GIÁO TRÌNH LÝ THUYẾT ĐIỀU KHIỂN LOGIC phần 1

GIÁO TRÌNH LÝ THUYẾT ĐIỀU KHIỂN LOGIC . phần 1
... 0 - 511 9 0 - 10 239 IB 0 - 15 0 - 15 0 - 15 0 - 15 QB 0 - 15 0 - 15 0 - 15 0 - 15 MB 0 - 31 0 - 31 0 - 31 0 - 31 SMB 0 - 17 9 0 - 299 0 -549 0 - 549 SB 0 - 31 0 - 31 0- 31 0 - 31 LB ... 5.7 0.0 - 15 .7 0.0 - 31. 7 0.0 - 31. 7 0.0 - 31. 7 SM 0.0 - 1. 7 0.0 - 45.7 0.0 - 94.7 0.0 - 19 4.7 0.0 - 19 4.7 T 0 - 63 0 - 12 7 0 - 255 0 - 255 GIÁO TRÌNH L...
Ngày tải lên: 28/10/2013, 09:15

Giáo trình lý thuyết điều khiển logic
... GIÁO TRÌNH LÝ THUYẾT ĐIỀU KHIỂN LOGIC ThS. Nguyễn Bá Hội Đại học Đà Nẵng - Trường Đại học Bách khoa hoinb@ud.edu.vn Giáo trình đầy đủ bao gồm 3 phần: 1. Giáo trình lý ... bộ L 50 9 .1. 8 Vùng các bộ định thời T 50 9 .1. 9 Vùng các bộ đếm C 51 9 .1. 10 Vùng các đầu vào tương tự AI 51 9 .1. 11 Vùng các đầu ra tương tự AQ 51 9 .1. 12 Các accumulator...
Ngày tải lên: 23/10/2012, 08:12
Giáo trình lý thuyết điều khiển tự động 1
... )( )() (1 )( )( )() (1 1 )( 21 2 21 sD sGsG sG sR sGsG sE + − + = trong đó: )() (1 1 21 sGsG+ coi là hàm truyền quan hệ giữa E(s) và R(s) 11 5 Giáo trình Lý thuyết điều khiển tự động 1 )() (1 )( 21 2 sGsG sG + coi ... ==∞=∞ v ramp K ee (6.53) - r(t) =1/ 2 t 2 u(t) → R(s) = 1/ s 3 3 10 14 .1 875 11 )()( − ×===∞=∞ a parabola K ee (6.54) 11 2 Giáo...
Ngày tải lên: 13/08/2013, 09:21

GIÁO TRÌNH BÀI TẬP ĐIỀU KHIỂN LOGIC. phan 1
... Yêu cầu GF1 RF1 R2 Y2 G2 G1 Y1 R1 RF2 GF2 R2 Y2 G2 R2 Y2 G2 RF1 GF1 RF1 GF1 TRAFFIC LIGHT SYSTEM Pedestrian button On Flash On Automatic Off R1 G1 RF2 GF2 Y1 Y1R1G1 RF2 GF2 Điều khiển đèn ... hoinb@ud.edu.vn Giáo trình đầy đủ bao gồm 3 phần: 1. Giáo trình lý thuyết 2. Giáo trình tập lệnh 3. Giáo trình bài tập Giáo trình bài tập S7-200 có kèm theo:...
Ngày tải lên: 28/10/2013, 09:15

Giáo trình lý thuyết điều khiển tự động
... )( )() (1 )( )( )() (1 1 )( 21 2 21 sD sGsG sG sR sGsG sE + − + = trong đó: )() (1 1 21 sGsG+ coi là hàm truyền quan hệ giữa E(s) và R(s) 11 5 Giáo trình Lý thuyết điều khiển tự động 1 )() (1 )( 21 2 sGsG sG + coi ... ==∞=∞ v ramp K ee (6.53) - r(t) =1/ 2 t 2 u(t) → R(s) = 1/ s 3 3 10 14 .1 875 11 )()( − ×===∞=∞ a parabola K ee (6.54) 11 2 Giáo...
Ngày tải lên: 13/08/2013, 09:22

GIÁO TRÌNH môn học điều KHIỂN LOGIC
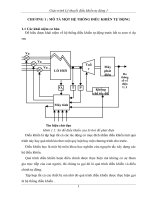
... chấp hành L 1 L 2 S L 1 L 2 S Lò L 1 Lò L 2 Cửa sổ Lò L 1 Lò L 2 Cửa sổ A B C L 1 L 2 S 0 0 0 1 1 1 0 0 1 1 0 0 0 1 0 x x x 0 1 1 x x x 1 0 0 1 0 1 Hình 0 .1: Mô tả hoạt ... tràn SM1 .1. Sau khi lệnh thực hiện, bit SM1 .1 sẽ có giá trị logic của bit thứ N - 8, N – 16 , N – 32, trong đó N là số đếm lần quay. 6. Bit báo kết quả 0 (bit SM...
Ngày tải lên: 13/08/2013, 09:22

giáo trình lí thuyết điều khiển tuyến tính ( Nguyễn Doãn Phước )
... y e Hình 1. 12: Điều khiển phản hồi đầu ra. a) uw y b) Đối tợng điều khiển Bộ điều khiển Đối tợng điều khiển Bộ điều khiển uw y x Hình 1. 13: Điều khiển phản hồi đầu ra theo nguyên lý ... l đo đợc x uw y e uw y x Hình 1. 11: Điều khiển phản hồi trạng thái a) b) Đối tợng điều khiển Bộ điều khiển Đối tợng điều khiển Bộ điề...
Ngày tải lên: 13/03/2014, 20:47


Giới thiệu lý thuyết điều khiển tự động (1)
... vật: bionics), điều khiển học kinh tế. 2. Lý thuyết điều khiển tự động: Là cơ sở lý thuyết của điều khiển học kỹ thuật. Điều khiển tự động là thuật ngữ chỉ quá trình điều khiển một đối tượng ... với quá trình điều khiển bằng tay (manual). 3. Hệ thống điều khiển tự động: Một hệ thống điều khiển tự động bao gồm 3 phần chủ yếu: Thiết bò điều...
Ngày tải lên: 02/10/2013, 05:20

Tài liệu Giáo trình lý thuyết và bài tập Pascal_Chương 1 pdf
... Readln End. ********* 010 8********* Program Tam_giac_Pascal; Begin Writeln(' 1& apos;); Writeln(' 1 1'); Writeln(' 1 2 1& apos;); Writeln(' 1 3 3 1& apos;); Writeln(&apos ;1 4 6 4 1& apos;); ... hai = '); Readln(so2); tong := so1 + so2; hieu := so1 - so2; tich := so1 * so2; thuong := so1 / so2; Writeln('*Tong cua hai so ',so1,&apo...
Ngày tải lên: 24/12/2013, 11:15