sơ đồ kết nối hệ thống camera

PhanII PHÂN TÍCH TỔNG QUÁT VÀ SƠ ĐỒ KHỐI CỦA HỆ THỐNG.doc
... logic số Phần II: Thiết kế phần cứng Chơng 1: Phân tích tổng quát và sơ đồ khối của hệ thống I. Sơ l ợc hoạt động của toàn bộ hệ thống Mạch hoạt động dựa trên nguyên tắc mạch điều khiển màn hình ... động hệ thống. Đệm dữ liệu (74LS245) và chốt địa chỉ ( 74LS373 ) dùng để tách kênh địa chỉ và dữ liệu b, Khối nguồn tạo điện áp 1 chiều 12V và 5V cung cấp cho toàn bộ hệ thống ,đợc kết nối ... hàng đa dữ liều vào II. Sơ đồ nguyên lý và chức năng của các khối 1. Khối điều khiển a, kết nối máy tính Việc điều khiển ghi, đọc dữ liệu đợc thực hiện bởi máy tính ghép nối qua cổng song song...
Ngày tải lên: 25/08/2012, 10:15

Kết nối hệ thống EGSB - Bùn hoạt tính - Lọc để xử lý nước thải dệt nhuộm
Ngày tải lên: 08/11/2012, 10:31
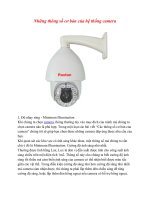
Những thông số cơ bản của hệ thống camera
... Những thông số cơ bản của hệ thống camera 1, Độ nhạy sáng - Minimum Illumination Khi chúng ta chọn camera, thông thường tùy vào mục đích của mình mà chúng ta chọn camera nào là phù hợp. Trong ... thúc đẩy cho dòng camera độ nét cao (hay còn gọi Camera Megapixel) có cơ hội phát triển mạnh mẽ. Với những hệ thống giám sát quan trọng cần hình ảnh rõ nét thì lựa chọn các camera độ nét cao ... có thể quan sát được. 2, Bảng thông số quy đổi góc mở của ống kính Khi chúng ta thiết kế một hệ thống camera giám sát, việc chọn ống kính rất quan trọng. Việc chọn ống kính quyết định đến vùng...
Ngày tải lên: 23/03/2013, 08:52

sơ đồ công nghệ hệ thống xử lý nước thải công ty giấy tân Mai
Ngày tải lên: 24/04/2013, 17:06









Chương II: HÀM CHUYỂN VÀ SƠ ĐỒ KHỐI CỦA HỆ THỐNG
... hàm chuyển của hệ thống trong sơ đồ khối sau đây rồi đặc H 1 =1/G 1 ; H =1/G 2 . II.15 : 2 Hàm Chuyển Sơ Đồ Khối Của Hệ Thống Xác định C/R cho mỗi hệ sau đây : ... Hàm Chuyển Sơ Đồ Khối Của Hệ Thống Trang II.10 H.2_5b được dùng nhiều vì đơn giản. Sự nhiều input và output được biểu diễn bằng vector . H.2_6 chỉ sơ đồ khối dạng chính tắc của hệ thống đa ... t ) dt = d Hệ thống Cơ Sở Tự Động Học Phạm Văn Tấn Chương II Hàm Chuyển Sơ Đồ Khối Của Hệ Thống Trang II.20 ậy: . Bây giờ, bỏ qua C 1 . Xét hệ thống với 2 input R 1 ,R 2 ...
Ngày tải lên: 28/10/2013, 10:15

Một sơ đồ điều khiển hệ thống Hand-eye Rô-bốt bám mục tiêu di động sử dụng mạng nơ-ron
... zKzK dP & −−= ω (17) Ta có được sơ đồ điều khiển như trong hình 2, các ma trận dp KK , chọn là các ma trận hệ số xác định dương. Hình 2: Sơ đồ hệ thống điều khiển hand-eye ... Ψ ( θ ) ( ω + φ ) + ψ ),( θθ & (23) Hình 3: Sơ đồ hệ thống điều khiển tay máy gắn camera có sử dụng mạng nơ ron. K K Ψ ˆ Tay máy gắn Camera γ ˆ )(t θ & )(t θ )(tz )1( −tz )2( ... là tốc độ cập nhật trọng và α là hệ số của thành phần momentum. Hình 4: Sơ đồ mạng nơ-ron hai lớp sử dụng trong hệ điều khiển hand-eye rô-bốt 3. KẾT LUẬN. Những nghiên cứu cho thấy...
Ngày tải lên: 04/11/2013, 12:15

Bạn có muốn tìm thêm với từ khóa: