TÌM HIỂU VỀ CẤU TẠ̣O CỦA ROBOT mitsubishi rv-4f
Hệ thống truyền động
Robot mistubishi RV-4F có hệ thông truyền động là các động cơ sever có mômen và công suất lớn được đạt tại các khớp nối. Đối với loại robot công nghiệp này hệ thống truyền động được dùng là loại AC servo bao gồm có:
Có nhiệm vụ là nhận thông tin từ bộ điều khiển trung tâm và chuyển thành tín hiệu để điều khiển một cách chính xác số vòng quay của động cơ và để nhận tín hiệu từ các cảm biến trên động cơ và truyền đến bộ xử lý trung tâm
SVTH: PHẠM NGUYỄN HOÀNG KỲ
Là loại động cơ bước nhưng được chế tạo và bổ sung nhiều công nghệ để có độ ổn định lớn, độ chính xác cao và cho ra mômen lớn phù hợp với các yêu cầu thực tế Các động cơ servo thường được gắn thêm hộp giảm tốc để tăng thêm mômen xoắn lên trục giúp di chuyển các cơ cấu khỏe hơn. Để tăng mômen truyền tải cho động cơ servo người ta thường gắn thêm các hộp số giảm tốc và để tăng khả năng tự hãm của động cơ Hộp số giảm tốc thường dùng ở động cơ servo là hộp số giảm tốc bánh răng hành tinh (Planetary Gear), hộp giảm tốc Harmonic, hộp giảm tốc trục vít bánh vít. Đối robot Robot mistubishi RV-4F thì được sửa dụng loại động cơ servo AC servo mistubishi MR- J2 có công suất cao từ 0,05-400W được tích hợp sẵn driver điều khiển có thể cài đặt tốc độ và số vòng quay theo một giá trị nhất định, bên trong mỗi motor servo đề tích hợp một phanh điện để có thể dừng động cơ ở các vị trị được thiết lập.
SVTH: PHẠM NGUYỄN HOÀNG KỲ
Bên trong hộp giảm tốc bánh răng hành tinh
Cấu tạo hộp giảm tốc harmonic
SVTH: PHẠM NGUYỄN HOÀNG KỲ
Cấu tạo của phanh điện khi có dòng điện đi qua thì nam châm điện hút thanh sắt làm ép lò xo xuống, khi đó sẽ tạo ra khoảng cách đĩa phanh ở trên trục có thể quay.
Khi không có dòng điện đi qua thì lò xo sẽ đẩy thanh sắt gắn má phanh và kẹp chặt đĩa phanh vào 2 má phanh động cơ sẽ dùng.
Tín hiệu dòng điện điều khiển nam châm điện trong phanh điện được phát ra từ driver điều khiển của động cơ do người dùng viết chương trình điều khiển.
Hệ thống điều khiển
Để điều khiển được chuyển động ở các khâu của robot ở từng khâu mỗi động cơ servo được trang bị một driver giúp nhận và truyền đạt tín hiệu từ các bộ điều khiển trung tâm đến động cơ và nhận tín hiệu từ các cảm biến từ động cơ và truyền dữ liệu lại về bộ xử lý trung tâm.
SVTH: PHẠM NGUYỄN HOÀNG KỲ
Bộ điều khiển trung tâm trên robot là khối PLC: sự chuyển động của robot đến các vị trí nhất định, tuần tự hoặc thay đổi theo chu kì được người sửa dụng lập trình qua bộ điều khiển PLC PLC được xem như là bộ não trung tâm của robot công nghiệp, ở đây sẽ phát ra các tín hiệu đưa đến các driver, tại các driver sẽ xử lý tín hiệu đến truyền đạt đến động cơ để thực thi theo đúng yêu cầu của người lập trình Trong quá trình thực thi đó người dùng có thể lập trình các bộ cảm biến để thu thập các thông tin và truyền đạt về PLC để đưa ra các giá trị tọa độ khảo sát.
Mô hình điều khiển một số hệ thống:
SVTH: PHẠM NGUYỄN HOÀNG KỲ
Sơ đồ đấu nối động cơ Servo- Driver-PLC
Một PLC cơ lớn công nghiệp có thể có nhiều ngõ ra để điều khiển cùng một lúc nhiều động cơ servo Ngoài ra ở nghành công nghiệp hiện đại ngày nay có thể kết nối nhiều PLC thành một hệ thống mạng truyền thông công nghiệp để có thể tự động hóa hoàn toàn việc sản xuất nơi mà robot sẽ thay thế con người làm những công việc có tính liên tục và độc hại.
Hệ thống cảm biến
Trên robot mitsubishi RV-4FRL riêng và đa số các loại robot công nghiệp nói chung được trang bị khá nhiều loại cảm biến phục vụ cho từng nhu cầu sửa dụng nhất định.
Những loại cảm biến bắt buộc phải có trên robot công nghiệp đó là: các encoder, cảm biến tiệp cậnvà một số loại cảm biến chuyên dụng cho từng nhu cầu sửa dụng.
Encoder: các encoder dùng để mã hóa số vòng quay và truyền dữ liệu đó đến driver, ở đó driver sẽ xử lý xác định được vị trí của tương đối của từng vòng quay
SVTH: PHẠM NGUYỄN HOÀNG KỲ
Cảm biến tiệm cận: dùng để xác định khoảng cách giữa các vật Trong robot công nghiệp thường dùng để xác định các vị trí gốc, các vị trí max min
Một số loại cảm biến khác thường gặp: Đầu dò độ nhám bề mặt cảm biến áp suất
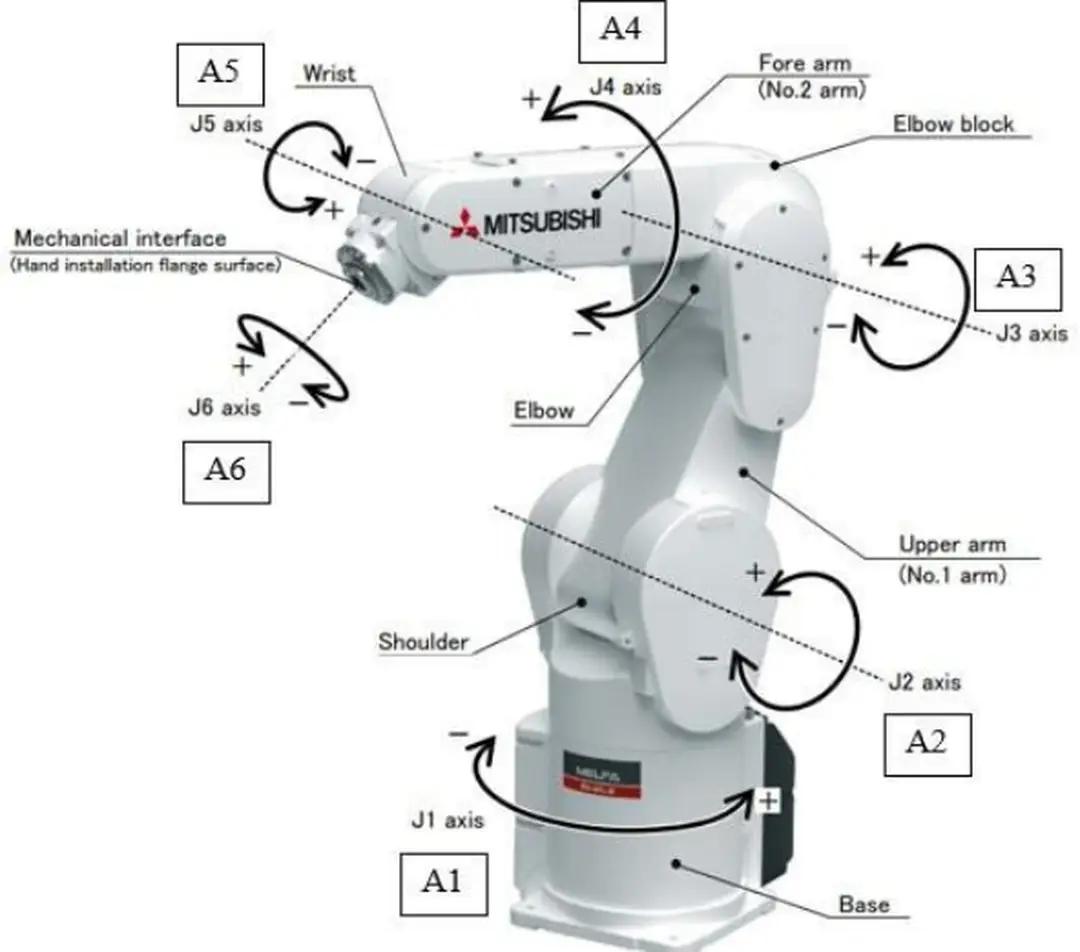
XÁC ĐỊNH SỐ BẬC TỰ DO CỦA ROBOT
Robot mistubishi RV-4FRL thuộc loại robot công nghiệp có tới 6 bậc tự do 3 bậc chuyển động cơ bản – định vị các vị trí cơ bản 3 bậc chuyển động bổ sung – đinh hướng chuyển động
SVTH: PHẠM NGUYỄN HOÀNG KỲ
BÀI TOÁN ĐỘNG HỌC THUẬN ROBOT
Bộ thông số DH
Ta xây dựng mối quan hệ động học thông qua bộ thông số DH :
Theo Denavit & Hartenberg, hai ông đã đề xuất dùng ma trận thuần nhất 4x4 để mô tả quan hệ giữa 2 khâu liên tiếp trong cơ cấu không gian.
Trước hết, xác định bộ thông số cơ bản giữa 2 trục quay của 2 khớp động i+1 và i:
- ai là độ dài đường vuông góc chung giữa 2 trục khớp động i+1 và i,
- i là góc chéo giữa 2 trục khớp động i+1 và i,
- di là khoảng cách đo dọc trục khớp động i kể từ đường vuông góc chung giữa trục khớp động i+1 và trục khớp động i tới đường vuông góc chung giữa trục khớp động i và trục khớp động i-1.
- θi là góc giữa 2 đường vuông góc nói trên.i là góc giữa 2 đường vuông góc nói trên.
Khâu θi là góc giữa 2 đường vuông góc nói trên 1 d i a i αii Khớp
1 θi là góc giữa 2 đường vuông góc nói trên 1 0 0 90 o R
2 θi là góc giữa 2 đường vuông góc nói trên 2 0 a 2 #5 0 o R
3 θi là góc giữa 2 đường vuông góc nói trên 3 0 a 3 P 90 o R
4 θi là góc giữa 2 đường vuông góc nói trên 4 d 4 '5 0 -90 o R
5 θi là góc giữa 2 đường vuông góc nói trên 5 0 0 90 o R
6 θi là góc giữa 2 đường vuông góc nói trên 6 d 6 0 0 o R
Mô hình biến đổi
Trên cơ sở đã xây dựng các hệ tọa độ với 2 khâu động liên tiếp như trên đã trình bày, ta có thể thiết lập mối quan hệ giữa 2 hệ tọa độ liên tiếp theo 4 bước sau đây:
1 - Quay quanh trục zi-1 một góc θi là góc giữa 2 đường vuông góc nói trên.i
2 - Tịnh tiến dọc trục zi-1 một đoạn di
3 - Tịnh tiến dọc trục xi-1 (đã trùng với xi) một đoạn ai 4 - Quay quanh trục xi một góc αii.
Bốn bước này được biểu diễn bằng tích các ma trận thuần nhất sau: Ai = R(z,θi là góc giữa 2 đường vuông góc nói trên.i).Tp(0,0,di).Tp(ai,0,0).R(x,αii) (2.1)
Sau khi thực hiện các phép nhân các ma trận đơn giản (quay, tịnh tiến), ta có:
Thay các giá trị trong bảng DH vào công thức Ai ta tính được các ma trận
Với C i = cos θi là góc giữa 2 đường vuông góc nói trên i S i = Sin θi là góc giữa 2 đường vuông góc nói trên i
SVTH: PHẠM NGUYỄN HOÀNG KỲ
Ma trận Ti là tích các ma trận Ai và là ma trận mô tả vị trí và hướng của hệ tọa độ gắn liền với khâu thứ i, so với hệ tọa độ cố định: Ti = A1A2…Ai, i = 1 n
Trong trường hợp i = n, với n là số hiệu chỉ hệ tọa độ gắn liền với điểm tác động cuối (End-Effector) thì ta có:
Tn = A1A2…An cũng chính là ma trận trạng thái cuối TE: TE = Tn
Vị trí và hướng của khâu chấp hành cuối được cho bởi ma trận:
-Nhân 3 ma trận đầu với nhau ta được
Nhân 3 ma trận còn lại ta được
Ta có phương trình cần bằng như sau
SVTH: PHẠM NGUYỄN HOÀNG KỲ
Như vậy thi biết được giá trị của θi là góc giữa 2 đường vuông góc nói trên i ta hoàn toàn có thể xác định được hướng và vị trí của khâu chấp hành cuối bằng cách thay các giá trị này vào 12 phương trình trên
PHƯƠNG TRÌNH ĐỘNG HỌC NGƯỢC
Phương trình động học ngược - Vị trí (Position)
Trên hình vẽ là hình chiếu bằng của cánh tay robot trong 2 trường hợp của góc θi là góc giữa 2 đường vuông góc nói trên.1.
- Góc θi là góc giữa 2 đường vuông góc nói trên 1 được tính từ Py và Px: θi là góc giữa 2 đường vuông góc nói trên 1 = arctan2(Py, Px);
Theo hình vẽ, θi là góc giữa 2 đường vuông góc nói trên 1 có 2 nghiệm là θi là góc giữa 2 đường vuông góc nói trên 1 và (θi là góc giữa 2 đường vuông góc nói trên 1 + 180 o ), cũng đều thỏa mãn nghiệm của phương trình (2.8) Trường hợp Px = Py = 0, phương trình (2.8) sẽ có vô số nghiệm, do vậy hàm atan2 sẽ chọn nghiệm của θi là góc giữa 2 đường vuông góc nói trên 1 = 0.
Góc θθ 3 θđược θtính θdựa θvào θhình
SVTH: PHẠM NGUYỄN HOÀNG KỲ
Sử dụng định lí hàm số cos, ta có
Góc θi là góc giữa 2 đường vuông góc nói trên 2 tính dựa vào góc ѱ và γ như trên hình
2)Phương trình động học ngược-Hướng
Hướng của khâu chấp hành cuối ( gắn dụng cụ) được giải khi đã biết được các góc vị trí
Ta có bao gồm các thành phần ma trân quay của là các giá trị cần xác định
Sau khi nhân vế nhải ta tìm ra được các giá trị b ij rồi đồng nhất với các phần tử ta tim được các nghiệm của
SVTH: PHẠM NGUYỄN HOÀNG KỲ
ĐIỀU KHIỂN ROBOT
Sử dụng chương trình RT ToolBox2 để điều khiển robot
Sử dụng phần mền tạo trường trình hỗ trợ toàn diện “RT ToolBox2” để phát triển chương trình giàng cho robot cong nghiệp MELFA của MITSUBISHI.
RT ToolBox2 là phần mền dành cho máy tính cá nhân và hỗ trợ các giai đoạn gồn thiết lập, gỡ lỗi, và vận hành hệ thống Phần mền cho phép bạn tạo và chỉnh sửa chường trình, kiểm tra vùng vận hành trước khi sủ dụng robot, ước tính nhịp thời gian, thực hiện vận hành và gỡ lổi khi kích hoạt robot, và giám sát tình trạng và lỗi khi vận hành.
SVTH: PHẠM NGUYỄN HOÀNG KỲ
SVTH: PHẠM NGUYỄN HOÀNG KỲ
Vận hành robot bằng điều khiển giảng dạy
SVTH: PHẠM NGUYỄN HOÀNG KỲ
SVTH: PHẠM NGUYỄN HOÀNG KỲ
SVTH: PHẠM NGUYỄN HOÀNG KỲ