giáo trình lý thuyết điều khiển tự động 1
Giáo trình lý thuyết điều khiển tự động 1
... thiết kế Giáo trình Lý thuyết điều khiển tự động Câu hỏi ôn tập chương 1 Hệ thống điều khiển tự động phân loại nào? Hệ thống điều khiển có phần tử bản? Hãy nêu quy tắc điều khiển cở để điều khiển ... K + ( s + p1 ) K + L + ( s + p1 ) r 1 K r + + ( s + p1 ) r K n ( s + p1 ) r K r +1 +L+ (s + p ) (s + p n ) 15 (2 .13 ) Giáo trình Lý thuyết điều khiển tự động Ta tìm K1 cho s → - p1 Để tìm K2 ... Giáo trình Lý thuyết điều khiển tự động Tập hợp tất thiết bị kỹ thuật, đảm bảo ĐK ĐC tự động trình gọi hệ thống ĐK ĐC tự động (đôi gọi tắt hệ thống tự động – HTTĐ) 1. 2 Các phần tử hệ thống điều...
Ngày tải lên: 13/08/2013, 09:21

Giáo trình lý thuyết điều khiển tự động
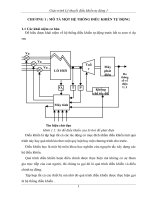
... thiết kế Giáo trình Lý thuyết điều khiển tự động Câu hỏi ôn tập chương 1 Hệ thống điều khiển tự động phân loại nào? Hệ thống điều khiển có phần tử bản? Hãy nêu quy tắc điều khiển cở để điều khiển ... Giáo trình Lý thuyết điều khiển tự động CHƯƠNG : MÔ TẢ MỘT HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG 1. 1 Các khái niệm Để hiểu khái niệm hệ thống điều khiển tự động trước hết ta xem ví ... K + ( s + p1 ) K + L + ( s + p1 ) r 1 K r + + ( s + p1 ) r K n ( s + p1 ) r K r +1 +L+ (s + p ) (s + p n ) 15 (2 .13 ) Giáo trình Lý thuyết điều khiển tự động Ta tìm K1 cho s → - p1 Để tìm K2...
Ngày tải lên: 13/08/2013, 09:22

Giáo trình lý thuyết điều khiển tự động
... truy n W 11 c a h kín ph n h i âm W1-H1 là: W1 W 11 = + W1 H Hàm truy n kín W (s ) c a h th ng hàm truy n c a kh i (W 11 n i ti p W2), ph n h i âm H2: W1 W2 W11W2 + W1 H W1W2 W (s) = = = W1 + W11W2 ... + α) n 22 10 (s + a )(s + b) (e −at − e −bt ) b−a t 11 t − − T1 T2 1 e T + e T T1 − T2 T1 − T2 s(T1s + 1) (T2 s + 1) 12 e − at e − bt + + ab a (a − b) b(b − a ) s(s + a )(s + b) 13 (1 − e −at ... (a0 s n + a1 s n 1 + + an 1 s + an )Y ( s ) = (b0 s m + b1 s m 1 + + bm 1 s + bm ) R ( s ) Y ( s ) b0 s m + b1 s m 1 + + bm 1 s + bm = W (s) = R( s ) a0 s n + a1 s n 1 + + an−1s + an Đa th...
Ngày tải lên: 03/07/2015, 16:25

giáo trình lý thuyết điều khiển tự động
... áp dụng từ lý thuyết điều khiển tự động Khái niệm điều khiển thật khái niệm rộng, nội dung sách đề cập đến lý thuyết điều khiển hệ thống kỹ thuật 1. 1.2 Các thành phần hệ thống điều khiển Chú thích ... tế, kỹ thuật phương pháp điều khiển tối ưu 1. 4 LỊCH SỬ PHÁT TRIỂN LÝ THUYẾT ĐIỀU KHIỂN 1. 4 .1 Điều khiển kinh điển (classical control) Lý thuyết điều khiển kinh điển (trước 19 60) mô tả hệ thống miền ... Mục 1. 5 trình bày chi tiết số phần tử hệ thống điều khiển thường gặp, qua làm bật vai trò phần tử hệ thống điều khiển 12 CHƯƠNG 1. 1.3 Các toán lónh vực điều khiển tự động Trong lónh vực điều khiển...
Ngày tải lên: 01/08/2015, 16:19


Giáo trình lý thuyết điều khiển tự động phần 1 phan xuân minh (chủ biên)
Ngày tải lên: 05/12/2015, 21:33

Giáo trình lý thuyết điều khiển tự động phần 2 phan xuân minh (chủ biên)
Ngày tải lên: 05/12/2015, 21:34

Lý thuyết điều khiển tự động hóa quá trình nhiệt
... s(0,8s 1) Xác định mô hình O 11( s) Từ đồ thị đặc tính van V1 ta xác định KV1 sau : 0 ,16 5 Ta có : K V1 tg 4, 28 .10 3 38,5 Từ ta có mô hình đối tượng O1(s) sau 0,05 O1 (s) K V1.O 11 (s) 4,28 .10 3 ... = 1, 203 K 1, 203. 0, 214 .10 3 0,982.s s. (1 0,8s) , ta có O (s) e PT (1) s (1 0,8s) 0, 214 .10 3 Thay vào với = 0,982 ph s. (1 0,8s) * R (s) 3,95 .10 3. (1 0,8s) , điều chỉnh bền vững 1, 203.0,982.s ... 0,982.s s (1 0,8s) 0, 214 .10 3 0,982.s O1 (s) e s (1 0,8s) Xác định KV1 Sinh viên : Đặng Hồng Chuyên Lớp : Máy & Thiết bị Nhiệt Lạnh 02 - K50 Bài tập lớn : Lý Thuyết điều khiển tự động hóa trình...
Ngày tải lên: 29/10/2012, 14:50

Lý thuyết điều khiển tự động.doc
... vật (phỏng sinh vật: bionics), điều khiển học kinh tế Lý thuyết điều khiển tự động: Là sở lý thuyết điều khiển học kỹ thuật Điều khiển tự động thuật ngữ trình điều khiển đối tượng kỹ thuật mà tham ... (automatic) ngược lại với trình điều khiển tay (manual) Hệ thống điều khiển tự động: Một hệ thống điều khiển tự động bao gồm phần chủ yếu: Thiết bò điều khiển (TBĐK) - Đối tượng điều khiển (ĐTĐK) - Thiết ... thiết bò điều khiển Tín hiệu hồi tiếp phối hợp với tín hiệu vào để tạo tín hiệu điều khiển Hình 1. 1 sơ đồ hệ thống kín Cơ sở lý thuyết để nghiên cứu hệ thống kín lý thuyết điều khiển tự động Hệ...
Ngày tải lên: 04/08/2012, 14:21


Báo Cáo Lý Thuyết Điều Khiển Tự Động sử dụng MatLab & Simulink
... -13 .3 713 -0.0643 + 5.9 812 i -0.0643 - 5.9 812 i b)Viết hàm cho mô hình hệ thống >> wh=tf(0.0907 ,1) *tf(25, [1 1])*tf (1, [0 .1 1])*tf(8,[0.4 1] ); >> wk=feedback(tf(0.0907 ,1) *tf(25, [1 1])*tf (1, [0 .1 1]),tf(8,[0.4 ... HỢP MỘT HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG Hệ Thống Điều Khiển Tốc Độ Động Cơ Hàm MatLab cho hệ thống >> w1=tf (1, 1); >> w2=tf(20,[2 1] ); >> w3=tf (15 , [1 0.5 1] ); >> w4=tf(0. 012 ,1) ; >> wh=w1*w2*w3*w4; >> ... đồ hệ thống X K1 (T 1s + T s + 1) ( 1) K K T 3s + Khảo sát hệ thống với k1=25 k2=8 t1 =1 t2=0 .1 t3=0.4 a) Xác định Kgh Viết hàm tính Kgh >> w=tf(25, [1 1])*tf (1, [0 .1 1])*tf(8,[0.4 1] ); >> rlocus(w)...
Ngày tải lên: 15/10/2012, 09:20
Bạn có muốn tìm thêm với từ khóa: