
Đang tải... (xem toàn văn)
Thông tin tài liệu
TRƯỜNG ĐẠI HỌC SƯ PHẠM KĨ THUẬT TP HCM KHOA ĐÀO TẠO CHẤT LƯỢNG CAO □□□□ MÔN HỌC KỸ THUẬT ROBOT BÁO CÁO CUỐI KÌ ROBOT SCARA 4 BẬC TỰ DO TỊNH TIẾN VÀ XOAY GV THỰC HIỆN HỌ VÀ TÊN MSSV Thành phố Hồ Chí Minh, Tháng 12, 2021 MỤC LỤC MỞ ĐẦU 3 1 1 Lý do chọn đề tài 3 1 2 Ý tưởng thiết kế 3 1 3 Khả năng áp dụng thực tiễn 4 1 4 Các hạn chế và mục tiêu nhóm cần đạt được 6 CHƯƠNG 2 THIẾT KẾ CƠ KHÍ ROBOT 8 CHƯƠNG 3 TÍNH TOÁN ĐỘNG HỌC 14 3 1 Động học thuận 14 3 2 Động học nghịch 15 3 3 Ma trận Jaco.
TRƯỜNG ĐẠI HỌC SƯ PHẠM KĨ THUẬT TP.HCM KHOA ĐÀO TẠO CHẤT LƯỢNG CAO -□□&□□ MÔN HỌC: KỸ THUẬT ROBOT BÁO CÁO CUỐI KÌ ROBOT SCARA BẬC TỰ DO TỊNH TIẾN VÀ XOAY GV: THỰC HIỆN: HỌ VÀ TÊN MSSV Thành phố Hồ Chí Minh, Tháng 12, 2021 MỤC LỤC MỞ ĐẦU 1.1 Lý chọn đề tài .3 1.2 Ý tưởng thiết kế 1.3 Khả áp dụng thực tiễn .4 1.4 Các hạn chế mục tiêu nhóm cần đạt .6 CHƯƠNG 2: THIẾT KẾ CƠ KHÍ ROBOT CHƯƠNG 3: TÍNH TỐN ĐỘNG HỌC 14 3.1 Động học thuận 14 3.2 Động học nghịch 15 3.3 Ma trận Jacobi 16 3.4 Không gian hoạt động robot 17 CHƯƠNG 4: TÍNH TỐN ĐỘNG LỰC HỌC 19 4.1 Phương trình động lực học .19 4.1.1 Mục đích phương pháp nghiên cứu động lực học .19 4.1.2 Cơ sở lý thuyết phương trình động lực học Lagrange – Euler 19 4.1.3 Tiến hành tính tốn động lực học cho Robot 20 4.1.3.1 Các thông số Robot: 20 4.1.3.2 Động khâu tay máy 22 4.2 Tính tốn khí - chọn động 24 4.2.1 Tính tốn khí .24 4.2.2 Động 29 4.2.2.1 Chọn động cho tay 29 4.2.2.2 Chọn động Khoan .31 CHƯƠNG 5: MƠ HÌNH HĨA VÀ MƠ PHỎNG 34 5.1 Giới thiệu Matlab Simulink giao diện GUI 34 5.2 Mô 36 KẾT LUẬN 39 TÀI LIỆU KHAM KHẢO .40 MỞ ĐẦU 1.1 Lý chọn đề tài Sự phát triển mạnh mẽ, vượt bậc công nghệ kỹ thuật mang tới nhiều lợi ích cho sống người Trong số ứng dụng mà kỹ thuật, công nghệ tạo để phục vụ cho đời sống cơng việc thiết bị điện tử, máy móc Trong đó, phát triển mặt tự động hóa đánh dấu mở đầu cho kỷ nguyên robot công nghiệp Một cánh tay robot công nghiệp không làm tăng tốc độ trình sản xuất mà độ xác cịn tăng lên đáng kể Những cánh tay robot hoạt động trơn tru giúp cắt giảm gần tối đa lỗi trình sản xuất người công nhân gây giúp giảm nhiều chi phí lao động Nhóm định chọn báo cáo đề tài cánh tay robot bao gồm bậc tự gồm khớp xoay khớp tịnh tiến, nhằm tìm hiểu nắm cốt lõi phần thiết kế khí, tốn động học áp dụng phần tính tốn vào mơ Matlab Hình Phát triển tự động hóa đánh dấu mở đầu cho kỷ nguyên robot cơng nghiệp 1.2 Ý tưởng thiết kế Tính tốn thiết kế cánh tay Robot kiểu SCARA bậc tự gồm khớp xoay khớp tịnh tiến, di chuyển khoan đồ vật vị trí xung quanh quỹ đạo quay robot Ngoài Robot di chuyển tịnh tiến lên xuống theo đường thẳng thơng qua cấu vít me Thiết kế đảm bảo yêu cầu sau đây: - Yêu cầu linh hoạt: Là thành phần thiếu sản xuất linh hoạt, đặc biệt dây chuyền lắp ráp lớn, Cánh tay robot đòi hỏi thao tác lặp lặp lại liên tục - Yêu cầu độ xác cao: Việc Robot tham gia vào công đoạn phức tạp thay người giúp tăng đáng kể độ xác, từ tăng chất lượng sản phẩm, hạn chế sản phẩm lỗi - u cầu độ an tồn: Robot cơng nghiệp, cánh tay Robot công nghiệp hoạt động tốt môi trường gây hại cho người như: Nhiệt độ cao, hóa chất độc hại, hầm mỏ; sử dụng Robot cơng nghiệp giải pháp tăng tính an tồn sản xuất - u cầu khơng vi phạm quy luật thiết kế Robot Asimov Hình Mơ hình cánh tay Robot SCARA 1.3 Khả áp dụng thực tiễn Cánh tay Robot áp dụng vào nhiều lĩnh vực khác như: - Ứng dụng vào dây chuyền lắp ráp: Tất sở - nhà máy sản xuất có phận chuyên đảm nhiệm lắp ráp chi tiết hay linh kiện vào để tạo thành phẩm cuối Công việc chủ yếu công nhân phận truyền động vít hay vặn đai ốc Tuy quy trình thực khơng lại mang đặc tính thay đổi thường xun thơng số kỹ thuật sản xuất Thông thường, với sản phẩm công nghiệp, nhà sản xuất thường chế tạo nhiều kích cỡ theo nhu cầu đa dạng thị trường cung ứng Điều dẫn đến việc phải điều chỉnh máy móc hỗ trợ nhiều lần, gây thời gian Từ ứng dụng robot công nghiệp vào rào cản khơng cịn đáng kể Hình Ứng dụng cánh tay Robot dây chuyền lắp ráp - Ứng dụng vào nhiệm vụ phân loại, đóng gói bốc xếp hàng hóa: Sau khỏi dây chuyền sản xuất, sản phẩm chuyển đến kho, sản phẩm tiến hành đóng gói xếp lên pallet để giao hàng Tùy vào đặc tính sản phẩm, to hay nhỏ, nặng hay nhẹ, vỡ hay khơng mà hai nhiệm vụ có yêu cầu kèm theo Nhưng nhìn chung, nhiệm vụ đóng gói bốc xếp hàng lên xuống pallet có điểm đặc thù lặp lặp lại Do đó, để người thực điều khơng gây nhàm chán mà cịn khơng tận dụng sức lao động người nhiệm vụ đòi hỏi yêu cầu cao Đây động lực để nhà sản xuất công nghiệp cân nhắc đến việc ứng dụng robot cơng nghiệp vào nhiệm vụ Hình Ứng dụng cánh tay Robot dây chuyền hàng hóa - Ứng dụng vào nhiệm vụ kiểm tra chất lượng sản phẩm: Mỗi loại sản phẩm có yêu cầu tiêu chuẩn đầu riêng, nhiệm vụ kiểm tra chất lượng phải đảm bảo sản phẩm đạt tất yêu cầu Hơn nữa, loạt sản xuất, không mà số lượng lớn sản phẩm đầu ra, lúc tính đồng nhiều sản phẩm riêng lẻ khiến khơng doanh nghiệp quan tâm Sự ứng dụng cánh tay robot công nghiệp thực giúp ích điều Hình Ứng dụng cánh tay Robot kiểm tra chất lượng sản phẩm 1.4 Các hạn chế mục tiêu nhóm cần đạt Trong thời kỳ dịch bệnh Covid 19 diễn biến nặng, phải thay phương pháp học trường phương pháp học mang tính online nên tính tốn mang tính lý thuyết, mơ phác họa mơ hình, chưa làm sản phẩm thực tế Trước điều đó, nhóm em đưa mục tiêu sau: Nhóm tìm hiểu vị trí tầm quan trọng Robot cơng nghiệp dây chuyền tự động hóa q trình sản xuất Thiết kế thành công thành phần khí tính tốn xác tốn động học phân tích chuyển động cánh tay Robot Mơ tính tốn phần mềm Matlab Hoàn thành báo cáo tiến hành báo cáo hạn CHƯƠNG 2: THIẾT KẾ CƠ KHÍ ROBOT - Chi tiết 1: Phần đế khớp tịnh tiến: Phần đế chứa động trục vít có chức biến chuyển động quay động thành chuyển động tịnh tiến thơng qua trục vít phần đỡ cánh tay robot Các thông số cần thiết khớp 1: - Chi tiết 2: Phần khớp chứa động cơ, động truyền chuyển động đến khớp xoay thứ thông qua truyền đai Các thông số cần thiết chi tiết 2: Hình Nhập thơng số vào cơng cụ tính tốn pulley Ta thơng số sau: Hình Các thơng số pulley sau q trình tính tốn cơng cụ Ngồi ra, cơng cụ cịn hiển thị cho ta thấy vật liệu thích hợp dây đai Hình Tính tốn dây đai cơng cụ sau nhập thơng số Tính tốn Pulley số 2: Ta có khoảng cách d = 95 mm a có tỉ số tốc độ: Với tỉ số tốc độ =4 ta có Kr=0,4 Hình Hệ số hiệu chỉnh tỷ lệ tốc độ Ta có hệ số tải: Tương tự pulley 1, ta dùng cơng cụ để tính tốn tìm pully đai thích hợp xác Ta thơng số sau: Hình Các thơng số pulley sau q trình tính tốn cơng cụ Ngồi ra, cơng cụ cịn hiển thị cho ta thấy vật liệu thích hợp dây đai Hình Tính tốn dây đai cơng cụ sau nhập thông số 2.2 Động .2.2.1 Chọn động cho tay - Ta có khối lương đầu vào m = 7kg - Hệ số ma sát = 0,1 - Ta có tốc độ quay dự tính N=0.31 vịng/ giây Suy ta có 19 vịng/phút - Tốc độ góc - Vận tốc dài - Ta có lực cần thiết để dịch chuyển cánh tay - Momen cần thiết khâu để dịch chuyển khâu - Công suất cần thiết khâu 2: - Công suất cần thiết động cơ: - Ta chọn cơng suất động cần thiết 8W Tính tốn ta dựa thơng số: - Dịng định mức 3A - Điện áp đầu vào 24V => Công suất động tối đa Pmax=U.I=24.3=72W Fms=μ.N=0,1.mg=0,1.7.9,8=6,86N - Công suất làm việc: Nhóm định chọn động Dual Shaft Nema 24HS39-3008D để áp dụng vào cấu robot: Hình Động bước Dual Shaft NEMA 24HS39-3008D Thông số kỹ thuật: Loại động cơ: Đơn cực / lưỡng cực Bước góc: 1,8 độ Mơ-men xoắn giữ (Lưỡng cực): 4.0Nm (566oz.in) Mơ-men xoắn giữ (Đơn cực): 2,8Nm (397oz.in) Dịng định mức (Bipolar Serial): 2.12A Dòng định mức (Song song lưỡng cực): 4,24A Dòng định mức (đơn cực): 3.0A Kháng pha (Nối tiếp lưỡng cực): 2,8ohms Kháng pha (Song song lưỡng cực): 0,7ohms Kháng pha (Đơn cực): 1.4ohms Điện cảm (Nối tiếp lưỡng cực): 12.0mH ± 20% (1KHz) Điện cảm (Song song lưỡng cực): 3.0mH ± 20% (1KHz) Điện cảm (Đơn cực): 3.0mH ± 20% (1KHz) .2.2.2 Chọn động Khoan Nhóm chọn động khoan 775 12-24VDC trục D có thơng số kỹ thuật sau: - Điện áp sử dụng: 12- 24V (sử dụng nguồn 12v 10A yêu cầu độ bền cao) - Tốc độ: 7600 Vòng/ phút (12V); 12000 Vịng/ phút (24V) - Trục: Đường kính 5mm vát Bán Nguyệt chống trượt - Đường kính động cơ: 4.2 cm - Chiều dài động cơ: 7.7 cm - Chiều dài trục động cơ: 10 cm - Trọng lượng: 346G - Thông số kĩ thuật đầu kẹp mũi khoan chấu Bried 0.6 - 6.5 mm Động khoan 775 12-24VDC trục D Vì động cơ, ta phải cần thêm chi tiết để biến động thành khoan sau: - Đầu nối trục B10-5mm Hình Chi tiết đầu nối trục - Đầu kẹp mũi khoan chấu Bried 0.6 - 6.5 mm Hình Chi tiết đầu kẹp mũi khoan chấu CHƯƠNG 5: MƠ HÌNH HĨA VÀ MƠ PHỎNG Giới thiệu Matlab Simulink giao diện GUI Simulink công cụ Matlab dùng để mơ hình, mơ phân tích hệ thống động với môi trường giao diện sử dụng đồ họa Việc xây dựng mơ hình đơn giản hóa hoạt động nhập chuột kéo thả Simulink bao gồm thư viện khối với hộp cơng cụ tồn diện cho việc phân tích tuyến tính phi tuyến Simulink phần quan trọng Matlab dễ dàng chuyển đổi qua lại q trình phân tích, mà người dùng tận dụng ưu hai mơi trường GUI giao diện hình ảnh chương trình Nó bao gồm nút nhấn, hộp liệt kê, trượt, menu… Chúng cung cấp cho người dùng sử dụng môi trường làm việc than thiện để họ tập trung vào ứng dụng chương trình tìm hiểu cách thức làm việc chương trình Đây giao diện ta mở ‘guide’ Khi lưu giao diện vừa tạo, Matlab tạo file có tên khác phần mở rộng: - File có phần mở rộng fig chứa nội dung giao diện - File có phần mở rộng m chứa đoạn mã code liên quan đến giao diện Khi thiết kế thành phần Guide ta cần thiết lập thuộc tính cho thành hần Để thiết lập thuộc tính ta chọn mục “Property Inspector” công cụ right-click vào đối tượng chọn mục “Inspector Properties” Hai thuộc tính quan trọng mà ta cần xác lập “String Property” “Tag Property” - String property: dòng ký tự xuất đối tượng - Tag property: tên đối tượng Khi click chuột vào đối tượng, Matlab gọi hàm tương ứng với đối tượng Tên hàm tên đối tượng cộng với “_Callback” Các hàm thường sử dụng Guide: Set: Thay đổi giá trị thuộc tính đối tượng giao diện set(handles.TextBox, ‘String’,str) Get: Truy xuất giá trị thuộc tính đối tượng giao diện get(handles.EditBox, ‘String’) Ngồi cịn có hàm axes, guide, num2str(), str2num()… Mô Ta xuất mô hình robot sang Matlab sơ đồ khối hình: Ta bắt đầu thiết kế giao diện Guide: Giao diện gồm có cửa sổ, cửa sổ để giới thiệu, cửa sổ thứ hai để chạy chương trình mô động học thuận nghịch robot Giao diện robot hoạt động thu được: KẾT LUẬN Thông qua trình tìm hiểu, nhóm em khơng thể phủ nhận tầm quan trọng Robot việc đánh dấu cải cách tồn diện cơng tự động hóa vượt bậc q trình sản xuất người Ngồi nhóm cịn nắm kiến thức việc lên ý tưởng thiết kế khí cánh tay Robot, cách vận hành đơn giản áp dụng triệt để vào thực tiễn Cũng có kỹ cần thiết việc tính tốn động lực học từ đưa sở tính chọn thành phần truyền động khí cánh tay, từ chọn loại động cơ, loại pulley phù hợp xác Việc tính tốn toán động học thuận, động thuận nghịch việc tối quan trọng việc thiết kế cánh tay Robot, từ ta tìm vận tốc không gian hoạt đông Robot bao qt tồn q trình vận hành Robot TÀI LIỆU KHAM KHẢO Chiasemoi.com-bai-tap-lon-tinh-toan-va-thiet-ke-robot-scara.pdf - Google Drive Robot Scara (asmtechg.com) overload coefficient (misumi-ec.com) Kỹ thuật robot - Chương 5: Động lực học robot ứng dụng thực tiễn - TaiLieu.VN CHƯƠNG IV ĐỘNG LỰC HỌC ROBOT - Tài liệu text (123docz.net) Điều khiển robot matlab - YouTube Đồ án thiết kế hệ thống khí - Robot SCARA bậc tự | PDF (scribd.com) Robot Scara Bậc.doc pdf Tải xuống miễn phí! (timvanban.vn) Robot Scara gì? Ứng dụng robot scara vào sản xuất công nghiệp (maysanxuattudong.com) TẦM QUAN TRỌNG CỦA VIỆC LẮP ĐẶT ROBOT CÔNG NGHIỆP (fumee.vn) ROBO331129_21_1_02CLC: Chap Actuator (hcmute.edu.vn) ROBO331129_21_1_02CLC: Chap Motions and Velocities (hcmute.edu.vn) ROBO331129_21_1_02CLC: Kinematic problem (hcmute.edu.vn) ROBO331129_21_1_02CLC: DH Table (hcmute.edu.vn) ... thống khí - Robot SCARA bậc tự | PDF (scribd.com) Robot Scara Bậc. doc pdf Tải xuống miễn phí! (timvanban.vn) Robot Scara gì? Ứng dụng robot scara vào sản xuất công nghiệp (maysanxuattudong.com)... – Euler 19 4. 1.3 Tiến hành tính tốn động lực học cho Robot 20 4. 1.3.1 Các thông số Robot: 20 4. 1.3.2 Động khâu tay máy 22 4. 2 Tính tốn khí - chọn động 24 4.2.1 Tính tốn... chọn báo cáo đề tài cánh tay robot bao gồm bậc tự gồm khớp xoay khớp tịnh tiến, nhằm tìm hiểu nắm cốt lõi phần thiết kế khí, tốn động học áp dụng phần tính tốn vào mơ Matlab Hình Phát triển tựNgày đăng: 07/06/2022, 00:37
Xem thêm:
Hình ảnh liên quan

nh..
Phát triển tự động hóa đánh dấu sự mở đầu cho một kỷ nguyên robot công nghiệp Xem tại trang 4 của tài liệu.
nh..
Mô hình cánh tay Robot SCARA Xem tại trang 5 của tài liệu.
nh..
Ứng dụng cánh tay Robot trong các dây chuyền lắp ráp Xem tại trang 6 của tài liệu.
nh..
Ứng dụng cánh tay Robot trong kiểm tra chất lượng sản phẩm Xem tại trang 7 của tài liệu.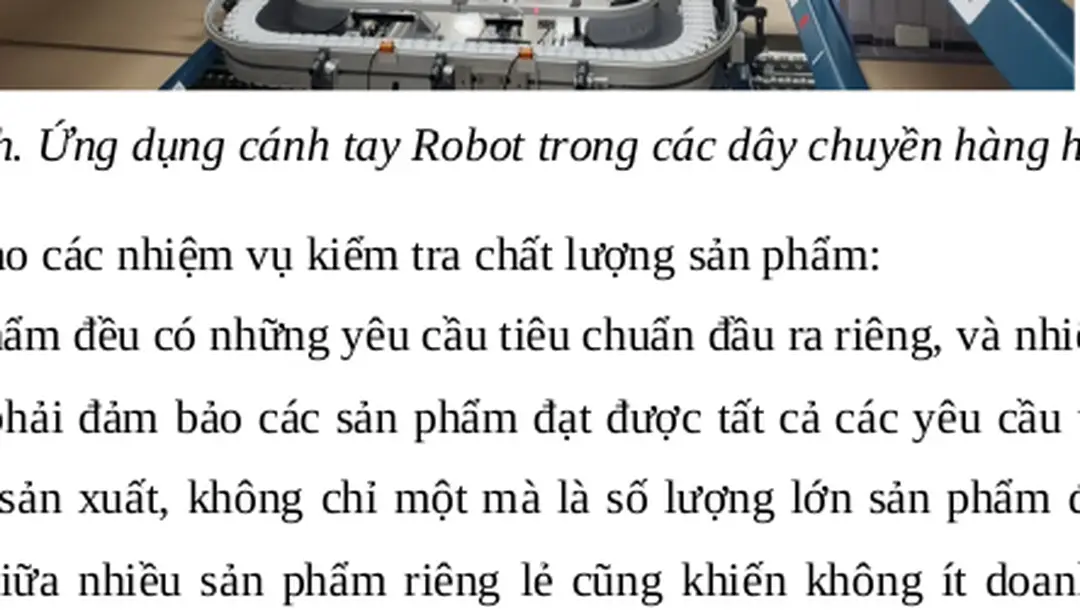
nh..
Ứng dụng cánh tay Robot trong các dây chuyền hàng hóa Xem tại trang 7 của tài liệu.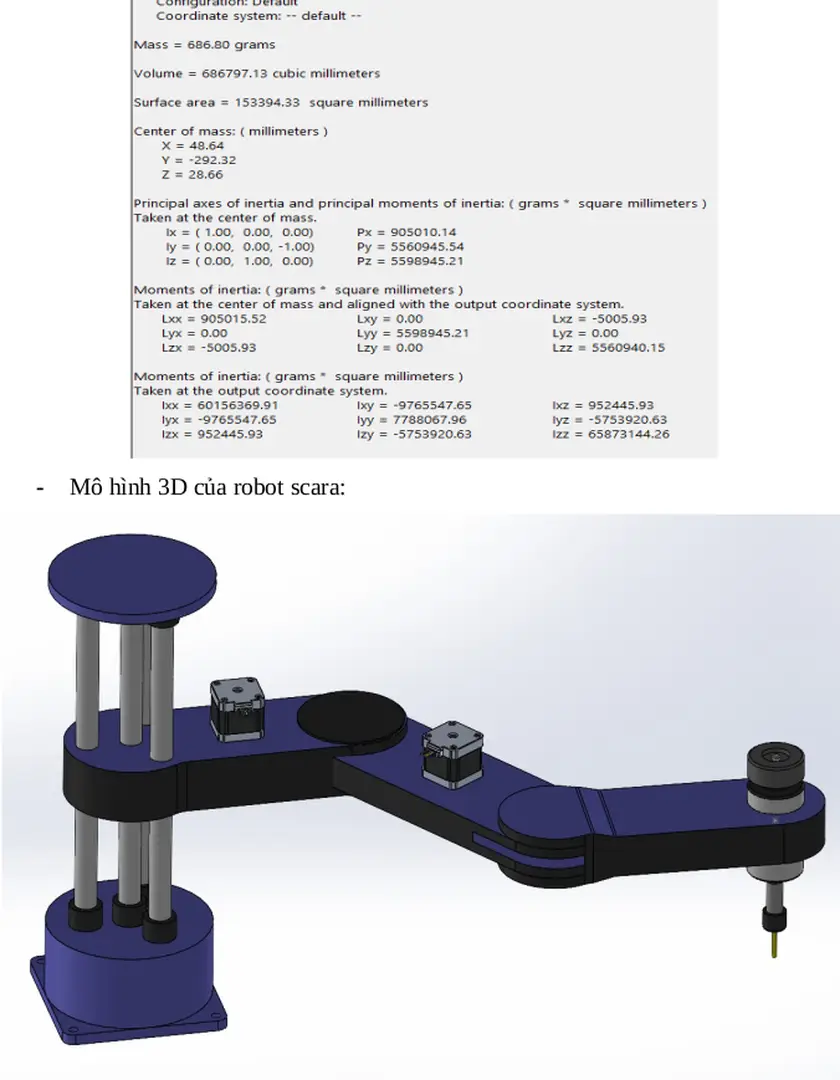
h.
ình 3D của robot scara: Xem tại trang 13 của tài liệu.
h.
ình 3D của robot scara: Xem tại trang 13 của tài liệu.
ng.
DH: Xem tại trang 15 của tài liệu.
t.
quả thu được không gian hoạt động của robot như hình vẽ : Xem tại trang 17 của tài liệu.
nh..
Hệ số hiệu chỉnh idlers Xem tại trang 25 của tài liệu.
nh..
Hệ số hiệu chỉnh tải Xem tại trang 26 của tài liệu.
nh..
Nhập thông số vào công cụ tính toán pulley Xem tại trang 27 của tài liệu.
nh..
Các thông số của pulley sau quá trình tính toán của công cụ Xem tại trang 27 của tài liệu.
nh..
Các thông số của pulley sau quá trình tính toán của công cụ Xem tại trang 29 của tài liệu.
nh..
Động cơ bước Dual Shaft NEMA 24HS39-3008D Xem tại trang 31 của tài liệu.
nh..
Chi tiết đầu nối trục Xem tại trang 33 của tài liệu.
nh..
Chi tiết đầu kẹp mũi khoan 3 chấu Xem tại trang 33 của tài liệu.
5.
MÔ HÌNH HÓA VÀ MÔ PHỎNG .1. Giới thiệu về Matlab Simulink và giao diện GUI Xem tại trang 34 của tài liệu.
a.
xuất mô hình robot sang Matlab sẽ được sơ đồ khối như hình: Xem tại trang 36 của tài liệu.Từ khóa liên quan
Mục lục
CHƯƠNG 2: THIẾT KẾ CƠ KHÍ ROBOT
.4. Không gian hoạt động robot
.1.3. Tiến hành tính toán động lực học cho Robot.
.1.3.1. Các thông số của Robot:
CHƯƠNG 5: MÔ HÌNH HÓA VÀ MÔ PHỎNG
.1. Giới thiệu về Matlab Simulink và giao diện GUI
TÀI LIỆU KHAM KHẢO
Tài liệu cùng người dùng
Tài liệu liên quan