bài tập d3 điều khiển đèn giao thông với 3 đèn đơn
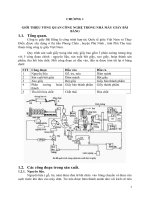
Bài tập lớn Điều khiển hệ thống sấy trong quá trình xeo của nhà máy giấy Bãi Bằng
... 22: Cấu trúc mạch vòng điều khiển độ ẩm Trong vòng điều khiển phía vòng điều khiển áp suất nhóm lô sấy Bộ điều khiển thường dùng cho điều khiển áp suất PI PID Vòng điều khiển bù giá trị thời gian ... tới điều khiển áp suất sau: 21 Hình 21: Phân bố giá trị đặt r tới điều khiển áp suất nhóm Như trình bày trên, vòng điều khiển độ ẩm tờ giấy vòng điều khiển cascade, sơ đồ khối vòng điều khiển ... 16170 18500 37 600 4550 18700 17200 19900 24500 1800 21500 49500 4150 31 500 4150 35 000 4200 4200 37 000 39 000 4200 4200 26500 32 500 4150 18000 19 1.2 .3. 3 Bộ phận ép Hình 3: Bộ phận lô ép Thông số...
Ngày tải lên: 15/10/2013, 15:58

BAI TAP BLC ĐIỀU KHIỂN HỆ THỐNG VÔ NƯỚC CHAI
... Network 6: LD M0.4 TON T37,10 Network 7: LD M0.0 A T37 LPS AN T38 = Q0 .3 LPP TON T38 ,30 Network 8: LD M0.0 A T38 TON T39,10 Network 9: LD M0.0 LD T39 O M0.2 ALD AN M0 .3 = M0.2 Network 10: LD ... +M0.1 (3) = 0(hành trình xuống dừng) đếm thời gian T37(6) = đếm thời gian 1s, sau 1s T37(7) = Q0 .3( 7) = 1(mở van xã nước vào chai) đồng thời đếm thời gian T38 đếm thời gian, sau 3s T38(7)= Q0 .3( 7) ... thường mở (NO) -Gọi biến cố điều khiển trạng thái m( start), Pa, A, a0 , a1 Biến cố điều khiển trình : BT1, BT 2, A+ ,A , Đèn báo , Van xã (VX) Mô tả grafcet Sơ đồ động lực 3. Cấu hình vào /ra Ngõ...
Ngày tải lên: 02/04/2015, 23:21

Bài tập lớn ĐIỀU KHIỂN CHUYỂN ĐỘNG RÔBÔT BẰNG ĐỘNG CƠ BƯỚC
... T2* 30 p 40 19 XTAL1 12MHz 30 p 18 29 30 31 RD\ WR\ T1 T0 INT1 INT0 TXD RXD Vcc XTAL2 PSEN\ ALE EA\ RET 17 16 15 14 13 12 11 10 Vss Po.7 Po.6 Po.5 Po.4 Po .3 Po.2 Po.1 Po.0 32 33 34 35 36 37 38 39 ... +Mạch điều khiển động +Thiết kế mơ hình động +Viết chương trình điều khiển II.Sơ đồ khối hệ thống Khối điều khiển Khối học III.Thiết kế phân tích ngun lý khối 1.Khối điều khiển Để điều khiển ... ULN20 03 : Nối hai IC ULN20 03 với : + Đầu vào chân từ 1-4 IC với đầu tương ứng bit thấp cao 89C51 + Đầu nối với chân A, B, C, D động bước Sơ đồ nối chân cụ thể giống hình vẽ tổng quan mạch điều khiển...
Ngày tải lên: 10/09/2012, 11:47

Bài tập lớn điều khiển truyền động điện
... điện đèn báo 2.Bảng xác định ký hiệu địa vào/ra: 3. Sơ đồ kết nối PLC với nguồn ngoại vi: Với: T1 : rơ le trung gian điều khiển công tắc tơ K T2,T3,T4,T5,T6 : rơ le trung gian tương ứng điều khiển ... gian T để điều khiển công tắc tơ TG,1G,2G,3G,1K,2K • Tín hiệu đóng /cắt điện cho đèn báo 2.Bảng xác định ký hiệu địa vào/ra: 12 3. Sơ đồ kết nối PLC với nguồn ngoại vi: 13 Với T1,T2,T3,T4,T5,T6 ... tắc tơ 3G Mở tiếp điểm 2G3 cắt điện rơle thời gian 3Rt Rơle thời gian 3Rt điện đóng chậm tiếp điểm 3Rt1.Sau khoảng thời gian tcđ(3Rt) (kể từ rơ le thời gian 3Rt điện) đóng tiếp điểm 3Rt1 cấp...
Ngày tải lên: 15/03/2013, 11:03

Bài tâp vi điều khiển
... unsigned long int n,x; unsigned char code M[10]={0x30,0x31,0x32,0x 33, 0x34,0x35,0x36,0x37,0x38,0x39}; void main(void) { SCON=0x52; TMOD=0x20; TH1=TL1= -3; TR1=1; IE=0x90; while(1); } void ngatnt(void) ... M[10]={0x31,0x32,0x 33, 0x34,0x35,0x36,0x37,0x38,0x39,0x30}; void congtac(void) { if (K==1); else { while(!K); putchar(M[x]); x++; }} void main(void) { SCON=0x52; TMOD=0x20; TH1=TL1= -3; TR1=1; ... int n,x; unsigned char code M[10]={0x31,0x32,0x 33, 0x34,0x35,0x36,0x37,0x38,0x39,0x30}; void main(void) { SCON=0x52; TMOD=0x20; TH1=TL1= -3; TR1=1; IE=0x81; IT0=1; while(1); } void ngat0(void) interrupt...
Ngày tải lên: 18/09/2013, 23:12

Bài tập lớn điều khiển số - Dũng
... Bài tập lớn môn: ĐIỀU KHIỂN SỐ a) Tìm miền giá trị a b để hệ thống hoàn toàn điều khiển được: Từ hệ: (*) Ta có ma trận sau : Để hệ thống hoàn toàn điều khiển ma trận điều khiển full ... Lực Bài tập lớn môn: ĐIỀU KHIỂN SỐ -0,2±j0,1 là: 13 11 K = 30 60 4) Sử dụng MATLAB minh họa kết trên: % Dùng MATLAB minh họa: %Với miền giá trị a b hệ thống hoàn toàn quan sát điều khiển ... -0.2-i*0.1] P= -0.2000 + 0.1000i -0.2000 - 0.1000i >> K=place(A,B,P) K= 0. 433 3 0.1 833 >> sysD_cl=ss(A-B*K,B,C,D,-1) a= x1 x2 x1 -0. 133 3 0.01667 x2 -0.8667 -0.2667 % Nhập vị trí điểm cực cho % Tìm hệ số...
Ngày tải lên: 15/10/2013, 15:38

Bài tập lớn điều khiển số
... ứng với trường hợp, sau chuyển sang số mũ âm sau: 2.528e-5 z+2.523e-5 Wz1= z −1.993z+0.9 938 Wz2= 8. 431 e-6 z +3. 367e-5 z+8.404e-6 z −1.9 3z+0.9 38 Wz3= 1. 236 e-5 z +2.525e-5 z+1.263e-5 z −1.9 3z+0.9 ... hàm truyền điều khiển hệ kín sau: −2 3 Gr= Gk1= 14 8 39 40 z +2493z 0.941 −0 .34 16 z−1−0.493z−2−0.106 z 3 58 5+0.2 95z−1−0.1042z−2−0.5 23 z 3+ 0.24 9z−4+0 9 637 z−5 −1 −2 −4 1−1.904z +0.9043z −5 51e- ... +x3.z (với điều kiện x1+x2+x3=1¿ x =0 .3; x =0 .3; x =0.4 ta chọn suy Gk2 Gr= Gzi4 1−Gk2 −1 −2 3 Gk2=0 .3 z +0 .3 z −0.4 z Hàm truyền đạt điều chỉnh là: Chương trình matlab T2 = 0.01e -3; x1=0 .3; x2=0 .3; x3=0.4;...
Ngày tải lên: 15/10/2013, 15:39

Bài tập lớn Điều khiển sấy trong Nhà máy giấy Full
... 22: Cấu trúc mạch vòng điều khiển độ ẩm Trong vòng điều khiển phía vòng điều khiển áp suất nhóm lô sấy Bộ điều khiển thường dùng cho điều khiển áp suất PI PID Vòng điều khiển bù giá trị thời gian ... tới điều khiển áp suất sau: 21 Hình 21: Phân bố giá trị đặt r tới điều khiển áp suất nhóm Như trình bày trên, vòng điều khiển độ ẩm tờ giấy vòng điều khiển cascade, sơ đồ khối vòng điều khiển ... 16170 18500 37 600 4550 18700 17200 19900 24500 1800 21500 49500 4150 31 500 4150 35 000 4200 4200 37 000 39 000 4200 4200 26500 32 500 4150 18000 19 1.2 .3. 3 Bộ phận ép Hình 3: Bộ phận lô ép Thông số...
Ngày tải lên: 15/10/2013, 15:58

Bài tập lớn - Điều khiển số - Điều khiển tự động
... việc thiết kế hệ điều khiển cho động xoay chiều phức tạp chi phí cao so với động chiều, nhờ phát triển mạnh công nghệ điều khiển số Điều khiển tự động 2- K 43 Bài tập lớn Điều khiển số kỹ thuật ... liệu theo hướng lên thiết bị ngoại vi cần đến chốt liệu 74HC3 73 Điều khiển tự động 2- K 43 13 Bài tập lớn Điều khiển số Vi mạch 74HC3 73 có chứa mạch D-flip-flop, mạch lưu giữ vào linh kiện liệu ... f=feedback(g1,1) Transfer function: 0.0 038 18 z^2 + 0.01 436 z + 0.0 033 7 Điều khiển tự động 2- K 43 21 22 Bài tập lớn Điều khiển số z ^3 - 2.764 z^2 + 2.561 z - 0.7754 Sampling...
Ngày tải lên: 23/10/2013, 13:15

Tài liệu Bài tập lớn điều khiển số doc
... tụ điện dùng xung điều khiển điều khiển vi điều khiển Giá trị điện áp động điều chỉnh huặc biên độ điện áp chiều – chỉnh lưu điều khiển huặc băm xung áp.Điện áp điều chỉnh điều chỉnh thời gian ... 2 Bài tập lớn Điều khiển số Tín hiệu vào đối tượng điều khiển tín hiệu liên tục, tín hiệu vào máy tính tín hiệu số Trên sở sơ đồ khối hệ thống điều khiển số xây dựng sơ đồ khối hệ thống điều khiển ... 0. 035 z-0. 035 Step tich phan 0.00 037 65z-0.00 037 65 0.005z vi phan zoh 0.02s+1 0.00021 0.1s+1 bien tan dong co Scope 24 Bài tập lớn Điều khiển số 2:Phân tích mạch bù : Chất lượng hệ thống điều khiển...
Ngày tải lên: 22/12/2013, 16:15

Bài Tập Lớn Điều Khiển Số
... 9.191 z + 5. 832 e-015 -z^2 - 3. 338 e-015 z Transfer function: 9.191 z ^-1+ 5. 832 e-015z^-1 -1 - 3. 338 ez^-1-015 z^-2 Sampling time: 0.1 Sampling time: 0.1 Ta chọn khâu điều chỉnh ... s ) = Gi ( s ) = 9.191 =¿ (1+0 03S)(1+4.7916 7e−0 4S) 9.191 =¿ 0 1 437 5S +0 034 7916S+1 Chuyển sang miền Z (với chu kì trích mẫu T=0.1s) [9.191 ],[0.0 01 437 50.0 34 79161] ≫GI1=tf ¿ ≫GI2=c2d(GI1,0.1,'zoh') ... điều khiển vị trí khâu P Tổng hợp theo tiêu chuẩn modul tối ưu đối xứng: τ=2Tω⇒Rφ=¿ ¿ 1+4∗2TωS K N (1+8T ωS) KN K N = 2=+ 32 Tω S 4T ω 32 T ω S KN 2 ∗8(2Tω) S (1+2Tω S) (1+2Tω S)S F= 1+4τS 22 33 ...
Ngày tải lên: 31/12/2013, 22:44

Tài liệu Bài tập lớn Điều khiển số 1 ppt
... f=feedback(g1,1) Transfer function: 0.0 038 18 z^2 + 0.01 436 z + 0.0 033 7 Điều khiển tự động 2- K 43 22 23 Bài tập lớn Điều khiển số z ^3 - 2.764 z^2 + 2.561 z - 0.7754 Sampling ... việc thiết kế hệ điều khiển cho động xoay chiều phức tạp chi phí cao so với động chiều, nhờ phát triển mạnh công nghệ điều khiển số Điều khiển tự động 2- K 43 Bài tập lớn Điều khiển số kỹ thuật ... k1 = −2. 239 Mô Simulink: Step 1 z z Unit Delay Unit Delay1 -1,0792 K -2.245 K k2= -1.06 K k1= -2. 239 K Điều khiển tự động 2- K 43 Scope 33 Bài tập lớn Điều khiển số CHƯƠNG 5: PHẦN MỀM GIAO DIỆN...
Ngày tải lên: 19/01/2014, 14:20

Tài liệu Bài tập lớn Điều khiển số doc
... bằng: I = Quách Kỳ Lân Điều khiển tự động 2- K 43 U ref R , ; etc Bài tập lớn Điều khiển số Sơ đồ tương đương : Quách Kỳ Lân Điều khiển tự động 2- K 43 14 15 Bài tập lớn Điều khiển số Cách đấu điện ... tâm so sánh với tốc độ đặt trước, tính toán Quách Kỳ Lân Điều khiển tự động 2- K 43 Bài tập lớn Điều khiển số 12 sai lệch Sau đưa liệu điều khiển biến tần thông qua ADC gián tiếp điều khiển tốc ... thiết kế hệ điều khiển cho động xoay chiều phức tạp chi phí cao so với động chiều, nhờ phát triển mạnh công nghệ điều khiển số Quách Kỳ Lân Điều khiển tự động 2- K 43 Bài tập lớn Điều khiển số kỹ...
Ngày tải lên: 19/01/2014, 14:20

Tài liệu Bài tập lớn Điều khiển số 1 LỜI NÓI ĐẦU Trong những năm gần đây công pdf
... DAC, phần kết hợp với tín hiệu /IOW Quách Kỳ Lân Điều khiển tự động 2- K 43 14 Bài tập lớn Điều khiển số thông qua mạch NOR 74HC022 đầu vào để kích hoạt chốt liệu 74HC3 73. Chip 74HC3 73 chốt liệu dùng ... Lân Điều khiển tự động 2- K 43 22 23 Bài tập lớn Điều khiển số z ^3 - 2.768 z^2 + 2.547 z - 0.7788 Sampling time: 0.005 » f=feedback(g1,1) Transfer function: 0.0 038 18 z^2 + 0.01 436 z + 0.0 033 7 ... Lân Điều khiển tự động 2- K 43 30 Bài tập lớn Điều khiển số W3 Giả thiết Bên máy tính Trong máy tính W1 ,W2 , W3 Wbu1 , Wbu Sơ đồ khối sử dụng máy tính : sp SS D/A Sum1 W1 W2 Wbu1 sum2 A/D Wbu W3...
Ngày tải lên: 19/01/2014, 14:20

Bài tập dài điều khiển robot công nghiệp part 2 potx
... (Create Subsystem) Thiết kế điều khiển PD bù trọng trường - Mô hình toán học robot: M = H (q ) q + V ( q, q ) + G ( q ) Trong ma trận H, V, G xác định theo - Thuật toán điều khiển: M dk = K P e − ... q + G ( q ) Trong đó: sai lệch góc qay: Tham số điều khiển K KP = K1 e = qd − q Tao khối: K KD = 0 K Tạo khối: Mô hình điều khiển matlab: π / qd = π / 0 q0 = ... khuếch đại tỷ lệ đạo hàm lựa chọn: 150 KP = 15 Kết mô phỏng: Góc quay khớp 1,2: 3. 50 KD = 3. 5 Sai lệch góc quay khớp 1,2 ...
Ngày tải lên: 01/04/2014, 01:20

Bài tập dài điều khiển robot công nghiệp doc
... O3x3y3z3 có gốc O3 đặt bàn tay robot Bốn trục z0, z1, z2, z3 nằm mặt phẳng tờ giấy b Bảng D-H Căn vào thông số hệ toạ độ thiết lập ta có bảng thông số DH robot sau: i θi di αi θ1 l1 θ2 l2 d1 -d3 ... toán điều khiển: t U dk K p e K I e( )d Trong đó: e qd q : sai số vị trí hệ thống Mô hình simulink điều khiển: Creat subsystem Tổng hợp điều khiển: Xác định tham số điều khiển cho điều ... d3 = 1- z; Ta xác định 10 0.28 - Góc ban đầu: 20 2.06 d30 0.8 1d 0.01 1.9 - Góc đặt: 2d d3d 0.6 Mô hình điều khiển: ...
Ngày tải lên: 01/04/2014, 01:20

ứng dụng vi điều khiển pic16f877a giao tiếp với máy tính thông qua cảm biến nhiệt lm35 thể hiện nhiệt độ môi trường trên phần mềm visual basic
... Resister) 23 2 .3 Stack 23 Khỏi quỏt v chc nng ca cỏc port vi iu khin PIC16F877A 24 3. 1 Port A : .24 3. 2 Port B : .25 3. 3 Port C : .25 3. 4 Port D : ... 30 a Timer1 : 30 b Timer1 cú ch hot ng : 30 c Cỏc ghi lien quan n Timer1 bao gm : 31 4 .3 Timer2 : 32 a Timer2 : 32 b Hot ng ca b Timer2 : 32 ... khin hot ng ca timer: 33 Ngt (INTERRUPT) : .33 Phng phỏp iu ch xung PWM cho PIC16F877A : 38 6.1 iu ch PWM l gỡ ? .38 6.2 Nguyờn lý ca PWM : 38 6 .3 Cỏch thit lp ch PWM...
Ngày tải lên: 10/05/2014, 12:36

Bài tập môn điều khiển tự động pot
... function: -770 s^5 + 31 .07 s^4 + 3. 787 s ^3 - 0 .38 59 s^2 + 0.009 038 s + 0.000 134 4 -9680 s^5 + 1608 s^4 + 105 s ^3 + 2.5 23 s^2 + 0. 030 16 s + 0.000 134 4 >> step(wkin) ... Transfer function: -9747 s^5 + 1140 s^4 - 49 .33 s ^3 + 0.1871 s^2 + 0. 032 83 s + 0.000256 6498 s^5 + 35 91 s^4 + 108 s ^3 + 4.71 s^2 + 0.06566 s + 0.000256 >> ... wkinpi=feedback(wdt*wpi,1) Transfer function: -285 s^4 + 39 s ^3 - 2.199 s^2 + 0.04651 s + 0.000192 -27075 s^5 + 38 00 s^4 + 30 1.2 s ^3 + 5 .33 9 s^2 + 0.1012 s + 0.000192 >> step(wkinpi)...
Ngày tải lên: 22/06/2014, 01:20

Giáo án Tin Học lớp 10: Bài tập và thực hành 4 GIAO TIẾP VỚI HỆ ĐIỀU HÀNH WINDOWS pptx
... làm việc với: cửa sổ, biểu tượng, bảng chọn, HS: Quan sát sau thực thao tác: thay đổi kích thước cửa sổ, làm việc với biểu tượng, bảng chọn, Củng cố dặn dò Chú ý thao tác làm việc với cửa sổ, ... chọn, Củng cố dặn dò Chú ý thao tác làm việc với cửa sổ, bảng chọn, biểu tượng Chuẩn bị trước tập thực hành 5: đọc lại quy tắc đặt tên tệp, thư mục ...
Ngày tải lên: 07/08/2014, 20:22

BÀI TẬP VI ĐIỀU KHIỂN 89C51(1) doc
... dần từ Bài ết nối Led đơn P0 công tắc thường hở đến P3.1 Viết chương trình điều khiển Led hoạt động theo yêu cầu sau: - Khi P3.1 = Led đơn sáng dần từ sau nhấp nháy 10 lần - Khi P3.1 = Led đơn sáng ... P3.0, LED đơn p0 LED P2 Viết chương trình điều khiển LED hiển thị theo yêu cầu: - Khi P3.0 = LED hiển thị số từ số đến số ngược lại - Khi P3.0 = LED đơn sáng dần tắt dần ngược chiều 10 lần Bài ... nối 16 Led đơn P0 – P1 công tắc thường hở đến P3.2 Viết chương trình điều khiển Led hoạt động theo yêu cầu sau: - Khi P3.2 = 16 Led đơn sáng dần từ tắt dần từ vào - Khi P3.2 = 16 Led đơn sáng dần...
Ngày tải lên: 08/08/2014, 06:21