BỘ GIÁO DỤC VÀ ĐÀO TẠO TRƯỜNG ĐẠI HỌC KINH TẾ KỸ THUẬT BÌNH DƯƠNG KHOA KỸ THUẬT CÔNG NGHỆ o0o BÁO CÁO KẾT THÚC HỌC PHẦN NHẬP MÔN CƠ ĐIỆN TỬ Đề tài ROBOT DÒ LINE GV giảng dạy Th S Võ Văn Ân Sinh viên t.
TỔNG QUAN VỀ ROBOT DÒ LINE
Đặt vấn đề
Tự động hoá là sự kết hợp của nhiều lĩnh vực như cơ khí, điều khiển, công nghệ thông tin và cơ điện tử, tạo thành các hệ thống tự động hoá và quy trình sản xuất hoàn chỉnh Ngành công nghiệp tự động hoá ngày càng trở nên quan trọng và cần thiết trong việc thúc đẩy phát triển kinh tế, đặc biệt trong bối cảnh công nghiệp hoá hiện đại hoá hiện nay Để vận hành hiệu quả, lĩnh vực này đòi hỏi nguồn nhân lực có trình độ cao.
Robot ngày càng trở thành một phần thiết yếu trong cuộc sống hiện đại, đóng góp quan trọng vào các lĩnh vực lao động và tạo ra một cuộc cách mạng trong khoa học và kỹ thuật Chúng phục vụ hiệu quả cho nhiều ngành nghề, bao gồm khoa học quân sự, giáo dục, dịch vụ và giải trí.
Trong đồ án này, tôi thiết kế Robot dò line, một phần quan trọng trong việc phát triển Robot tự động tìm đường Dự án này không chỉ giúp tôi nắm vững kiến thức cơ bản mà còn tạo nền tảng vững chắc cho các dự án lớn hơn, hữu ích hơn trong quá trình học tập và làm việc sau này.
Đối tượng và phạm vi nghiên cứu
Mô hình xe dò line
Chạy mô hình ổn định quá trình cảm biến và điều khiển động cơ theo bản đồ có line đơn giản
Tìm hiểu nguyên lý hoạt động của một số linh kiện: L298N, Arduino R3, Cảm biến và một số linh kiện khác phục vụ cho đề tài
Vì thời gian và kiến thức có hạn, đồ án này sẽ tập trung vào nghiên cứu và thiết kế một chiếc xe đơn giản, đặc biệt chú trọng vào cơ sở hoạt động của bộ phận cảm biến và hệ thống điều chỉnh động cơ.
Phương pháp nghiên cứu
Đồ án này tập trung vào việc làm rõ vấn đề thông qua nghiên cứu sử dụng các phần mềm như Protues, lắp ráp mạch trên testboard, kết hợp với kinh nghiệm sẵn có và tìm kiếm tài liệu liên quan từ sách linh kiện điện tử.
Ý nghĩa khoa học và ứng dụng thực tiễn của đề tài
Đề tài "Thiết kế mạch cảm biến dò line cho robot/xe dò line" mặc dù có phạm vi hạn chế nhưng lại mang ý nghĩa quan trọng trong công nghệ chế tạo robot hiện đại Mạch cảm biến này đóng vai trò như "đôi mắt" của robot, giúp nhận diện và xác định đường đi một cách chính xác.
Trong thời đại hiện đại, ứng dụng công nghệ chế tạo Robot, đặc biệt là Robot dò đường, ngày càng trở nên phổ biến, nhất là trong các cuộc thi robocon Điều này không chỉ thúc đẩy sự sáng tạo vô tận của sinh viên mà còn giúp Robot hoạt động một cách ổn định.
CƠ SỞ LÝ THUYẾT
Giới thiệu Arduino UNO R3
2.1.1 Giới thiệu chung về Arduino
Arduino Uno là một bo mạch vi điều khiển do Arduino.cc phát triển, sử dụng vi điều khiển AVR Atmega328P Nền tảng điện tử mã nguồn mở này cho phép người dùng xây dựng các ứng dụng điện tử tương tác thông qua phần mềm và phần cứng hỗ trợ.
Trước khi Arduino ra đời, việc thực hiện các dự án điện tử nhỏ liên quan đến lập trình và biên dịch đòi hỏi sự hỗ trợ từ các thiết bị biên dịch khác.
Khi sử dụng vi điều khiển PIC hoặc IC vi điều khiển họ 8051, việc thiết kế chân nạp onboard là cần thiết, hoặc có thể lựa chọn mua các thiết bị hỗ trợ như mạch nạp 8051 và mạch nạp PIC để thuận tiện cho quá trình nạp và biên dịch.
Arduino đã trở nên phổ biến tại Việt Nam, thu hút sự quan tâm của học sinh, sinh viên và người đi làm Nhiều dự án nhỏ và lớn được thực hiện nhanh chóng, với mã nguồn mở được chia sẻ rộng rãi trên các diễn đàn trong và ngoài nước Điều này hỗ trợ đáng kể cho những ai đam mê nghiên cứu và chế tạo sản phẩm hữu ích cho xã hội.
Trong những năm gần đây, Arduino đã trở thành nền tảng chủ chốt cho hàng ngàn dự án điện tử đa dạng, từ những ứng dụng đơn giản trong đời sống hàng ngày đến các nghiên cứu khoa học phức tạp.
Thư viện mã nguồn mở ngày càng phát triển, hỗ trợ nhiều người mới tìm hiểu về Arduino cũng như các chuyên gia lập trình nhúng trong việc tham khảo và phát triển các dự án tiếp theo.
Nếu bạn muốn thiết kế các hệ thống điều khiển như cảm biến ánh sáng, đo nồng độ hóa chất, khí ga, hoặc xây dựng một robot mini, thì việc quản lý thiết bị điện trong nhà và điều khiển motor cũng là những lựa chọn thú vị Đối với những dự án phức tạp hơn như máy CNC, máy in 3D mini, hay máy bay không người lái (Flycam), bạn cần xây dựng một hệ thống thu thập dữ liệu qua GSM và xử lý ảnh Để thực hiện tất cả những ý tưởng này, bạn cần sử dụng ngôn ngữ lập trình Arduino, dựa trên sơ đồ và hệ thống thiết kế của bạn, thông qua phần mềm phù hợp.
Arduino IDE, để thực hiện những yêu cầu đó đưa về bộ phận xử lý trung tâm ( Arduino)
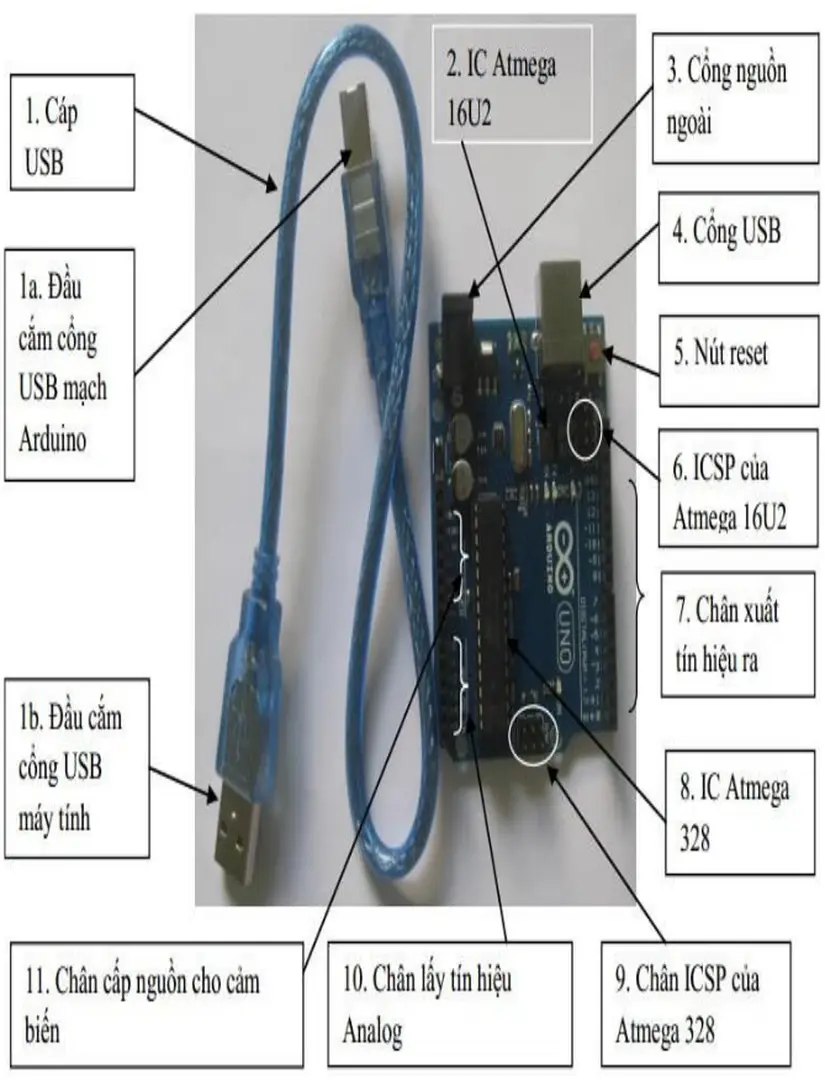
Hình 2.1 giới thiệu boar Arduino
Hình 2.2 hoạt động của chân Arduino
2.1.3 Thông số cơ bản của Arduino Uno R3
Vi điều khiển Atmega 328 (họ 8 bit) Điện áp hoạt động 5V – DC (cấp qua cổng USB)
Tần số hoạt động 16 MHz
Dòng tiêu thụ 30mA Điện áp vào khuyên dùng 7 – 12V – DC Điện áp vào giới hạn 6 – 20V – DC
Số chân Digital I/O 14 (6 chân PWM)
Số chân Analog 6 (độ phân giải 10 bit)
Dòng tối đa trên mỗi chân I/O 30 mA
Dòng ra tối đa (5V) 500 mA
Dòng ra tối đa (3.3V) 50 mA
Bộ nhớ flash 32 KB (Atmega328) với 0.5KB dùng bởi bootloader
Arduino R3 có hai chân Serial, 0 (RX) và 1 (TX), được sử dụng để gửi và nhận dữ liệu TTL Serial Nhờ vào hai chân này, Arduino Uno có khả năng giao tiếp với các thiết bị khác một cách hiệu quả.
2.1.5 Giao diện phần mềm Arduino
Cấu trúc một chương trình trong phần mềm IDE
Tổng quan quá trình xử lý chương trình Arduino
Phần 1: Khai báo biến Đây là phần khai báo kiểu biến, tên các biến, định nghĩa các chân trên board một số kiểu khai báo biến thông dụng: #define
Từ "define" có nghĩa là định nghĩa, và hàm #define được sử dụng để gán tên cho một chân hoặc ngõ ra cụ thể trong lập trình.
Chú ý: sau #define thì không có dấu “,” (dấy phẩy)
Khai báo các kiểu biến khác như: int (kiểu số nguyên), float,…
Phần này dùng để thiết lập cho chương trình, cần nhớ rõ cấu trúc của nó void setup()
Cấu trúc của nó có dấu ngoặc nhọn ở đầu và ở cuối, nếu thiếu phần này khi kiểm tra chương trình thì chương trình sẽ báo lỗi
Phần này dùng để thiết lập các tốc độ truyền dữ liệu, kiểu chân là chân ra hay chân vào Trong đó:
Serial.begin(9600); Dùng để truyền dữ liệu từ board Arduino lên máy tính pinMode(biến, kiểu và hoặc ra)
Dùng để xác định kiểu chân là đầu vào hay đầu ra
Dùng để viết các lệnh trong chương trình để mạch Arduino thực hiện các nhiệm vụ mà chúng ta mong muốn, thường bắt đầu bằng: void loop()
Giới thiệu L293D
Motor Shield L293 là một trong các module mở rộng dành cho Arduino Tương thích tốt với board ( Arduino Uno R3, Arduino Leonardo R3, Arduino Mega
Shield được trang bị 2 IC cầu H L293D và 1 IC logic 74HC595, cho phép điều khiển đa dạng các loại motor như servo, stepper và dc motor Nó hỗ trợ mức áp lên đến 36V và dòng tối đa 600mA cho mỗi kênh điều khiển.
2.2.1 Khả năng điều khiển trên Shield :
4 động cơ một chiều (M1, M2, M3, M4) độc lập thông qua 4 cầu H của L293D dòng 600mA (cực đại 1.2A) Hoặc 2 động cơ bước loại đơn cực (unipolar) hoặc lưỡng cực (bipolar)
Chống tự quay khi cấp nguồn (có sẵn các điện trở nối GND)
Có sẵn nút RESET để khởi động lại board Arduino
Arduino Motor Shield sử dụng 2 IC cầu H L293D hoàn chỉnh với các chế độ bảo vệ và 1 IC logic 74HC595 để điều khiển các động cơ
Arduino Motor Shield hỗ trợ điều khiển đa dạng các loại motor như step motor, servo motor và motor DC, với điện áp tối đa lên đến 36V và dòng tối đa 600mA cho mỗi kênh điều khiển.
Hình 2.4 Hoạt động các chân
2.2.3 Các chân trên Shield được kết nối với board Arduino như sau:
Servo Motor: 2 dây điều khiển 2 servo kết nối với chân số 9 và 10 Nguồn nuôi lấy trực tiếp từ board Arduino Động cơ một chiều (DC)
Motor 3 được kết nối với chân 5 và Motor 4 với chân 6 Động cơ bước sử dụng chân 4, 7, 8, 12 để điều khiển qua IC 74HC595 Trên shield có jumper màu vàng PWR, nếu kết nối nguồn ngoài cho board Arduino qua jack DC (ví dụ như pin 9V), nguồn nuôi motor sẽ được lấy từ jack này mà không cần nối với EXT_PWR Nếu ngắt jumper, bạn cần kết nối một nguồn riêng vào terminal EXT_PWR để cấp nguồn cho motor.
Cảm biến vật cản hồng ngoại
Cảm biến vật cản hồng ngoại hoạt động dựa trên một cặp phát và nhận tia hồng ngoại, có khả năng thích nghi với môi trường xung quanh Khi tia hồng ngoại phát ra gặp vật cản, nó sẽ phản xạ trở lại và được đèn thu nhận, từ đó đèn màu xanh sẽ sáng lên Đồng thời, cảm biến cung cấp tín hiệu số đầu ra ở mức thấp Khoảng cách làm việc hiệu quả của cảm biến này dao động từ 2 đến 5 cm, với điện áp hoạt động là 3.3 V.
15 đến 5V Độ nhạy sáng của cảm biến vật cản hồng ngoại được điều chỉnh bằng chiết áp, cảm biến dễ lắp ráp, dễ sử dụng,…
Có thể được sử dụng rộng rãi trong robot tránh chướng ngại vật, xe tránh chướng ngại vật và dò đường…
Bộ so sánh sử dụng LM393, làm việc ổn định
Điện áp làm việc: 3.3V – 5V DC
Khi bật nguồn, đèn báo nguồn màu đỏ sáng
Lỗ vít 3 mm, dễ dàng cố định, lắp đặt
Các mô-đun đã được so sánh điện áp ngưỡng thông qua chiết áp Khi sử dụng ở chế độ thông thường, người dùng không nên tự ý điều chỉnh chiết áp để đảm bảo hiệu suất và độ chính xác của thiết bị.
SƠ ĐỒ CẢM BIẾN VẬT CẢN HỒNG NGOẠI
Hình 2.5 công dụng cảm biến hồng ngoại
VCC: điện áp chuyển đổi từ 3.3V đến 5V (có thể được kết nối trực tiếp đến vi điều khiển 5V và 3.3V)
OUT: đầu ra kỹ thuật số (0 và 1)
Động cơ giảm tốc vàng kèm bánh xe
Động cơ giảm tốc vàng là lựa chọn phổ biến cho thiết kế Robot đơn giản nhờ vào chất lượng tốt và giá cả hợp lý Động cơ DC giảm tốc vàng dễ lắp ráp, giúp tiết kiệm chi phí và mang lại sự tiện lợi cho người sử dụng Khi mua động cơ này, bạn có thể chọn thêm gá bắt động cơ và bánh xe tương thích cho Robot của mình.
Điện áp hoạt động: 3 -9VDC
Dòng điện tiêu thụ: 110140mA
Bánh xe V1 được tối ưu hóa cho động cơ giảm tốc V1, trở thành lựa chọn phổ biến trong thiết kế robot nhờ vào giá thành hợp lý, chất lượng cao và dễ dàng lắp ráp Sự linh hoạt và ứng dụng đa dạng của bánh xe V1 làm cho nó trở thành một phần không thể thiếu trong nhiều dự án robot hiện nay.
Chất liệu: Nhựa, cao su, mút
THIẾT KẾ THI CÔNG
sơ đồ khối
Khối nguồn sử dụng điện áp 12V để cung cấp năng lượng cho khối khuếch đại hoạt động Để tạo ra mạch nguồn đơn giản cho các khối khuếch đại, ta sử dụng IC 7805 kết hợp với một tụ điện.
Điều khiển tắt mở nguồn
Chia nguồn thành nhiều mức nguồn khác nhau
Ổn định nguồn cung cấp cho các tải tiêu thụ
Khối cảm biến Khối chấp hành Khối xử lý trung tâm Khối Động Cơ
Khối cảm biến: sử dụng 4 quang trở nhận tín hiệu vạch dẫn đường và 4 led siêu sáng hiển thị cho cảm biến dò đường
Khối xử lý trung tâm: quan trọng nhất là L298N so sánh điện áp từ cầu chia điện thế, nhận tín hiệu từ khối cảm biến
Khối điều khiển nhận tín hiệu từ các ngõ ra của IC L298N và IC 7805, giúp điều khiển mức tín hiệu 0 và 1 để kích hoạt transistor Qua đó, khối chấp hành, bao gồm động cơ, được điều khiển một cách hiệu quả.
Khối động cơ: để tăng, giảm tốc độ
Cách bố trí cảm biến
Loại ánh sáng từ LED phát có ảnh hưởng trực tiếp đến khả năng cảm biến Trong mạch sử dụng quang trở, màu sắc của LED không quan trọng vì nó chỉ phụ thuộc vào cường độ ánh sáng Tuy nhiên, khi sử dụng LED hồng ngoại, hiệu suất sẽ phụ thuộc vào cường độ hồng ngoại Chúng ta sử dụng cảm biến hồng ngoại và quang trở để dò đường; khi cảm biến phát tín hiệu và nhận phản hồi, quang trở sẽ thay đổi điện trở, từ đó phát tín hiệu vào op-amp để xử lý và điều khiển động cơ.
Tính toán theo lý thuyết
Từ những thông số và linh kiện đã chọn ở trên, chúng ta có những thông số cần tính toán như:
Tính dung lượng tiêu thụ trung bình(lý thuyết):
Giả sử vị trí đặt thùng rác các điểm đổ rác 153m đoạn đường đi và về sẽ là 306m
Tổng thời gian đi về: t=s/v06/0,515Y4 giây = 10 phút
Số giờ sử dụng lượng pin 12v 6000/678=8,93 Giờ
Giả sử 1 ngày thùng rác đi về 2 lần
Số ngày sử dụng pin 12v là 8,93x3= 26 ngày
Sau 26 ngày ta cần sạc là 1 lần
Tính vận tốc xe (lý thuyết);
Sử dụng động cơ giảm tốc GA25 250 vòng/phút
Tốc độ không tải 250 vòng/phút
Tốc độ có tải 175 vòng/phút, dòng điện tiêu thụ 240
Ta cho động cơ chạy với 70% công suất tương đương 123 vòng/phút và dòng điện tiêu thụ 168Ma
Tổng cộng 4 động cơ: IDC 8*4 = 672
Đường kính bánh xe 8cm => chu vi bánh xe C= 3.14 * d=0,251 m
(động cơ quay 1 vòng thì thùng rác đi được 0,251m)
Trong 1 phút thùng rác đi được đoạn đường s3*0.2510,9 m
Vận tốc di chuyển của thùng rác v=s/t0,9/60=0,515 m/s
Lưu đồ robot dò line
Hình 3.1 Lưu đồ giải thuật
RẼ TRÁI 90 0 ĐỌC GIÁ TRỊ CẢM BIẾN
CẤP XUNG PMW CHO 4 BÁNH ĐỌC GIÁ TRỊ ENCODER
Thi công
Chương này trình bày quá trình thi công mô hình robot dò line, bao gồm lập trình, lắp ráp phần cứng và kiểm tra các module Ngoài ra, bài viết cũng cung cấp hình ảnh thực tế từ mô hình robot dò line cùng với các kết quả chạy mà mô hình đã đạt được cho đến thời điểm hiện tại.
- Chuẩn bị vật liệu: Thước, kéo, mica,khoan,ốc vít
2 Modul thu phát hồng ngoại IR
Hình 3.3 Cảm biến Hồng ngoại
2 bộ bánh xe gắn kèm motor
Hình 3.6 động cơ giảm tốc
- ban đầu đo đạc và khoan lỗ để gắn ốc vít và cố định 4 bánh xe vào phần đế
Hình 3.7 ảnh thực tế thiết kế khung xe robot dò line
Hoàn thiện sản phẩm
Hình 3.8 ảnh thực xe hoàn chỉnh