Giáo trình điều động tàu part 7 ppsx



Giáo trình Mạch điện tử part 7 ppsx
... - + vB o B RB i B R f 74 1 v B i B vB a B • Chương 7: OP-AMP_Khuếch đại và ứng dụng Bài 8: Cho mạch hình 7. 66 Chứng tỏ rằng: Bài 9: Cho mạch hình 7. 67 Chứng tỏ nếu vi là tín hiệu ... thế ngõ ra. Hình 7. 72 là mơ hình hóa đơn giản nhất của nhiễu trong op-amp (nguồn điện thế E n ). - + R f //R i E n =2 μ v R i R f 3pF 74 1 )1( i f no R R Ev += Hình 7. 72...
Ngày tải lên: 27/07/2014, 16:21

Giáo trình đa dạng động vật part 7 ppsx
... Hçnh 7. 7: Pháưn âáưu, nhçn màût lỉng ca Oli g ochaeta. Hçnh 7. 8: Màût càõt ngang ca Oligochaeta ( theo Woodruff ) . Hçnh 7. 9: Hãû tháưn kinh ca giun (theo Shi p le y v MacBride ) . Chỉång 7: Ngnh ... v näøi lãn Hçnh 7. 3: Màût càõt ngang ca mäüt âäút ca giun nhiãưu tå (theo Benham). Hçnh 7. 4: Cạc âäút sinh dủc hon thiãûn cạc pháưn cn thiãúu (theo Borradaile v Potts). Chỉång 7: Ng...
Ngày tải lên: 29/07/2014, 15:21
Tài liệu giáo trình truyền động điện , chương 7 pdf
... dq: Chương 7 Các phương pháp điều khiển động cơ xoay chiều hiện đại 7. 1 Cơ sở điều khiển động cơ xoay chiều hiện đại 7. 2 Véctơ không gian 7. 3 Hệ tọa độ trường và chuyển đổi giữa các hệ tọa độ 7. 4 Điều ... khiển động cơ một chiều kích từ độc lập 7. 5 Mô hình động cơ KĐB ở hệ tọa độ trường 7. 6 Mô hình động cơ Đồng bộ ở hệ tọa độ trường Phân loại các phương pháp đ...
Ngày tải lên: 24/12/2013, 04:16

Tài liệu Giáo trình ngôn ngữ C++ Part 7 docx
... Nhận xét: − while là cấu trúc điều khiển lặp với điều kiện trước, tức là điều kiện lặp được kiểm tra trước khi vào thân của vòng lặp, do vậy nếu biểu thức điều kiện có giá trị ‘sai’ ngay ... cấu trúc điều khiển khác. IV.4. Cấu trúc while while là cấu trúc điều khiển lặp thực hiện một lệnh hay khối lệnh nào đó với số lần lặp được xác định tuỳ theo một điều kiện (gọi là...
Ngày tải lên: 24/12/2013, 12:16

Giáo trình đo lường nhiệt part 7 ppt
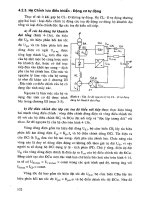
... II sẽ quay theo chiều tác động của P 1 và kéo theo bánh răng I chuyển động => bánh răng II là bánh chủ động còn bánh răng I là bị động. Nhiệm vụ chủ động và bị động của 2 bánh răng trên ... khi q ua thiết bị tiết lu, dựa vào p hơn g trình Bécnuli tìm đợc tốc độ trung bình dòng tại tiết diện đo. Xét tiết diện I và II ta có sự thay đổi động năng và thế năng : P = p1-...
Ngày tải lên: 20/06/2014, 05:20

