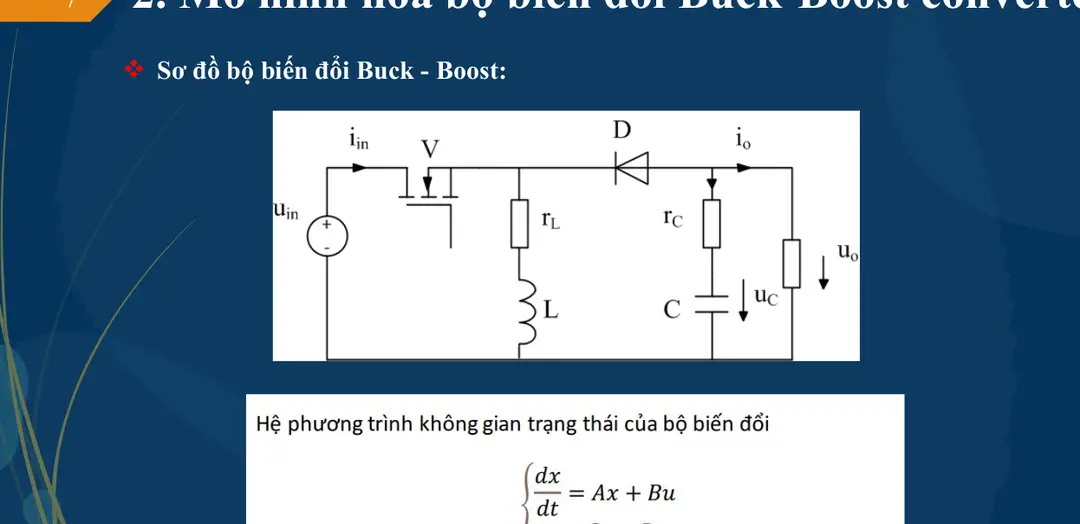
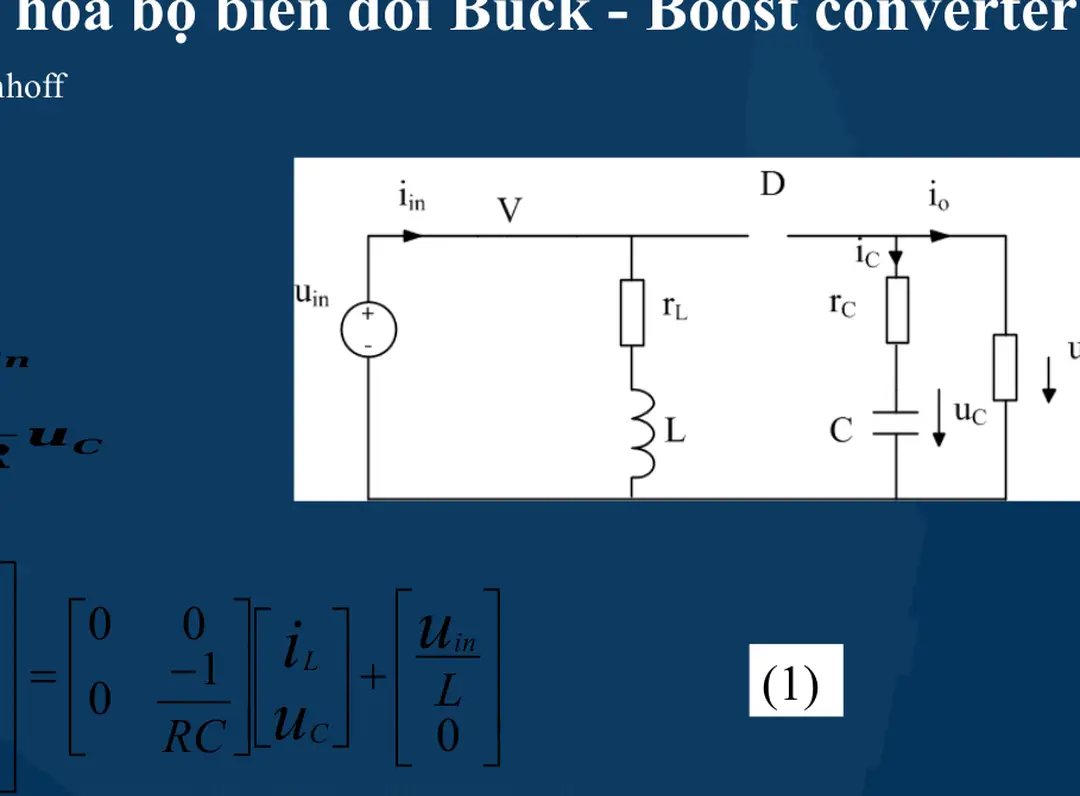
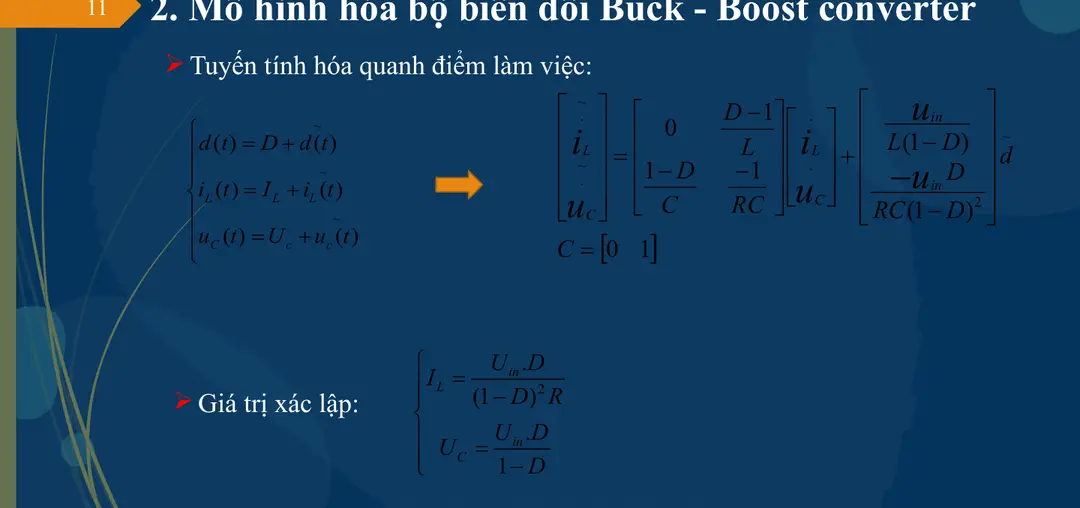
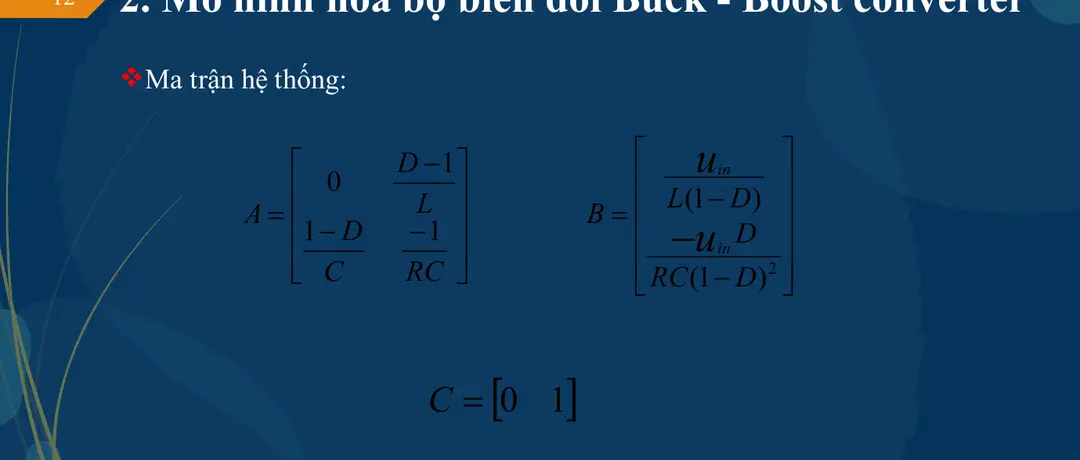
Thiết kế mạch vòng điều khiển cho bộ biến đổi buck boost theo phương pháp phản hồi trạng thái
30
17
0
THÔNG TIN TÀI LIỆU
Thông tin cơ bản
| Tiêu đề | Thiết Kế Mạch Vòng Điều Khiển Cho Bộ Biến Đổi Buck - Boost Theo Phương Pháp Phản Hồi Trạng Thái |
|---|---|
| Tác giả | Phạm Văn Đồng, Nguyễn Văn Đức, Trương Thanh Hằng, Đào Mạnh Dương |
| Người hướng dẫn | PGS.TS. Trần Trọng Minh |
| Trường học | Trường Đại Học |
| Thể loại | Đồ Án Tốt Nghiệp |
| Năm xuất bản | 2018 |
| Thành phố | Hà Nội |
| Định dạng | |
|---|---|
| Số trang | 30 |
| Dung lượng | 1,38 MB |
Nội dung
Ngày đăng: 23/04/2022, 07:28
HÌNH ẢNH LIÊN QUAN


TÀI LIỆU CÙNG NGƯỜI DÙNG
TÀI LIỆU LIÊN QUAN
-
30 82 0
-
31 10 0
-
26 11 0
-
28 35 0
-
20 44 0
-
25 255 6
-
25 89 0
-
23 52 1