MỤC LỤC CHƯƠNG 1 GIỚI THIỆU VỀ HỆ THỐNG CÂN BẰNG BALL AND BEAM 6 1 1 Tổng quan về hệ thống cân bằng ball and beam 6 1 2 Phương pháp điều khiển 6 1 3 Ý tưởng kết cấu và sơ đồ của hệ thống 7 1 3 1 Sơ đồ khối chức năng của thệ thống 7 CHƯƠNG 2 PHÂN TÍCH VÀ THIẾT KẾ HỆ THỐNG CÂN BẰNG BALL BEAM 9 2 1 phân tích hệ thống 9 2 2 Thiết kế bộ điều khiển và thiết kế phần cứng 9 2 2 1 Bộ điều khiển PID 9 2 2 2 Thiết kế cơ khí 11 2 2 3 Lưu đồ thuật toán 11 2 3 Giới thiệu các linh kiện trong mạch 14 CHƯƠNG 3 T.
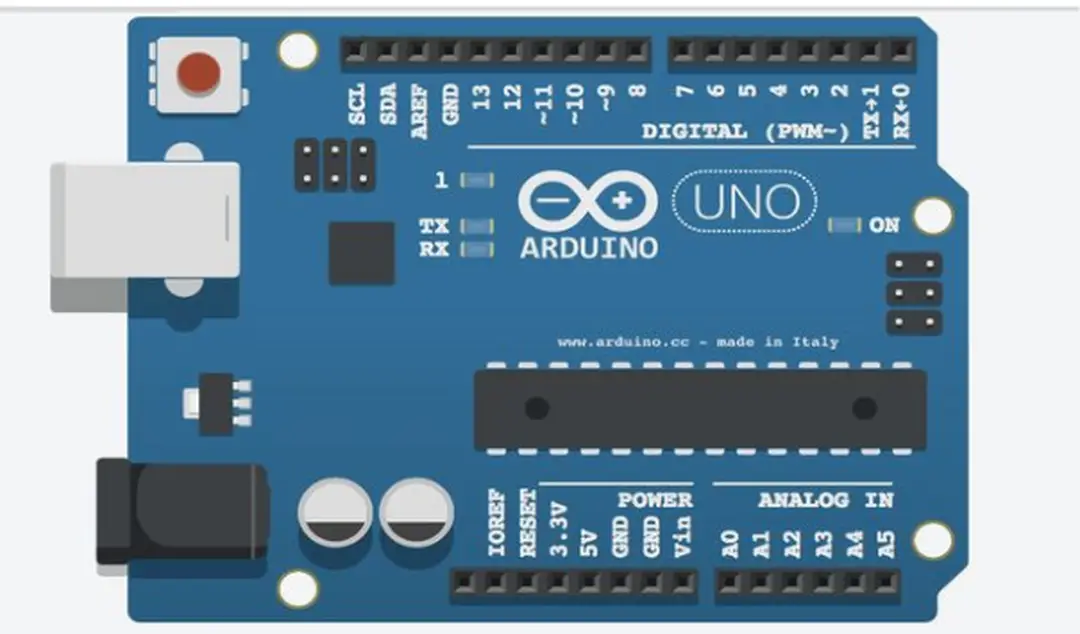
MỤC LỤC CHƯƠNG 1: GIỚI THIỆU VỀ HỆ THỐNG CÂN BẰNG BALL AND BEAM 1.1 Tổng quan hệ thống cân ball and beam 1.2 Phương pháp điều khiển 1.3 Ý tưởng kết cấu sơ đồ hệ thống 1.3.1 Sơ đồ khối chức thệ thống CHƯƠNG PHÂN TÍCH VÀ THIẾT KẾ HỆ THỐNG CÂN BẰNG BALL BEAM 2.1 phân tích hệ thống 2.2 Thiết kế điều khiển thiết kế phần cứng 2.2.1 Bộ điều khiển PID 2.2.2 Thiết kế khí 2.2.3 Lưu đồ thuật toán 2.3 Giới thiệu linh kiện mạch CHƯƠNG THỰC THI VÀ TRIỂN KHAI SẢN PHẨM 3.1 Mơ hình sản phẩm 3.2 Code chương trình DANH MỤC BẢNG BIỂU VÀ HÌNH VẼ Hình 1.1 kết cấu hệ thống Hình 1.2 Sơ đồ hệ thống ball and beam Hình2.1 Sơ đồ khối điều khiển PID Bảng 2.1 Bảng đặt tính luật điều khiển PID Hình 2.2 Mơ hình thiết kế SolidWork Hình 2.3 Sơ đồ khối điều khiển Hình 2.4 Sơ đồ khối điều khiển PID Hình 2.5 Sơ đồ khối điều khiển góc quay động Hình 2.6 Vi xử lí Arduino UNO R3 Bảng 2.2 Thơng số arduino UNO R3 Hình 2.7 Các cổng vào Hình 2.8 LCD 16x2 Hình 2.9 Sơ đồ chân LCD 16x2 Hình 2.10 Sơ đồ chân I2C Bảng 2.3 Sơ đồ nối chân i2c lcd với Arduino Hình 2.11 Sơ đồ đấu nối giao tiếp IC2 với LCD 16x2 Hình 2.12 Bảng cấu hình sảm phẩm Hình 2.13 Động Cơ RC Servo MG996R bánh đồng Hình 2.14 Sơ đồ động servo RC Hình 2.14 Điều khiển động Servo MG996R với Arduino Hình 2.15 Sơ đồ mạch điều khiển Arduino Hình 2.16 Cảm biến khoảng cách IR SHARP GP2Y0A21YK0F Hình 2.17 Kích thước Cảm biến khoảng cách IR SHARP GP2Y0A21YK0F Hình 2.18 Đặc tính đo khoảng cách (đầu ra) Hình 2.19 Cảm biến khoảng cách IR GP2Y0A21YK0F với sơ đồ đấu dây Arduino Hình 2.20 Sơ đồ chân cảm biến khoảng cách IR GP2Y0A21YK0F SHARP Hình 3.1 mơ hình sản phẩm CHƯƠNG 1: GIỚI THIỆU VỀ HỆ THỐNG CÂN BẰNG BALL AND BEAM 1.1 Tổng quan hệ thống cân ball and beam Hệ thống cân bóng mơ hình thực nghiệm quen thuộc, với cấu tạo vật lý đơn giản tương đối phức tạp mặt động lực học Nó có độ bất ổn định cao sở để tạo hệ thống tự cân như: hệ thống phóng tên lửa, cân máy bay theo phương ngang, xe tự hành…Nó thường liên quan đến vấn đề kiểm soát thực tế ổn định theo chiều ngang máy bay hạ cánh luồng khơng khí hỗn loạn Mơ hình ball and beam sử dụng nhiều phịng thí nghiệm trường giới Mục đích hệ thống cân bóng ngang tác động ngoại cảnh, mơ hình dùng cảm biến để phát vị trí bóng sử dụng camera với kỹ thuật xử lý ảnh để phát vị trí bóng, hệ thống cịn dùng động để điều khiển góc quay ngang ngồi cịn sử dụng thêm cảm biến tra góc nghiêng Thanh làm nhiều chất liệu khác gỗ, nhựa, meca, nhôm Chiều dài tùy vào người thiết kế Quả bóng thơng thường hình cầu có kích thước đủ lớn để cảm biến xác định được làm nhựa, sắt Cảm biến xác định vị trí cảm biến siêu âm, hồng ngoại, dây điện trở camera, ngồi cịn có cảm biến xác định góc nghiêng Động động encoder servo 1.2 Phương pháp điều khiển Sử dụng cảm biến khoảng cách xác định vị trí bóng thanh, truyền tín hiệu Board mạch Arduino Thuật tốn PID tích hợp sẵn Arduino để xử lý khác biệt tín hiệu vị trí mong muốn thực thành tín hiệu điều khiển Arduino gửi tín hiệu điều khiển đến động servo xoay để thay đổi vị trí bóng đáp ứng khoảng cách mong muốn 1.3 Ý tưởng kết cấu sơ đồ hệ thống Cảm biến khoảng cách ball beam Động servo Hình 1.1 kết cấu hệ thống 1.3.1 Sơ đồ khối chức thệ thống Cảm biến khoảng cách: IR SHARP GP2Y0A21YK0F LCD hiển thị Khối VXL – VĐK Nguồn cấp Động servo: Hình 1.2 Sơ đồ hệ thống ball and beam • Chức khối - Nguồn cấp: có chức biến đổi dịng điện xoay chiều 220v thành dòng chiều cung cấp cho khối hoạt động - Bộ điều khiển: có chứa vi điểu khiển Arduino uno r3 Nhận tín hiệu từ khối cảm biến đưa về, cho hiển thị hình LCD điều khiển động servo - LCD hiển thị: hiển thị thông tin khối điều khiển đưa tới - Động servo MG996R: Nhận tín hiệu từ khối VXL – VĐK để điều khiển hệ thống CHƯƠNG PHÂN TÍCH VÀ THIẾT KẾ HỆ THỐNG CÂN BẰNG BALL BEAM 2.1 phân tích hệ thống Vị trí bóng xác định nhờ cảm biến, vi điều khiển arduino tích hơp điều khiển PID, nhận sai lệch vị trí bóng vị trí bóng mong muốn, từ chỉnh thơng số Kp , Ki Kd để đưa tín hiệu điều khiển động thay đổi góc nghiêng đưa bóng vị trí mong muốn Kết hệ thống ổn định, độ vọt lố thấp cho thấy bóng cân nhanh sau tác động nhiễu sử dụng điều khiển PID không phức tạp mặt giải thuật đáp ứng nhanh thời gian thực để cân bóng 2.2 Thiết kế điều khiển thiết kế phần cứng 2.2.1 Bộ điều khiển PID Giải thuật tính tốn PID hay gọi điều khiển ba khâu, bao gồm: Propotional (tỉ lệ), Integral (tích phân) Derivative (đạo hàm) Giá trị tỉ lệ xác định tác động sai số tại, giá trị tích phân xác định tác động tổng sai số khứ giá trị vi phân xác định tác động tốc độ biến đổi sai số Tổng chập ba tác động dùng để điều chỉnh q trình thơng qua phần tử điều khiển Nhờ vậy, giá trị làm sáng tỏ quan hệ thời gian: P phụ thuộc vào sai số tại, I phụ thuộc vào tích lũy sai số khứ D dự đoán sai số tương lai, dựa vào tốc độ thay đổi Hình 2.1 Sơ đồ khối điều khiển PID Trong đó: Setpoint : giá trị mong muốn đạt ngõ đối tượng điều khiển Process variable : tín hiệu hồi tiếp mà điều khiên nhận từ đối tượng điều khiển Control variable : giá trị ngõ điều khiển Error: giá trị sai lệch giá trị đặt giá trị ngõ đối tượng điều khiển Output : đại lượng vật lý cần điều khiển Bộ điều khiển PID biểu diễn theo phương trình sau: Ta chọn hệ số PID phương pháp tinh chỉnh tay dựa bảng đặt tính điều khiển PID: Thông số Thời gian độ Độ vọt lố Thời gian đáp ứng Sai số ổn định Kp Giảm Tăng Ít thay đổi Giảm Ki Giảm Tăng Tăng Khử Kd Ít thay đổi Giảm Giảm Ít thay đổi Bảng 2.1 Bảng đặt tính luật điều khiển PID Chọn Kp trước: Thử điều khiển P với hệ thống cân bóng điều chỉnh Kp cho thời gian đáp ứng đủ nhanh, chấp nhận độ vọt lố nhỏ Thêm thành phần D để loại bỏ độ vọt lố, tăng Kd từ từ, thử nghiệm chọn giá trị thích hợp Sai số ổn định (State-steady error) xuất Thêm thành phần I để giảm sai số ổn định Tăng Ki từ bé đến lớn để giảm sai số ổn định, đồng thời không độ vọt lố xuất trở lại 2.2.2 Thiết kế khí Hình 2.2 Mơ hình thiết kế SolidWork 2.2.3 Lưu đồ thuật tốn Giải thích: Hàm millis() có nhiệm vụ trả số thời gian (tính theo mili giây) kể từ lúc mạch Arduino bắt đầu chương trình Đầu tiên ta khởi tạo biến time cho time = millis() thời gian bắt đầu chương trình, biến t thời gian lấy mẫu Câu lệnh millis > (time + t) nghĩa thời gian hệ thống mà lớn thời gian ban đầu thời gian lấy mẫu bắt đầu tính tốn PID • Sơ đồ khối điều khiển Khai báo thư viện , , , Thiết lâp tín hiệu Serial=9600 Khởi tạo Kp, Ki, Kd, diemdat, time, t Khởi tao cm, PID_p,PID_i, PID_D, PID-_total time=millis() millis> (time+t) Đọc khoảng cách từ cm time = millis() xử lý PID Quy đổi giá trị PID_total góc Điều khiển góc quay động Hình 2.3 Sơ đồ khối điều khiển • Sơ đồ khối điều khiển PID Loi_khoang_cach = diemat - cm sai - Trọng lượng: 5g - Tích hợp Jump chốt để cung cấp đèn cho LCD ngắt - Tích hợp biến trở xoay điều chỉnh độ tương phản cho LCD Hình 2.10 Sơ đồ chân I2C • Giao tiếp i2c lcd với Arduino: MODULE LCD 16x2 ARDUINO R3 GND GND VCC VCC SDA A4/SDA SCL A5/SCL Bảng 2.3 Sơ đồ nối chân i2c lcd với Arduino Hình 2.11 Sơ đồ đấu nối giao tiếp IC2 với LCD 16x2 Động Servo MG996R Động RC Servo MG996 loại thường sử dụng nhiều thiết kế Robot dẫn hướng xe Động RC Servo MG996 có lực kéo mạnh, khớp bánh làm hồn tồn kim loại nên có độ bền cao, động tích hợp sẵn Driver điều khiển động bên theo chế phát xung - quay góc nên dễ sử dụng • Thơng số kỹ thuật Động Cơ RC Servo MG996R - Servo MG996R (nâng cấp MG995) có momen xoắn lớn - Momen làm việc : 11kg/cm (tại điện áp 6V) , 9.4kg/cm (tại điện áp 4.8V) - Đây nâng cấp từ servo MG995 tốc độ, lực kéo độ xác - Phù hợp với máy bay cánh quạt loại 50 -90 methanol máy bay cánh cố định xăng 26cc-50cc - So với MG946R, MG996R nhanh hơn, nhỏ - Tốc độ xoay: 0.17 giây / 60 độ (4.8 v) 0.14 giây / 60 độ (6 v) - Điện áp làm việc: 4.8-7.2V - Nhiệt độ hoạt động: -30 ℃ ~ 60 ℃ - Chiều dai dây: 30cm, dây nâu đỏ dây nguồn, dây vàng dây tín hiệu - Vật liệu bánh răng: Kim loại - Trọng lượng: 65g Hình 2.12 Bảng cấu hình sảm phẩm Hình 2.13 Động Cơ RC Servo MG996R bánh đồng • Cách hoạt động động Servo MG996R Một servo tiêu chuẩn thường bao gồm động điện nhỏ, chiết áp, thiết bị điện tử điều khiển hộp số Vị trí trục đầu đo liên tục chiết áp bên so sánh với vị trí đích điều khiển đặt (ví dụ: Arduino) Thiết bị điện tử điều khiển điều chỉnh vị trí thực tế trục đầu để khớp với vị trí mục tiêu Đây biết đến hệ thống điều khiển vịng kín Hộp số giảm tốc độ động làm tăng mômen xoắn trục đầu Tốc độ tối đa trục đầu thường vào khoảng 60 RPM Hình 2.14 Sơ đồ động servo RC • Kiểm sốt Servo: Động servo điều khiển cách gửi tín hiệu PWM (điều chế độ rộng xung) đến đường tín hiệu servo Chiều rộng xung xác định vị trí trục đầu Khi bạn gửi tín hiệu cho servo có độ rộng xung 1,5 mili giây (ms), servo di chuyển đến vị trí trung tính (90 độ) Vị trí tối thiểu (0 độ) tối đa (180 độ) thường tương ứng với độ rộng xung tương ứng ms ms Lưu ý điều khác loại nhãn hiệu động servo khác (ví dụ: 0,5 2,5 ms) Nhiều servo xoay qua khoảng 170 độ (hoặc chí 90) vị trí mức 1,5 ms Động servo thường mong đợi xung sau 20 mili giây 50 Hz nhiều servo RC hoạt động tốt phạm vi từ 40 đến 200 Hz • Điều khiển động Servo MG996R với Arduino Là động servo mơ-men xoắn cao có bánh kim loại với mơ-men xoắn 10 kg-cm Mơ-men xoắn cao có dịng ổn định servo 2.5A Dòng điện chạy từ 500mA đến 900mA điện áp hoạt động từ 4,8 đến 7,2V Hình 2.14 Điều khiển động Servo MG996R với Arduino Hình 2.15 Sơ đồ mạch điều khiển Arduino Cảm biến khoảng cách IR SHARP GP2Y0A21YK0F Hình 2.16 Cảm biến khoảng cách IR SHARP GP2Y0A21YK0F Hình 2.17 Kích thước Cảm biến khoảng cách IR SHARP GP2Y0A21YK0F Cảm biến khoảng cách Sharp lựa chọn phổ biến cho nhiều dự án yêu cầu đo khoảng cách xác Cảm biến IR tiết kiệm so với máy đo khoảng cách sonar, cung cấp hiệu suất tốt nhiều so với lựa chọn thay IR khác Giao tiếp với hầu hết vi điều khiển đơn giản: đầu tương tự kết nối với chuyển đổi tương tự-kỹ thuật số để thực phép đo khoảng cách đầu kết nối với so sánh để phát ngưỡng Phạm vi phát phiên khoảng 10 cm đến 80 cm (4 "đến 32") • Thơng số kỹ thuật - Điện áp hoạt động: 4,5 V đến 5,5 V - Mức tiêu thụ dịng điện trung bình: 30 mA ( lưu ý: cảm biến tạo dòng điện lớn, ngắn nhà sản xuất khuyến nghị đặt tụ điện 10 µF lớn nguồn mặt đất gần cảm biến để ổn định đường cấp điện) - Phạm vi đo khoảng cách: 10 cm đến 80 cm (4 "đến 32") - Loại đầu ra: Analog - Chênh lệch điện áp đầu phạm vi khoảng cách: 1,9 V (điển hình) - Thời gian cập nhật: 38 ± 10 ms - Kích thước: 44,5 mm × 18,9 mm × 13,5 mm (1,75 ″ × 0,75 ″ × 0,53 ″) - Trọng lượng: 3,5 g (0,12 oz) • Cách hoạt động cảm biến khoảng cách IR Cảm biến khoảng cách IR sử dụng chùm ánh sáng hồng ngoại phản xạ lại vật thể để đo khoảng cách vật thể Khoảng cách tính tốn cách sử dụng phương pháp tam giác chùm ánh sáng Cảm biến bao gồm đèn LED hồng ngoại phát ánh sáng PSD (Thiết bị Cảm biến Vị trí) Khi chùm ánh sáng bị phản xạ vật thể, chùm tia phản xạ đến máy dò ánh sáng 'điểm quang học' hình thành PSD Khi vị trí vật thể thay đổi, góc chùm tia phản xạ vị trí điểm PSD thay đổi theo Xem điểm A điểm B hình Lưu ý thay đổi góc chùm tia phản xạ vị trí 'điểm quang học' PSD Cảm biến tích hợp mạch xử lý tín hiệu Mạch xử lý vị trí điểm quang học PSD để xác định vị trí (khoảng cách) đối tượng phản xạ Nó xuất tín hiệu tương tự phụ thuộc vào vị trí đối tượng phía trước cảm biến • đọc giá trị cảm biến khoảng cách IR: Cảm biến khoảng cách IR xuất tín hiệu tương tự, tín hiệu thay đổi tùy thuộc vào khoảng cách cảm biến đối tượng Từ biểu liệu, thấy điện áp đầu SHARP GP2Y0A21YK0F nằm khoảng từ 2,3 V vật cách 10 cm đến 0,4 V vật cách 80 cm Biểu đồ cho thấy lý phạm vi phát sử dụng 10 cm Nhận thấy điện áp đầu vật cách cm điện áp đầu cho vật cách 28 cm Do đó, phạm vi phát sử dụng bắt đầu sau đỉnh khoảng 10 cm 2,3 V Hình 2.18 Đặc tính đo khoảng cách (đầu ra) Biểu đồ cho thấy nhược điểm cảm biến này, phản hồi phi tuyến tính Nói cách khác, thay đổi lớn điện áp đầu lúc tương ứng với thay đổi lớn phạm vi Để xác định khoảng cách cảm biến đối tượng, bạn cần tìm hàm chuyển đổi điện áp đầu thành giá trị phạm vi • Kết nối cảm biến IR GP2Y0A21YK0F với Arduino: Sơ đồ đấu dây bên cho bạn thấy cách kết nối cảm biến khoảng cách IR GP2Y0A21YK0F với Arduino Hình 2.19 Cảm biến khoảng cách IR GP2Y0A21YK0F với sơ đồ đấu dây Arduino Các loại cảm biến khoảng cách có xu hướng ồn, nên thêm tụ điện Vcc GND Biểu liệu đề xuất tụ điện từ 10 µF trở lên (tơi sử dụng 220 µF) Kết nối dây dẫn dương tụ điện với kết nối dây Vcc dây dẫn âm với kết nối dây GND (xem hình) Tụ điện thường đánh dấu đường sọc cho biết dây dẫn âm Dây dẫn dương thường dài dây dẫn âm - Kết nối GP2Y0A21YK0F GP2Y0A21YK0F (Vàng) (Đen) (Đỏ) Arduino A0 GND 5V Hình 2.20 Sơ đồ chân cảm biến khoảng cách IR GP2Y0A21YK0F SHARP CHƯƠNG THỰC THI VÀ TRIỂN KHAI SẢN PHẨM 3.1 Mơ hình sản phẩm Hình 3.1 mơ hình sản phẩm 3.2 Code chương trình #include #include #include #define chan A2 #define model 1080 Servo dc; float time; float loi_khoang_cach_truoc,loi_khoang_cach; int t= 50; float kp=3; float ki=0.2; float kd=1300; float diemdat= 19; float PID_p, PID_i, PID_d, PID_total; int cm; SharpIR cb = SharpIR(chan, model); void setup() { Serial.begin(9600); dc.attach(9); time = millis(); } void loop() { if (millis() > time+t) { time = millis(); loi_khoang_cach= diemdat - cm; PID_p = kp * loi_khoang_cach; PID_d = kd*((loi_khoang_cach - loi_khoang_cach_truoc)/t); if(-3 < loi_khoang_cach && loi_khoang_cach < 3) { PID_i = PID_i + (ki * loi_khoang_cach); } else { PID_i = 0; } PID_total = PID_p + PID_i + PID_d; PID_total = map(PID_total, -150, 150, 0, 150); if(PID_total < 20){PID_total = 20;} if(PID_total > 160) {PID_total = 160; } dc.write(PID_total+30); loi_khoang_cach_truoc = loi_khoang_cach; } cm= cb.distance(); Serial.print("vi tri la: "); Serial.print(cm); Serial.println(" cm"); } • Đánh giá kết luận - Đánh giá: Mơ hình thực tế hệ thống tương đối ổn định (có nhiều nguyên do), với giá trị đặt xa khó ổn định cảm biến khoảng cách hoạt động chưa xác dẫn đến sai số Giá trị nhận đo sai lệch nhiều cấu tạo hình cầu bóng Góc quay động đáp ứng với vị trí bóng - Kết luận: Một mơ hình tốn học hệ thống cân bóng phát triển định luật vật lý điện Các giá trị tham số điều khiển (Kp, Ki Kd) có cách sử dụng phương pháp điều chỉnh thủ cơng từ mơ mơ hình thực tế để hệ thống phản hồi tốt Từ kết thử nghiệm, thấy tham số điều khiển mang lại phản hồitốt hệ thống là: Kp= 3, Ki = 0.2 Kd = 1300 Vì bóng nhựa nhẹ nên qn tính lực ma sát lên khác so với sắt nên để bóng cân phải tốn nhiều thời gian ... sơ đồ đấu dây Arduino Hình 2.20 Sơ đồ chân cảm biến khoảng cách IR GP2Y0A21YK0F SHARP Hình 3.1 mơ hình sản phẩm CHƯƠNG 1: GIỚI THIỆU VỀ HỆ THỐNG CÂN BẰNG BALL AND BEAM 1.1 Tổng quan hệ thống cân. .. cân ball and beam Hệ thống cân bóng mơ hình thực nghiệm quen thuộc, với cấu tạo vật lý đơn giản tương đối phức tạp mặt động lực học Nó có độ bất ổn định cao sở để tạo hệ thống tự cân như: hệ thống. .. 1.1 kết cấu hệ thống Hình 1.2 Sơ đồ hệ thống ball and beam Hình2.1 Sơ đồ khối điều khiển PID Bảng 2.1 Bảng đặt tính luật điều khiển PID Hình 2.2 Mơ hình thiết kế SolidWork Hình 2.3 Sơ đồ khối điềuĐỒ ÁN HỆ THỐNG CÂN BẰNG BALL AND BEAM
33
42
0
THÔNG TIN TÀI LIỆU
Thông tin cơ bản
| Tiêu đề | Đồ Án Hệ Thống Cân Bằng Ball And Beam |
|---|---|
| Trường học | Trường Đại Học Kỹ Thuật |
| Chuyên ngành | Kỹ Thuật Điều Khiển |
| Thể loại | Đồ án |
| Định dạng | |
|---|---|
| Số trang | 33 |
| Dung lượng | 2,91 MB |
Nội dung
Ngày đăng: 11/07/2022, 15:55
HÌNH ẢNH LIÊN QUAN














TỪ KHÓA LIÊN QUAN
TRÍCH ĐOẠN
TÀI LIỆU CÙNG NGƯỜI DÙNG
TÀI LIỆU LIÊN QUAN
-
84 7 0
-
213 2 0
-
81 29 0
-
91 218 3
-
79 14 0
-
33 685 16
-
40 1,3K 31
-
48 298 3