McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated Part 2 docx

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated Part 2 docx
... reduce friction and gain higher efficiency than con- ventional leadscrews. Figure 1-1 2 Worm-drive systems can provide high speed and high torque. Figure 1-1 3 Ballscrew-driven single-axis slide mechanism ... to achieve smooth, high-speed motion without overstressing the ser- Figure 1-6 Ballscrew-driven single-axis slide mechanism with- out position feedback sensors. Figure 1-7...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated Part 1 pot
... Crawlers 22 2 Wheeled Vertical Pipe Crawlers 22 3 Tracked Crawlers 22 4 Other Pipe Crawlers 22 4 External Pipe Vehicles 22 6 Snakes 22 6 Chapter 9 Comparing Locomotion Methods 22 7 What Is Mobility? 22 9 The ... System 22 9 Size 23 0 Efficiency 23 1 The Environment 23 2 Thermal 23 2 Ground Cover 23 3 Topography 23 3 Obstacles 23 4 Complexity 23 5 Speed and Cost 23 5 The Mo...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated Part 3 pptx
... bellows and helixes, as shown in Figure 1-1 6. The bellows con- figuration (a) is acceptable for light-duty applications where misalign- Figure 1-1 5 Flexible shaft cou- plings adjust for and accommo- date ... VR motor step angles are 15 and 30º per step. The 30º angle is obtained with a 4-tooth rotor and a 6-pole stator, and the 15º angle is achieved with an 8-tooth rotor and...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated Part 4 doc
... or forward. The bidirec- tional digital linear actuator shown in Figure 1-3 3 can provide linear res- Figure 1-3 3 This light-duty lin- ear actuator based on a perma- nent-magnet stepping motor ... positioning antenna reflectors, opening and closing security gates, handling materials, and raising and lowering scis- sors-type lift tables, machine hoods, and light-duty jib crane arm...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 5 doc
... especially in teleoperated vehicles. Figure 2- 1 Flat, O-ring, and V-belt profiles and pulleys Figure 2- 2 Variable Belt 88 Chapter 2 Indirect Power Transfer Devices pitch diameter: The diameter of ... belts, plastic -and- cable chain, and all types of steel chain connect the input to the output mechanically by means of teeth just 71 76 Chapter 2 Indirect Power Transfer Device...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 6 ppsx
... is both com- pact and simple. 1 12 Chapter 3 Direct Power Transfer Devices Figure 3-9 Figure 3-1 0 Figure 3-1 1 Figure 3-1 2 Figure 3-1 3 1 02 Chapter 2 Indirect Power Transfer Devices HIGH-SPEED GEARHEADS ... their numbers of teeth. Two-stage (Figure 2- 2 6) and four-stage (Figure 2- 2 7) gear reducers are made by combining flexible and solid gears with multiple...
Ngày tải lên: 10/08/2014, 04:22
McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 7 pot
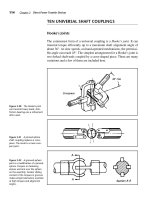
... couplings are ideal for toys, instruments, and other light-duty mechanisms. For heavy duty, such as the front-wheel drives of Figure 3 -2 3 A pinned-sleeve shaft-coupling is fastened to one saft that ... the homokinetic plane at all times. Another constant-velocity joint, the Bendix-Weiss, also incorporates balls. Figure 3 -2 5 Figure 3 -2 6 Figure 3 -2 7 This flexible shaft permits an...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 9 ppt
... drive -and- brake steering sys- tem. Controlling the speed of each track directly adds a second major drive source, but gives fine steering and speed control. A second improvement to drive -and- brake ... impor- tant part of steel track design. This lowered pivot is shown in Figure 5 -2 . Tracked vehicles, even autonomous robots, will drive on finished roads at some point in their life,...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 10 ppt
... there. Figures 7-8 and 7-9 show four- and six-legged walkers with three rotary-actuated joints in each leg. An eight-leg layout would have no less than 24 actuators. The four- and six-legged versions ... designing a walk- ing robot. Figure 7-1 4 Six-legged tripod-frame walker with single-DOF legs Chapter 7 Walkers 20 9 Figure 7-8 Independent leg walker, four legs, twelve D...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 11 ppsx
... suspension and locomotion systems are frequently quite simple. Figures 8-1 and 8 -2 show two examples. Figure 8-1 Four-wheeled horizontal pipe crawler Chapter 8 Pipe Crawlers and Other Special Cases 22 1 VERTICAL ... spaced trees. There are, then, two width parameters, alley width and turning-around-a-post width. 22 2 Chapter 8 Pipe Crawlers and Other Special Cases Traction...
Ngày tải lên: 10/08/2014, 04:22
- watch law and order svu closure part 2
- law and order svu closure part 2 synopsis
- law and order svu closure part 2 ending
- law and order svu closure part 2 recap
- law and order svu closure part 2 summary
- xem phim harry potter and the deathly hallows part 2 bản đẹp
- xem phim harry potter and the deathly hallows part 2 hd