ khí, khí nén, mạch điện, op-amp,… - Bộ điều khiển ON-OFF : Rơle điện, Rơle khí nén, PLC,… - Bộ điều khiển số: phần ... 35 3.4 Đặc tính động học điều khiển Bộ điều khiển (bộ điều chỉnh, khâu hiệu chỉnh) sử dụng để biến đổi hàm truyền hiệu chỉnh lại đặc tính động học hệ thống, làm cho hệ có đáp ứng thoả mãn yêu ... vít-đai ốc bàn máy, hệ van nước-bể chứa,… Một đối tượng điều khiển, điều khiển, hay toàn hệ thống mô tả khâu động học nhiều khâu động học kết nối lại 10/31/2014 3.0 Giới thiệu chung Đặc tính...
Ngày tải lên: 05/12/2015, 22:40

Tài liệu Chương 1: Một số khái niệm về Tin học và Máy tính điện tử doc
... Phần mềm: chương trình (program) điều khiển hoạt động phần cứng máy tính Phần mềm máy tính chia làm loại: - Phần mềm Ví dụ: Hệ điều hành - Phần mềm ứng dụng: 16 Khái niệm phần cứng, phần mềm ... Hệ thống máy tính Khái niệm Tin học Tin học ngành khoa học công nghệ nghiên cứu phương pháp, trình xử lý thông tin cách tự động dựa ... phần cứng, phần mềm Phần mềm bản: gồm tập hợp chương trình điều khiển hoạt động máy tính cho phép người sử dụng khai thác dễ dàng hiệu thiết bị máy tính Phần mềm bắt buộc phải có để máy tính sử...
Ngày tải lên: 13/12/2013, 13:16