TỔNG QUAN VỀ ĐỀ TÀI
Giới thiệu về hãng xe Ford
Ford là một thương hiệu ô tô danh tiếng của Mỹ, với trụ sở chính tại Dearborn Được sáng lập bởi Henry Ford vào năm 1903, Ford đã trở thành biểu tượng của sự bền bỉ, mạnh mẽ và sang trọng trong ngành công nghiệp ô tô Logo nổi bật của hãng thể hiện thiết kế khỏe khoắn, gắn liền với hình ảnh một thương hiệu xe hơi nổi tiếng tại Mỹ.
Hãng xe Ford, trong những ngày đầu thành lập, có quy mô nhỏ và quy trình sản xuất đơn giản, chủ yếu hợp tác với các nhà cung ứng để lắp ráp xe với chỉ 2-3 công nhân cho mỗi chiếc Tuy nhiên, vào năm 1913, Ford đã giới thiệu mô hình lắp ráp dây chuyền tại nhà máy Highland Park, đánh dấu bước ngoặt quan trọng trong lịch sử phát triển của thương hiệu Để tìm hiểu thêm về lịch sử và sự phát triển của Ford, hãy cùng khám phá các mốc quan trọng của hãng xe này.
Các dòng xe hiện tại của hãng ford
Hiện nay, hãng xe ford có những dòng xe như sau được sản xuất và tiêu thụ trên toàn thế giới
Thông số kĩ thuật Xe Mondeo 2.5 AT
Chiều dài cơ sở (mm) 2754(mm)
Khoảng cách 2 bánh trước (mm) 1522
Khoảng cách 2 bánh sau (mm) 1537
Khoảng sáng gầm tối thiểu (mm) 128
Trọng lượng không tải (kg) 1515
Trọng lượng không tải (kg) 2020
Vào tháng 11/2004, Ford đã ra mắt phiên bản nâng cấp của Mondeo 2.0 AT và 2.5 AT, tập trung chủ yếu vào cải tiến thiết kế ngoại thất Phiên bản 2.5 AT được trang bị tiêu chuẩn với 3 màn hình LCD và hệ thống CD 10 đĩa chuyển đổi Cấu hình động cơ và hộp số vẫn giữ nguyên, chỉ có hệ thống bơm xăng mới được áp dụng cho động cơ 2.5 V6.
- Kiểu dáng đẹp, lịch sự, xe cũ vẫn đẹp
- Nhiều trang bị an toàn, tiện nghi
- Xe đầm, mức độ an toàn cao, chạy đường dài cực thích.
- Tốn nhiên liệu, mùa hè, đường phố HN đông đúc cứ phải xác định là 18 lít xăng/100km.
Nhiều trang thiết bị trên xe cũ nhiều năm thường không hoạt động ở trạng thái hoàn hảo, dẫn đến tình trạng hỏng vặt như màn hình không hoạt động, ghế lái không thể điều chỉnh tiến lùi, gương không tự gập, và nhiều vấn đề khác.
- Là một chiếc xe khó sửa chữa nếu chẳng may bị hỏng ở địa phương.
1.3 Hệ thống thay đổi chiều dài hiệu dụng đường ống nạp ACIS (Acoustic Control Induction System)
Ford Mondeo 2004 V6 sử dụng hai loại ống góp riêng biệt: ống dài và ống ngắn Các ống ngắn kết nối với dãy xi lanh gần nhất, trong khi các ống dài dẫn đến dãy đối diện, tạo ra sự sắp xếp không gian hợp lý Tuy nhiên, việc thiếu không gian buộc phải sử dụng các đường ống hẹp hơn, điều này không tối ưu cho động cơ hiệu suất cao Ở vòng tua máy thấp, không khí chủ yếu chạy qua ống góp dài, trong khi ở vòng tua máy cao, một van mở ra đường cắt ngắn để không khí tham gia vào ống góp sau đó.
-Van điều khiển khí nạp
Van điều khiển khí nạp nằm trong khoang khí nạp, và được mở/đóng để thay đổi chiều dài hiệu dụng của đường ống nạp thành 2 trạng thái.
Nhận tín hiệu từ mạch điều khiển làm đóng mở van
Mạch điều khiển có chức năng điều chỉnh việc đóng mở van, với cơ chế hoạt động dựa trên tốc độ động cơ Khi tốc độ động cơ thấp, van sẽ được đóng lại, cho phép không khí di chuyển qua đường ống dài Ngược lại, khi tốc độ động cơ tăng cao, van sẽ mở ra, tạo điều kiện cho không khí đi theo đường ống ngắn hơn.
1.4 Hoạt động của hệ thống thay đổi chiều dài hiệu dụng đường ống nạp ACIS:
-Khi van điều khiển khí nạp đóng (VSV ON)
Khi đông cơ làm việc ở tải, tốc độ trung bình ;
Khi động cơ hoạt động ở vòng tua và tốc độ thấp, ECU điều khiển động cơ điện kích hoạt van VSV để phù hợp với chu kỳ dao động dài Việc đóng van điều khiển kéo dài chiều dài hiệu dụng của đường ống nạp, tạo ra hiệu ứng dao động dòng khí, từ đó nâng cao hiệu quả nạp khí và công suất trong phạm vi tốc độ thấp và trung bình.
-Khi van điều khiển khí nạp mở (VSV OFF)
Khi động cơ làm việc ở tải, tốc độ cao:
ECU điều khiển van VSV tắt và giảm chiều dài hiệu dụng của ống nạp, dẫn đến việc giảm tổn thất khí động học và nâng cao hiệu quả nạp vào xilanh.
Khi vòng tua máy cao, ECU điều khiển động cơ điện tắt van VSV để phù hợp với chu kỳ dao động ngắn và áp suất khí quyển, mở van điều khiển Việc mở van điều khiển giúp rút ngắn chiều dài hiệu dụng của đường ống nạp, từ đó giảm tổn thất khí động học và tăng hiệu quả nạp vào xilanh Điều này tạo ra hiệu quả nạp không khí tối đa, gia tăng công suất ở dải tốc độ cao và giảm suất tiêu hao nhiên liệu.
Hệ thống thay đổi chiều dài hiệu dụng đường ống nạp ACIS (Acoustic Control
Ford Mondeo 2004 V6 sử dụng ống dài và ống ngắn riêng biệt, với ống ngắn dẫn đến dãy xi lanh gần nhất và ống dài đến dãy đối diện, tạo ra sự sắp xếp không gian hợp lý Tuy nhiên, việc thiếu không gian dẫn đến việc sử dụng các đường ống hẹp hơn, không phù hợp với động cơ hiệu suất cao Ở vòng tua máy thấp, không khí đi qua ống góp dài, trong khi ở vòng tua máy cao, một van mở ra đường cắt ngắn, cho phép không khí tham gia vào ống góp ở giai đoạn sau.
-Van điều khiển khí nạp
Van điều khiển khí nạp nằm trong khoang khí nạp, và được mở/đóng để thay đổi chiều dài hiệu dụng của đường ống nạp thành 2 trạng thái.
Nhận tín hiệu từ mạch điều khiển làm đóng mở van
Mạch điều khiển có chức năng điều chỉnh việc đóng mở van, với cơ chế hoạt động dựa trên tốc độ động cơ Khi động cơ hoạt động với tốc độ thấp, van sẽ được đóng lại, giúp không khí di chuyển qua đường ống dài Ngược lại, khi tốc độ động cơ tăng cao, van sẽ mở ra, cho phép không khí lưu thông qua đường ống ngắn hơn.
Hoạt động của hệ thống thay đổi chiều dài hiệu dụng đường ống nạp ACIS
-Khi van điều khiển khí nạp đóng (VSV ON)
Khi đông cơ làm việc ở tải, tốc độ trung bình ;
Khi động cơ hoạt động ở vòng tua và tốc độ thấp, ECU điều khiển động cơ điện kích hoạt van VSV để phù hợp với chu kỳ dao động dài Việc đóng van điều khiển kéo dài chiều dài hiệu dụng của đường ống nạp, tạo ra hiệu ứng dao động dòng khí, từ đó nâng cao hiệu quả nạp khí và công suất trong phạm vi tốc độ thấp và trung bình.
-Khi van điều khiển khí nạp mở (VSV OFF)
Khi động cơ làm việc ở tải, tốc độ cao:
ECU điều khiển van VSV khi tắt giúp giảm chiều dài hiệu dụng của ống nạp, từ đó giảm tổn thất khí động học và nâng cao hiệu quả nạp vào xilanh.
Khi vòng tua máy cao, ECU điều khiển động cơ điện tắt van VSV để phù hợp với chu kỳ dao động ngắn và áp suất khí quyển, mở van điều khiển Việc mở van điều khiển giúp rút ngắn chiều dài hiệu dụng của đường ống nạp, giảm tổn thất khí động học và tăng hiệu quả nạp vào xilanh Điều này tạo ra hiệu quả nạp không khí tối đa, từ đó tăng công suất ở dải tốc độ cao và giảm suất tiêu hao nhiên liệu.
LINH KIỆN, THIẾT BỊ SỬ DỤNG ĐỂ THIẾT KẾ
Các linh kiện đóng vai trò cảm biến
Chiết áp, hay còn gọi là potentiometer, là một phần tử điện trở có ít nhất một tiếp điểm di động, cho phép điều chỉnh điện áp Tiếp điểm di động này chia điện trở thành các phần có giá trị bù nhau, và khi một điện áp (tín hiệu) V được áp dụng, điện áp tại tiếp điểm sẽ được chia tỷ lệ theo các giá trị điện trở Chính điều này đã dẫn đến tên gọi "chiết áp".
- Điện trở của chiết áp được chế tạo theo hai nhóm vật liệu chính:
+ Màng than graphit hoặc tương đương, là các chiết áp phổ biến trong điện tử tiêu dùng.
+ Dây điện trở cao quấn lên trụ lõi, có độ chính xác, ổn định cao, dùng trong kỹ thuật điện tử đo đạc phân tích.
Các thiết bị IC
IC L293D là một bộ điều khiển động cơ với hai mạch cầu H tích hợp, cho phép điều khiển đồng thời hai động cơ DC theo cả chiều kim đồng hồ và ngược chiều kim đồng hồ Nó hoạt động như một bộ khuếch đại dòng cao, chuyển đổi tín hiệu dòng điện thấp ở đầu vào thành dòng điện cao hơn ở đầu ra, phù hợp cho việc điều khiển các tải như động cơ bước và động cơ DC L293D có nhiều tính năng nổi bật, bao gồm phạm vi điện áp nguồn đầu vào rộng, khả năng chống nhiễu cao và dòng điện đầu ra lớn Các ứng dụng phổ biến của IC này bao gồm trình điều khiển động cơ bước, trình điều khiển relay và trình điều khiển động cơ DC.
Có thể được sử dụng để chạy hai động cơ DC với cùng một IC.
Có thể kiểm soát tốc độ và hướng Điện áp động cơ Vcc2 (Vs): 4,5V đến 36V
Dòng động cơ cao nhất tối đa: 1.2A
Dòng động cơ liên tục tối đa: 600mA Điện áp cung cấp cho Vcc1 (vss): 4,5V đến 7V
Thời gian chuyển tiếp: 300ns (ở 5V và 24V)
Có các gói DIP, TSSOP, SOIC 16 chân
IC định thời kép tương đương L293D
L293D là một IC điều khiển động cơ 16 chân phổ biến, chủ yếu dùng để điều khiển động cơ Nó có khả năng điều khiển hai động cơ DC cùng lúc và cho phép điều chỉnh hướng độc lập cho từng động cơ Nếu bạn đang sử dụng động cơ với điện áp dưới 36V và dòng điện dưới 600mA, L293D là lựa chọn lý tưởng, đặc biệt khi được điều khiển bởi các mạch kỹ thuật số như Op-Amp, bộ định thời 555, cổng kỹ thuật số hoặc các vi điều khiển như Arduino, PIC, ARM.
-Cách sử dụng IC điều khiển động cơ L293D
IC điều khiển động cơ L293D rất dễ sử dụng, hoạt động dựa trên nguyên lý của Half H-Bridge H-Bridge là một thiết lập cho phép động cơ hoạt động theo cả hai hướng: chiều kim đồng hồ và ngược chiều kim đồng hồ IC này có khả năng điều khiển hai động cơ cùng một lúc theo bất kỳ hướng nào, với mạch kết nối được mô tả bên dưới.
Tất cả các chân ground cần phải được nối với mass IC này có hai chân nguồn: chân Vss (Vcc1) cung cấp điện áp hoạt động cho IC, cần kết nối với +5V, và chân Vs (Vcc2) cung cấp điện áp cho động cơ, có thể kết nối trong khoảng từ 4,5V đến 36V, trong trường hợp này là +12V.
Các chân Enable (Enable 1,2 và Enable 3,4) được sử dụng để kích hoạt đầu vào cho động cơ 1 và động cơ 2 Thông thường, cả hai động cơ sẽ được sử dụng, do đó, các chân này được giữ ở mức cao bằng cách kết nối với nguồn +5V Các chân đầu vào Input 1,2 điều khiển động cơ 1, trong khi Input 3,4 điều khiển động cơ 2 Các chân đầu vào có thể được kết nối với mạch kỹ thuật số hoặc vi điều khiển để điều chỉnh tốc độ và hướng của động cơ Bạn có thể thay đổi các chân đầu vào theo bảng hướng dẫn để điều khiển động cơ hiệu quả.
-Được sử dụng để điều khiển động cơ dòng cao bằng cách sử dụng mạch kỹ thuật số.
-Có thể được sử dụng để điều khiển động cơ bước.
-Có thể điều khiển LED dòng cao.
-Module trình điều khiển relay.
2.2.2 IC PCF8574 giao tiếp được với nhiều thiết bị chỉ qua một vài bước thiết đặt đơn giản, mạch tích hợp DIP Switch giúp dễ dàng thay đổi địa chỉ I2C.
IC chính: PCF8574 Điện áp hoạt động : 2.5~6VDC
Giao tiếp : I2C, thiết lập địa chỉ bằng DIP Switch.
Số chân giao tiếp mở rộng: 8 I/O.
Cấu hình địa chỉ I2C cho module với các chân A0, A1, A2 (địa chỉ mặc định là0X20):
ECU điều khiển
Arduino UNO có thể được cấp nguồn 5V qua cổng USB hoặc từ nguồn bên ngoài với điện áp khuyên dùng từ 7-12V DC, và giới hạn từ 6-20V Việc sử dụng pin vuông 9V là lựa chọn hợp lý nhất khi không có nguồn từ cổng USB.
GND (Ground) là cực âm của nguồn điện cung cấp cho Arduino UNO Khi sử dụng các thiết bị với nguồn điện riêng biệt, cần phải nối các chân GND với nhau để đảm bảo hoạt động ổn định.
5V: cấp điện áp 5V đầu ra Dòng tối đa cho phép ở chân này là 500mA.
3.3V: cấp điện áp 3.3V đầu ra Dòng tối đa cho phép ở chân này là 50mA.
Vin (Voltage Input): để cấp nguồn ngoài cho Arduino UNO, bạn nối cực dương của nguồn với chân này và cực âm của nguồn với chân GND.
IOREF trên Arduino UNO cho phép đo điện áp hoạt động của vi điều khiển, luôn ở mức 5V Tuy nhiên, bạn không nên sử dụng chân này để lấy nguồn 5V, vì chức năng chính của nó không phải là cấp nguồn.
RESET: việc nhấn nút Reset trên board để reset vi điều khiển tương đương với việc chân RESET được nối với GND qua 1 điện trở 10KΩ.
Arduino UNO có 14 chân digital cho phép đọc và xuất tín hiệu với hai mức điện áp 0V và 5V Mỗi chân có dòng vào/ra tối đa là 40mA và được trang bị các điện trở pull-up từ trong vi điều khiển ATmega328, tuy nhiên, các điện trở này không được kết nối mặc định.
Một số chân digital có các chức năng đặc biệt như sau:
Chân Serial 0 (RX) và 1 (TX) trên Arduino Uno được sử dụng để truyền (TX) và nhận (RX) dữ liệu TTL Serial, cho phép giao tiếp với các thiết bị khác Kết nối Bluetooth thường được xem là một dạng kết nối Serial không dây Nếu không cần giao tiếp Serial, bạn nên tránh sử dụng hai chân này để tiết kiệm tài nguyên.
Các chân PWM (~) 3, 5, 6, 9, 10 và 11 cho phép xuất xung PWM với độ phân giải 8 bit, tương ứng với giá trị từ 0 đến 255, tạo ra điện áp từ 0V đến 5V thông qua hàm analogWrite() Điều này cho phép bạn điều chỉnh điện áp ra ở các chân này một cách linh hoạt, khác biệt so với các chân khác chỉ có mức điện áp cố định là 0V hoặc 5V.
Chân giao tiếp SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK) Ngoài các chức năng thông thường, 4 chân này còn dùng để truyền phát dữ liệu bằng giao thức SPI với
Arduino UNO có 6 chân analog (A0 → A5) cung cấp độ phân giải tín hiệu 10bit
Arduino UNO cho phép đọc giá trị điện áp trong khoảng 0V đến 5V thông qua chân A0 đến A5 Bạn có thể sử dụng chân AREF để cung cấp điện áp tham chiếu, ví dụ nếu cấp 2.5V vào chân này, các chân analog sẽ đo điện áp từ 0V đến 2.5V với độ phân giải 10bit Ngoài ra, Arduino UNO còn có hai chân A4 (SDA) và A5 (SCL) hỗ trợ giao tiếp I2C/TWI với các thiết bị khác.
Các thiết bị sử dụng nền tảng Arduino được lập trình bằng một ngôn ngữ riêng, được phát triển dựa trên ngôn ngữ Wiring, vốn được thiết kế cho phần cứng nói chung Wiring là một biến thể của ngôn ngữ lập trình C/C++.
Cơ cấu chấp hành
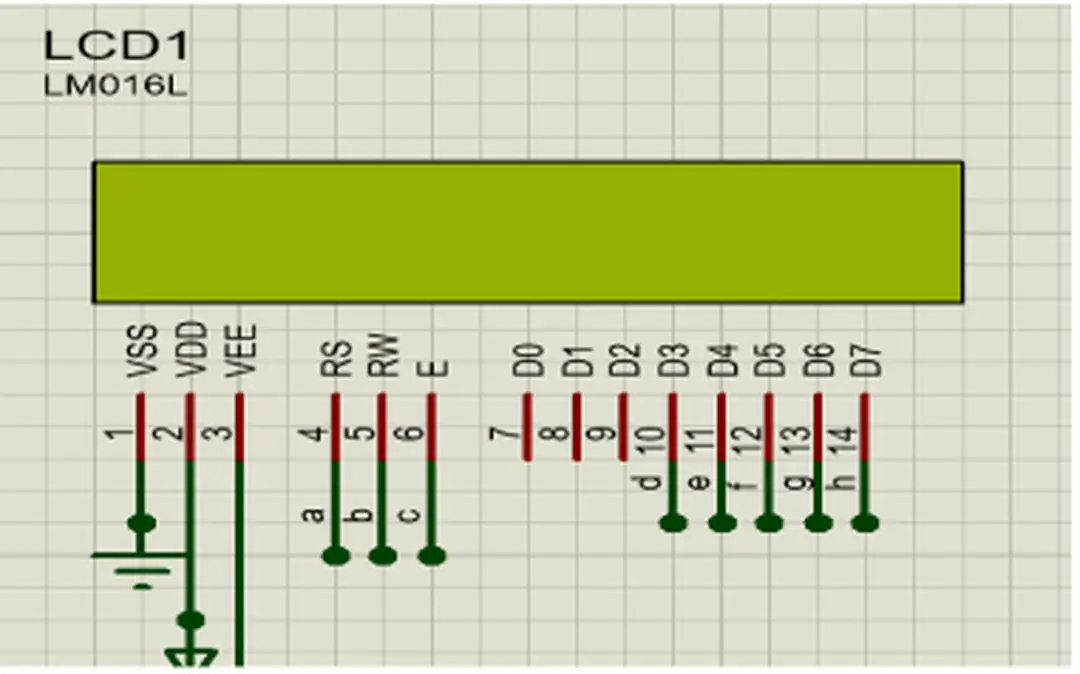
Thông số kỹ thuật LCD 16×2
LCD 16×2 được sử dụng để hiển thị trạng thái hoặc các thông số.
LCD 16×2 có 16 chân trong đó 8 chân dữ liệu (D0 – D7) và 3 chân điều khiển (RS, RW, EN).
5 chân còn lại dùng để cấp nguồn và đèn nền cho LCD 16×2.
Các chân điều khiển giúp ta dễ dàng cấu hình LCD ở chế độ lệnh hoặc chế độ dữ liệu.
Chúng còn giúp ta cấu hình ở chế độ đọc hoặc ghi.
LCD 16×2 có thể sử dụng ở chế độ 4 bit hoặc 8 bit tùy theo ứng dụng ta đang làm.
Hình 2.10 Chức năng các chân của LCD 16x2
2.4.2 Động cơ Servo Động cơ Servo là một phần của hệ thống vòng kín và bao gồm một số bộ phận cụ thể là mạch điều khiển, động cơ Servo, trục, chiết áp, bánh răng truyền động, bộ khuếch đại và bộ mã hóa (encoder) hoặc bộ phân giải. Động cơ Servo là một thiết bị điện độc lập, được sử dụng để quay các bộ phận của máy với hiệu suất cao và độ chính xác cao. Động cơ Servo là một cơ chế vòng kín kết hợp phản hồi vị trí để điều khiển tốc độ và vị trí quay hoặc tuyến tính. Động cơ được điều khiển bằng tín hiệu điện, analog hoặc digital, xác định chuyển động theo vị trí lệnh cuối cùng của trục.
Hình 2.11 Động cơ Servo Điều khiển động cơ Servo:
Sau khi tiến hành thử nghiệm, chúng ta có thể xác định các giá trị tương ứng trong khoảng thời gian mà các xung hoạt động cùng với động cơ servo Cụ thể, các xung có thời gian 0,6ms tương ứng với vị trí 0 độ, 1,45ms với 90 độ, và 2,3ms với 180 độ.
Tiến hành kết nối một thiết bị đo vạn năng để có thể nối tiếp với servo nhằm kiểm
Để điều khiển servo motor bằng Arduino một cách hiệu quả, chúng ta có thể sử dụng thư viện Arduino Việc cần làm là cài đặt thư viện này, xác định đối tượng servo và sử dụng hàm Attach để chỉ định chân kết nối của servo motor.
2.4.3 Động cơ DC Động cơ một chiều được gọi tắt là động cơ DC là động cơ được điều khiển bằng dòng điện theo hướng xác định Nói theo dế hiểu thì đây là động cơ hoạt động bằng nguồn điện áp DC điện áp 1 chiều Được cấu tạo từ các thành phần sau đây:
Stator: Bộ phận này đứng yên được sử dụng từ 1 hay nhiều cặp nam châm vĩnh cửu.
Rotor: Bộ phận có nhiệm vụ quay, chúng được cấu tạo từ lõi được quấn các cuộn dây.
Chổi than: Bộ phận này tiếp xúc và tiếp điện cho cổ góp.
Cổ góp: Có nhiệm vụ tiếp xúc và chia điện đồng đều cho các cuộn dây trên rotor.
Hình 2.12 Động cơ DC Điều khiển tốc độ động cơ một chiều bằng PWM
Phương pháp PWM (Pulse Width Modulation) được sử dụng để điều chỉnh điện áp đầu ra cho tải thông qua việc thay đổi độ rộng và chu kỳ của các xung vuông Phương pháp này làm thay đổi điện áp bằng cách giữ tần số cố định, chỉ khác nhau ở độ rộng của sườn dương hoặc sườn âm.
Phương pháp PWM là công nghệ chính trong các ứng dụng điều khiển, thường được áp dụng cho động cơ, bộ xung áp và điều áp PWM cho phép điều chỉnh tốc độ động cơ một cách hiệu quả, giúp duy trì sự ổn định trong quá trình hoạt động.
Nguyên lý điều khiển tốc độ động cơ một chiều bằng PWM dựa trên việc sử dụng mạch điện tử để điều chỉnh độ rộng xung ở ngõ ra mà không làm thay đổi tần số Khi độ rộng xung thay đổi, điện áp cũng sẽ thay đổi, từ đó ảnh hưởng đến tốc độ của động cơ.
Có thể áp dụng công thức:
TON là thời gian xung điện áp ở mức cao trong một chu kỳ T
TOFF là thời gian xung điện áp ở mức thấp trong một chu kỳ T
Phương pháp này giúp giảm thiểu tổn hao công suất trên thiết bị đóng cắt Khi khóa chuyển mạch ở trạng thái tắt, dòng điện không chạy qua, và khi khóa chuyển mạch mở, dòng điện sẽ được truyền đến tải.
2.4.4 Điện trở Điện trở được hiểu khái quát là sự cản trở dòng điện của một vật dẫn điện Nếu điện trở càng cao thì vật đó dẫn điện kém, ngược lại điện trở thấp sẽ là vật dẫn điện tốt.Đối với những vật cách điện sẽ có điện trở vô cùng lớn.
Khống chế dòng điện qua tải cho phù hợp.
Mắc điện trở thành cầu phân áp để có được một điện áp theo ý muốn từ một điện áp cho trước.
Phân cực cho bóng bán dẫn hoạt động.
Tham gia vào các mạch tạo dao động R C Điều chỉnh cường độ dòng điện đi qua các thiết bị điện.
Tạo ra nhiệt lượng trong các ứng dụng cần thiết.
Tạo ra sụt áp trên mạch khi mắc nối tiếp.
THIẾT KẾ HỆ THỐNG
Phân tích
Yêu cầu hệ thống bao gồm việc xoay bướm nạp và hiển thị góc xoay Đầu vào của hệ thống là tốc độ động cơ thông qua biến trở và nhiệt độ nước làm mát sử dụng cảm biến LM35 Đầu ra sẽ điều khiển góc bướm nạp bằng động cơ servo và điều chỉnh tốc độ động cơ DC.
– Khi nổ máy không tải, tốc độ động cơ thấp
Bướm ga điều chỉnh chiều dài hiệu dụng của ống nạp, giúp không khí đi qua đường ống ngắn hơn, từ đó kéo dài chiều dài hiệu dụng của ống nạp Điều này tạo ra hiệu ứng dao động dòng khí, nâng cao hiệu quả nạp khí và công suất ở tốc độ thấp và trung bình Kết quả là chế độ không tải được ổn định, cải thiện tính kinh tế nhiên liệu và khả năng khởi động của động cơ.
– Khi tốc độ động cơ cao:
Bướm ga điều chỉnh chiều dài hiệu dụng của đường ống nạp, cho phép không khí di chuyển qua đường ống ngắn (To), từ đó giảm tổn thất khí động học và nâng cao hiệu quả nạp vào xilanh Điều này tạo ra khả năng nạp không khí tối ưu, giúp tăng công suất ở dải tốc độ cao.
Lưu đồ thuật toán
Chương trình điều khiển
#include // Khai báo thư viện LCD
#include//Thư viện servo
LiquidCrystal_I2C lcd (0x20,16,2);//địa chỉ LCD và 16 cột 2 hàng
Servo sv; int dem=0;// Định nghĩa các chân int IN1; int IN2; int enA; int START; int IG=8; int OFF=7; void setup()
To initialize the LCD screen for Arduino, begin by connecting pin 9, setting the minimum and maximum values to 50 and 2050, respectively Use the command `lcd.init()` to start the LCD, allowing the Arduino to utilize the display Activate the LCD backlight with `lcd.backlight()`, and configure pins 11, 12, and 13 as output Set the cursor position to the first row and the first column with `lcd.setCursor(0,1)` and display the text "Toc do dc:" using `lcd.print()` Finally, implement a loop from 2 to 6 for further operations.
{pinMode(i,OUTPUT);} pinMode(7,INPUT); pinMode(8,INPUT); pinMode(10,INPUT);
{ sv.write(xung);} void dkdc(int pwm)// hàm điều khiển động cơ DC dùng pwm thay đổi tốc độ { digitalWrite(12,LOW); digitalWrite(13,HIGH); analogWrite(11,pwm);
Để chuyển đổi giá trị điện trở thành góc quay servo, ta sử dụng hàm `analogRead(0)` để đọc giá trị điện áp từ chân A0 Giá trị này sau đó được ánh xạ từ khoảng 0 đến 1023 thành khoảng 0 đến 90 độ cho góc quay servo, và từ 0 đến 255 cho tín hiệu PWM, vì giá trị tối đa của 8 bit là 255 Điều kiện kiểm tra trạng thái của hai chân số 7 và 8 cũng được thực hiện để xác định hành động tiếp theo.
(digitalRead(10)==LOW))// Trạng thái khi khóa điện OFF
To reset the timer to zero if the Start button is pressed before the designated time, set the cursor on the LCD to position (11,1) and display "0" to indicate a speed of 0 Clear the display at position (14,1) and stop the motor by calling the function `dkdc(0)`.
} if ((digitalRead(8)==HIGH) && (digitalRead(7)==LOW) &&
{if (dem100))
{ if (pwm==0)// trạng thái động cơ đã chạy
// trường hơp chạy không tải
{ dkdc(50); xoaybuom(0); lcd.setCursor(11,1); lcd.println(50);
{ // trường hợp động cơ chạy bằng tốc độ pwm dkdc(pwm); delay(1000); xoaybuom(0); lcd.setCursor(11,1); lcd.println(pwm);} else
{ // trường hợp động cơ chạy bằng tốc độ pwm dkdc(pwm); delay(1000); xoaybuom(xung1); lcd.setCursor(11,1); lcd.println(pwm);
Kết luận chung
Qua quá trình học tập, nghiên cứu làm đề bài được giao, chúng em đã làm được các công việc sau:
+ Đánh giá tổng quan được hệ thống điều khiển thay đổi chiều dài hiệu dụng trên xe ford monde 2004.
+ Lập trình điều khiển được hệ thống điều khiển thay đổi chiều dài hiệu dụng trên xe ford monde 2004 trên Arduino.
+ Xây dựng mô phỏng điều khiển hệ thống thay đổi chiều dài hiệu dụng trên xe ford mondeo 2004 trên Proteus.
Do trình độ năng lực bản thân có hạn và thời gian không dài nên còn nhiều thiếu sót em rất mong được sự thông cảm.
Trong quá trình thực hiện bài tập cá nhân, tôi đã nhận được sự hỗ trợ quý báu từ thầy giáo Nguyễn Ngọc Tú, người đã định hướng và giúp tôi hoàn thiện bài tập Tôi cũng xin cảm ơn thầy cô trong khoa Cơ khí Động lực trường ĐHSP Kỹ thuật Hưng Yên và tập thể lớp 121192 đã cùng đồng hành trong suốt quá trình học tập Cuối cùng, tôi chân thành cảm ơn những người thân và bạn bè đã động viên và tạo điều kiện cho tôi hoàn thành bài tập này.