Bai dich bai bao Mô hình hóa Mô phỏng: Mô phỏng thời gian thực hệ điều khiển tự động Đối với hệ thống điện liên kết với nhau

Bai dich bai bao Mô hình hóa Mô phỏng: Mô phỏng thời gian thực hệ điều khiển tự động Đối với hệ thống điện liên kết với nhau
... thấy Mô hệ thống thực hành vi động quan sát so sánh i Thời gian điều khiển PI liên tục với thời gian mô hình hệ thống điện (liên tục hệ thống) ii Thời gian điều khiển PI rời rạc với hệ thống điện ... nhân liên kết với Đối với việc thực thời gian thực, điều khiển rời rạc hóa mã hóa để chạy thời gian thực hoạ...
Ngày tải lên: 28/06/2016, 11:13

Tìm hiểu logic mờ và xây dựng ứng dụng điều khiển tự động tốc độ xe ôtô
... thiệu Logic Mờ Phần II: Hệ Thống Mờ, áp dụng vào toán Điều khiển tốc độ xe ôtô Trong mục tiêu tiểu luận, giới hạn ứng dụng Logic mờ để điều khiển tốc độ xe ôtô để giúp người điều khiển xe an ... quát sở lý thuyết logic mờ, mệnh đề mờ, luật mờ, số mờ … • Áp dụng kiến thức logic mờ để xây dựng ứng dụng điều khiển mờ cho xe •...
Ngày tải lên: 08/11/2013, 02:43

Giáo trình hình thành ứng dụng cấu tạo kiểu xung trong việc điều khiển tự động hóa p1 pptx
... kế chuyên dụng cho điều khiển tự động trình công nghệ Trong hệ thống tự động PLC đợc coi nh não, xử lý toàn hoạt động hệ thống Với chơng trình nạp vào nhớ theo yêu cầu toán, PLC điều khiển giám ... PLC thể rõ u điểm vợt trội việc điều khiển tự động so với thiêt bị điều khiển khác 1.1.3 Giá trị kinh tế PLC Khi sử dụng phơng án thiết kế nói chung điều...
Ngày tải lên: 13/08/2014, 11:21

Giáo trình hình thành ứng dụng cấu tạo kiểu xung trong việc điều khiển tự động hóa p7 pot
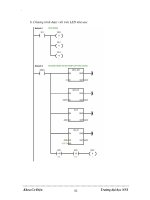
... mô hình Khoa Cơ Điện 70 Trờng đại học NNI Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Việc đóng cắt động đợc thực rơle thông qua chơng trình điều khiển PLC Sau mạch động lực mắc động đèn báo mô hình ... cụ thể thành bình chứa Tại vị trí ta đặt công tắc hành trình xác định tín hiệu tác động dùng tín hiệu để đóng nguồn vào cho đầu vào PLC để xử lý đặt định điều khiển đế...
Ngày tải lên: 13/08/2014, 11:21

Giáo trình hình thành ứng dụng cấu tạo kiểu xung trong việc điều khiển tự động hóa p8 docx
... TĐH46 Hình 3.11 Sơ đồ tạo nguồn cho cảm biến 3.4 Xây dựng thuật toán điều khiển mô hình Từ nguyên lý hoạt động mô hình khâu tinh lọc thựa tế đợc thay mô hình mô phỏng, đa sơ đồ thuật toán chơng trình ... chơng trình điều khiển SIMATIC S7 200 Để thuận tiện cho việc kiểm tra việc hiểu chơng trình ta tiến hành phân công tiến hiệu nh sau: TT ký hiệu nhiệm vụ tín hiệu...
Ngày tải lên: 13/08/2014, 11:21
Giáo trình hình thành ứng dụng cấu tạo kiểu xung trong việc điều khiển tự động hóa p9 pot
... cứu phơng pháp điều khiển lập trình plc 1.1 Những sở để lựa chọn PLC hệ thống điều khiển tự động 1.1.1.Vai trò plc 1.1.2 u điểm PLC việc điều khiển tự động hóa trình công nghệ ... sử dụng thiết bị điện tử việc xây dựng mô hình - Qua trình thực đề tài hiểu sâu PLC, đợc vận dụng vào thiết kế thực tế trực tiếp Biết cách sử dụng phần mềm lập trình để lập...
Ngày tải lên: 13/08/2014, 11:21

Bài tập lớn mô hình hóa: Cho sơ đồ cấu trúc của hệ điều khiển tự động. Hãy dùng máy tính để mô phỏng và khảo sát quá trình quá độ của hệ.
... khối Kết mô phỏng: Kết luận: Hệ cho ổn định theo thời gian.Kết khảo sát Matlab-Simulink hoàn toàn trùng với kết thu VB,chứng tỏ tính đắn phương pháp dùng để mô hình hóa hệ thống 8.Nhận dạng hệ thống ... cong độ Kết chạy chương trình hình sau: 6.Các tiêu chất lượng hệ Ymax=3.008523 Yod=1.984127 Độ chỉnh: 51.62954% Tmax=0.013s Tod=0.055s 7 .Dùng Matlab-Simuli...
Ngày tải lên: 21/01/2014, 16:21

bài tập lớn mô hình hóa dùng máy tính khảo sát quá trình quá độ của hệ thống điều khiển tự động
... đường cong trình độ 14 Tính in tiêu chất lượng hệ điều khiển tự động 7 .Dùng Matlab-Simulink khảo sát lại >> k1=30; >> k2=0.2; >> num=k1; >> dem=[1 k1*k2]; >> step(num,dem) 15 Nhận dạng hệ thống Từ ... cong trình độ ta nhận dạng hàm truyền 16 9.Thiết kế giao diện VB6.0 17 Tài liệu tham khảo [1] Bài giảng mô hình hóa hệ thống [2] Nguyễn Phùng Quang Ma...
Ngày tải lên: 24/04/2014, 13:09

BÀI tập lớn mô HÌNH hóa hệ THỐNG dùng máy tính khảo sát quá trình quá độ của hệ thống điều khiển tự động
... Kết mô maplatb 8.Nhận dạng hệ thống: Hàm truyền cho có đường cong trình độ giống với đồ thị phương trình sai phân tìm 9.Thiết kế giao diện: 10.Tài liệu tham khảo: [1] -Bài giảng mô hình hóa hệ thống ... 342386967190171 990 ) = 345503479200681 1000 ) = 348605235927608 5.Vẽ đường cong độ: 6 .Tính in tiêu chất lượng hệ điều khiển tự động: gia tri Ymax la: 34860...
Ngày tải lên: 24/04/2014, 19:39

Bài tập dài mô hình hoá số 1: dùng máy tính khảo sát quá trình quá độ của hệ điều khiển tự động
... học bkhn môn :tự động hoá Chương lập trình máy tính để khảo sát trình độ hệ điều khiển tự động Đề Bài: Tham số sinh viên tự chọn K1, K2 - hệ số khuếch đại T1 - số thời gian T2 - Hằng số thời gian ... bkhn môn :tự động hoá 2.4.In 100 giá trị 15 trường đại học bkhn môn :tự động hoá 16 trường đại học bkhn môn :tự động hoá 17 trường đại học...
Ngày tải lên: 22/08/2015, 22:23

Báo cáo "Mô hình hoá quá trình xử lý sinh học yếm khí - thiếu khí - hiếu khí đối với nước thải bệnh viện " pptx
Ngày tải lên: 11/03/2014, 20:20

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 1 doc
... thiết kế hệ thống điều khiển có chất vật lý khác Cơ sở toán học Quan hệ tín hiệu vào tín hiệu hệ thống tuyến tính bất biến liên tục mô tả phương trình vi phân tuyến tính hệ số hằng: r(t) Hệ thống ... biến liên tục c(t) d n c(t ) d n−1c(t ) dc(t ) d m r (t ) d m−1r (t ) dr (t ) + a1 + L + an 1 + an c(t ) = b0 a0 + b1 + L + bm 1 + bm r (t ) n n 1 m m 1 dt d...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 2 pdf
... lục sách Lý thuyết Điều khiển tự động 26 September 20 06 © H T Hồng - ÐHBK TPHCM 15 Đònh nghóa hàm truyền Xét hệ thống mô tả phương trình vi phân: r(t) Hệ thống tuyến tính bất biến liên tục c(t) ... truyền điều khiển (khâu hiệu chỉnh) Các khâu hiệu chỉnh thụ động (tt) C Mạch sớm pha: R1 R2 KC = R1 + R2 Mạch trể pha: R2 R2 R1C T= R1 + R2 R2 R1 C KC = 26 S...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 3 pps
... September 2006 − ω : tốc độ động − Mt : moment tải − B : hệ số ma sát − J : moment quán tính © H T Hồng - ÐHBK TPHCM 23 Hàm truyền đối tượng thường gặp (tt) Hàm truyền động DC (tt) Áp dụng đònh ... ⇔ G( s) = K Ts + M T= B © H T Hồng - ÐHBK TPHCM 29 Hàm truyền đối tượng thường gặp (tt) Hệ thống giảm xóc ô tô, xe máy M: khối lượng tác động lên bánh xe, B hệ số ma sát, K đ...
Ngày tải lên: 07/08/2014, 23:24

Bài giảng lý thuyết điều khiển tự động - Mô hình toán học, hệ thống điều khiển liên tục part 4 docx
... - ÐHBK TPHCM 32 Hàm truyền hệ thống tự động 26 September 2006 © H T Hồng - ÐHBK TPHCM 33 Đại số sơ đồ khối Sơ đồ khối Sơ đồ khối hệ thống hình vẽ mô tả chức phần tử tác động qua lại phần tử hệ ... hệ thống đơn giản (tt) Hệ thống song song n Gss ( s ) = ∑ Gi ( s ) i =1 26 September 2006 © H T Hồng - ÐHBK TPHCM 36 Đại số sơ đồ khối Hàm truyền hệ thống...
Ngày tải lên: 07/08/2014, 23:24