Tài liệu Bài báo cáo vi điều khiển Robot do đường doc

Tài liệu Bài báo cáo vi điều khiển Robot do đường doc
... 6 Mắt dò đường 8 Mạch nguyên lý 8 Mạch in 8 II. CODE Robot dò đường 9 III. Đồ án Robot dò đường dùng vi điều khiển 89S52 18 2 Bài báo cáo vi điều khiển Robot do đường I. Mạch Mạch điều khiển 89S52 Mạch ... KHIỂN ROBOT DÒ ĐƯỜNG 1 MỤC LỤC MỤC LỤC 2 Bài báo cáo vi điều khiển Robot do đường 3 I. Mạch 3 Mạch điều khiển 89S52 3 Mạch ngu...
Ngày tải lên: 20/01/2014, 11:20

Tài liệu Bài báo cáo vi điều khiển - Trường cao đẳng kỹ thuật Cao Thắng ppt
... Ghi Ghi Ghi Ghich ch ch chú ú ú ú: : : :C C C Cá á á ác c c cô ô ô ôb b b bó ó ó óng ng ng ngm m m mờ ờ ờ ờl l l là à à àb b b bê ê ê ên n n nngo ngo ngo ngoà à à ài i i it t t tầ ầ ầ ầm m m mho ho ho hoạ ạ ạ ạt t t tđộ độ độ động. ng. ng. ng. L L L Lư ư ư ưu u u uý ý ý ý1: 1: 1: 1:NguồnRCcómộtthờigianTADtiêubiểucủa4us. 2: 2: 2: 2:CácgiátrịnàyviphạmthờigiantốithiểuTAD. 3: 3: 3: 3:Cho Cho Cho...
Ngày tải lên: 19/02/2014, 09:20

Báo cáo Vi điều khiển.pdf
... Q H :Q A với chốt dữ liệu 8 bit. Dữ liệu chỉ được đưa vào qua 1 pin SER và được điều khiển bởi các pin RCK (pin điều khiển chốt dữ liệu) , SCK (pin điều khiển vi c dòch dữ liệu vào IC thông qua ... ngoại vi khác để phát huy tối đa khả năng của vi điều khiển. 4.2 VI ĐIỀU KHIỂN PIC16F877A VÀ IC GHI DỊCH 74HC595 Mục đích sử dụng IC 74HC595 là nâng cao số lượ...
Ngày tải lên: 20/08/2012, 09:07

BÁO cáo VI điều KHIỂN DSPIC30F4011
... Thiết kế và chế tạo Matrix Led-32x16 hiển thị Tiếng Vi t SV:Bùi Ngọc Trang SHSV:20092802 BÁO CÁO VI ĐIỀU KHIỂN DSPIC30F4011 Tên Đề Tài: LED Matrix 16x32 I.Giới thiệu về VĐK Dspic30f4011 1. ... indicator (RI) Tránh tín hiệu mạng dữ liệu Dữ liệu được nhận Dữ liệu được gửi Đầu dữ liệu sẵn sàng Đất của tín hiệu Dữ liệu sẵn sàng Yêu cầu gửi Xoá để gửi Báo chuông d.Giới thiệu về IC...
Ngày tải lên: 15/10/2013, 17:34

Tài liệu Vài điểm về vi điều khiển doc
... Bài vi t này vi t cho IRF. Grenoble, 12/05/2005 Falleaf@irfvn.com Chào các bạn, Có thể nói, hiện nay vi điều khiển đã rất phổ biến ở Vi t Nam, và được ứng dụng rất nhiều. Những sinh vi n ngành Điện, Điện Tử, Cơ Điện Tử, Tin Học, Vi n Thông hầu như ai cũng biết cách để làm vi c với vi điều khiển. Tuy nhiên, để vi t một bài vi t tổng quát về vi điều khiển và vi c lập trình cho...
Ngày tải lên: 12/12/2013, 09:16

Tài liệu Bài giảng: Kỹ thuật điều khiển tự động doc
... điện điều khiển nam châm. Có thể điều khiển con trượt ở vị trí bất kỳ trong phạm vi điều chỉnh nên van tỷ lệ có thể gọi là loại van điều khiển vô cấp. Hình 7-3 d. Van servo * Nguyên lý làm vi c: ... KẾ HỆ THỐNG ĐIỀU KHIỂN THỦY LỰC 7.1. Các phần tử thủy lực cơ bản 7.1.1. Van điều khiển a. Van trượt có mép điều khiển dương, trung gian và âm Hình 7-1. Sơ đồ các loại m...
Ngày tải lên: 16/12/2013, 03:15

Tài liệu Bài báo cáo đồ án tốt nghiệp: Thiết kế Phân xưởng Reforming Xúc tác với năng suất 820000 tấn/năm và mô phỏng phân xưởng phân tách sản phẩm bằng phần mềm ProII ppt
... Cân B Cân B ằ ằ ng V ng V ậ ậ t Ch t Ch ấ ấ t t Nguyên liệuHồi lưu Nhiệt độ 0 C 118 118 Áp suất kg/cm 2 10,1 6,6 Lưu lượng mol kmol/h 925,7 3149,8 Lưu
Ngày tải lên: 16/12/2013, 13:15

Tài liệu Bài giảng Hệ Thống Điều Khiển Số P5 doc
... Hay các phương trình này có thể được vi t lại như sau: Vị trí tức thời của vector từ thông rotor được xác định như sau: Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T © B Chöông 5: ... [][ ] () babar i,i,u,u=Ψ dt di L LL dt d L L dt d s s m rs s s m r s r σ ψ −= Ψ Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T © B Chöông 5: Một số phương pháp ước lượng từ thông r...
Ngày tải lên: 17/12/2013, 13:15
Tài liệu Bài giảng Hệ Thống Điều Khiển Số P6 docx
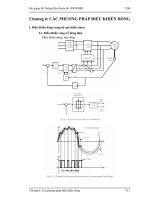
... Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B Chöông 6: Các phương pháp điều khiển dòng VI. 2 I.1. Điều khiển so sánh dòng điện Điều khiển dòng, tiếp áp Bài giảng Hệ Thống Điều ... Điều Khiển Số (ĐCKĐB) T©B Chöông 6: Các phương pháp điều khiển dòng VI. 3 II. Điều khiển dòng trong hệ qui chiếu từ thông rotor Điều khiển dòng (dq), t...
Ngày tải lên: 17/12/2013, 14:15