dieu khien tu dong hoa robot

Lý thuyết điều khiển tự động hóa quá trình nhiệt
... W V1 (S) = K V1 và W V2 (S) = K V2 trong đó K V1 và K V2 được xác định bằng hệ số góc tiếp tuyến tại giá trị ứng với độ mở của van trên đồ thị đặc tính của các van tương ứng. Bài...
Ngày tải lên: 29/10/2012, 14:50


Tài liệu Bài 2: Điều khiển tự động hóa - hôm nay và ngày mai pdf
... Trong hai thập kỷ cuối, nhiều nhánh mới về điều khiển cũng đã hình thành, đó là: thích nghi, phi tuyến, hổn hợp, mờ và neural. Ngày nay, khi nói đến điều khiển là phải nhắc đến 4 thuật ngữ quan ... giao thông vận tải Truyền thông và mạng Sinh học và y học Vật liệu và chế biến Kỹ thuật robot và máy thông minh Kết luận Với những thành tựu đã đạt được và với những định hướng đúng trong ... ngột. 4. Hướng nghi ên cứu Tăng những nghiên cứu mang tính chất tích hợp các lĩnh vực: Điều khiển, khoa học máy tính, truyền thông và mạng. Phải tìm ra được các nguyên lý, phương pháp và công cụ...
Ngày tải lên: 23/12/2013, 16:16

Thiết kế hệ thống điều khiển tự động hóa quá trình sấy tinh bột trong dây chuyền sản xuất tinh bột sắn
... và I 1 . -Nhiệt độ tác nhân sấy xác định bởi nhiệt kế (khi thiết kế, nhiệt độ này đợc lựa chọn tu thuộc vào yêu cầu công nghệ sấy) -Độ ẩm của tác nhân sấy ( 1 ) đợc xác định theo quan hệ đại ... xuất). Do vậy những nhận xét đánh giá sau đợt khảo sát chỉ nên xem là những thành công bớc đầu , tuy nhiờn õy vn có thể được xem/coi như có tính chất để tham kho rt hu ớch . Để có thể phổ biến ... cân bằng ẩm (cân bằng vật chất của quá trình sấy) nh sơ đồ nguyên lý trình bày tại hình 3.4. và tu n theo đặc tính điều chỉnh trình bày ở hình 3.7. Yêu cầu phạm vi điều chỉnh là t TĐ 2 0 C...
Ngày tải lên: 18/04/2014, 06:49



Nghiên cứu ứng dụng bộ điều khiển tự động hoá có khả năng lập trình cho các hệ thống điều khiển công nghệ
... SÁCH CÁN BỘ KHOA HỌC CHÍNH THAM GIA THỰC HIỆN ĐỀ TÀI STT Họ và tên Học hàm, học vị, chuyên môn Cơ quan công tác 1. Nguyễn Thế Truyện TS, ĐTVT Viện NC ĐT, TH, TĐH 2. Lê Anh Tu n ThS, ... dụng Web Brower để mở đường link đến ứng dụng để điều khiển hay xem các dữ liệu khi ứng dụng chạy tu theo quyền truy cập của người sử dụng vào các phần của ứng dụng. Các công cụ cho phép biểu ... thể được biểu diễn dưới dạng đồ thị 2D, 3D hoặc bảng biểu hay đơn giản bằng sự thay đổi màu sắc tu theo ý thích của người sử dụng. Một số modul và công cụ trong LabVIEW Để mở rộng chức năng...
Ngày tải lên: 15/05/2014, 10:35

Điều khiển tự động xe robot
... loại vi maïch sau:2708 (1Kx8), 2716 (2Kx8), 2732 (4Kx8), 2764 (8Kx8) … với T ac = 250_ 450 ns tu theo loại EPROM cụ thể. Số đường địa chỉ thay đổi tùy thuộc vào dung lượng của mỗi loại EPROM, ... định địa chỉ được dùng như sau: - Thanh ghi. - Trực tiếp. - Gián tiếp. - Tức thời. - Tương đối. - Tuyệt đối. - Dài. - Chỉ số. 2. Các loại lệnh của 8051: Các lệnh của 8051 được chia làm 5 nhóm: - ... một vài trong số các thanh ghi đặc biệt nói trên: - Từ trạng thái chương trình (PSW: Program Status Word) - Thanh ghi B. - Con troû stack (Stack Pointer). - Con trỏ dữ liệu DPTR (Data Pointer). -...
Ngày tải lên: 22/05/2014, 18:24

Nghiên cứu, thiết kế hệ thống điều khiển tự động hóa cho dây chuyền xi măng lò quay công suất 2.500 t clanke/ngày
... Bộ Khoa học Công nghệ, Bộ Công Thương, Tổng Công ty LILAMA, Viện Nghiên Cứu Cơ Khí cùng với các chuyên gia, các nhà khoa học trong và ngoài Viện đã giúp đỡ chúng tôi hoàn thành nhiệm vụ. Tuy ... thi Giống gia súc Chương trình máy tính X 2. Yêu cầu khoa học đối với sản phẩm tạo ra (dạng kết quả II, III) TT Tên sản phẩm Yêu cầu khoa học Chú thích 1 2 3 4 1 Báo cáo và số liệu của việc ... tự động hóa ngày nay là cung cấp giải pháp dịch vụ trên nền tảng thiết bị của các hãng có tên tu i. Vì vậy, đề tài này cũng không đầu tư nghiên cứu chế tạo phầ n cứng của các thiết bị điều...
Ngày tải lên: 23/05/2014, 16:55

Đồ án tốt nghiệp- thiết kế bộ điều khiển tự động cho robot tự hành
... nh mắt của Robot tự hành. Nhiệm vụ của nó là giúp cho Robot tự hành dò đờng và tìm đờng đi trên lới tọa độ. Mặt khác nó còn phải xác định góc lệch hiện tại của Robot, vị trí lệch của Robot so với ... kế bộ điều khiển chuyển động theo quỹ đạo cho Robot tự hành Phần I Phân tích cấu trúc tổng quát của Robot tự hành Về cấu trúc, có thể phân chia robot tự hành thành các khối cơ bản sau: - Hệ quang ... kế bộ điều khiển chuyển động theo quỹ đạo cho Robot tự hành Lời nói đầu ROBOCON là cuộc thi trí tu và sáng tạo đợc phát động hàng năm do hiệp hội ROBOT Châu á Thái Bình Dơng tổ chức. Cuộc thi...
Ngày tải lên: 06/06/2014, 09:49
Giáo trình phân tích khả năng ứng dụng conector trong việc điều khiển tự động hóa p10 potx
... Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 84 . Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 82 b. Chơng trình ... . Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 83 . Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 90 Trang lời nói đầu ... . Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 85 . Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 87 Hình 3.13. Sơ...
Ngày tải lên: 21/07/2014, 22:22

Giáo trình phân tích khả năng ứng dụng conector trong việc điều khiển tự động hóa p9 pot
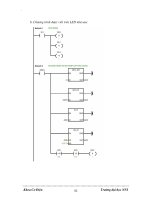
... đợc viết trên STL nh− sau: NETWORK 1 //KHOI DONG LD I0.0 S Q0.0, 1 S Q0.1, 1 R Q1.0, 1 . Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 73 Hình 3.10. ... Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 78 3.5. Viết chơng trình điều khiển 3.5.1. Phân công tín hiệu vào ... chọn C1=2200 mF với điện áp nạp là 25V. . Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 80 NETWORK 8 //SO SANH MUC CAN BINH 1 LDW>= T37, +18000 R Q0.4,...
Ngày tải lên: 21/07/2014, 22:22

Giáo trình phân tích khả năng ứng dụng conector trong việc điều khiển tự động hóa p8 doc
... Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 64 * Trong phơng pháp điện thì ta phải sử dụng đến các cảm biến ... phao b/ Cảm biến hình trụ treo p 0 k . Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 71 Việc đóng cắt động cơ đợc thực hiện bằng các rơle thông qua chơng ... l y tâm Các đèn báo g ia nhiệt sản p hẩm . Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 67 Hình 3.6. Lu đồ phân bố thời gian tạo tín hiệu mức thay thế...
Ngày tải lên: 21/07/2014, 22:22

Giáo trình phân tích khả năng ứng dụng conector trong việc điều khiển tự động hóa p7 pdf
... Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 58 Dựa vào đặc tính rất nhạy của các bán dẫn với nhiệt độ, tạo ra điện áp hoặc dòng điện, tỷ lệ thuận với nhiệt độ tuyệt đối. Đo tín hiệu ... V 1 ) . R 5 /(R 3 + R 5 ) – V 1 V1 V2 V0 VR1 . Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 59 + Sơ chân nối của nó nh sau: Sơ đồ nhìn từ dới chân thiết ... ở nhiệt độ 25 0 C nó có sai số không quá 1%. Với khoảng đo từ 0 0 C 128 0 C, tín hiệu ngõ ra tuyến tính liên tục với những thay đổi của tín hiệu ngõ vào. - Thông số kỹ thuật: + Tiêu tán...
Ngày tải lên: 21/07/2014, 22:22

Giáo trình phân tích khả năng ứng dụng conector trong việc điều khiển tự động hóa p6 pot
... Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 46 bơm chất lỏng. Khi lu lợng sản phẩm trong thùng bằng 1/3 thùng ... sơ đồ 2.4 Gia nhiÖt Thïng chøa 2 . Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 54 c. Decanter Thùng chứa 2: Dịch quả từ thùng chứa 1 đợc bơm bởi ... Nhiệt độ Cảm biến PLC Mạch điều khiển rơle . Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 48 + Dịch quả đi từ dới lên Trong giai đoạn này yêu cầu lu lợng...
Ngày tải lên: 21/07/2014, 22:22

Giáo trình phân tích khả năng ứng dụng conector trong việc điều khiển tự động hóa p5 pdf
... Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 37 quản lý thông tin, văn th lu trữ, phục vụ phơng tiện đi lại của ... mình, để sản xuất trên mảnh đất đầy tiềm năng . Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 44 đa vào máy ép. Phần vỏ và bà ép lần một đợc đa vào lần trích ép ... sơ đồ 2.3 Bån chøa 300lit Gia nhiÖt . Báo cáo tốt nghiệp Đinh Văn Hùng - TĐH46 Khoa Cơ Điện Trờng đại học NNI 43 đợc đổ vào trong bồn. Dứa đợc ngâm đầy nớc và một guồng khuấy...
Ngày tải lên: 21/07/2014, 22:22

Giáo trình phân tích khả năng ứng dụng conector trong việc điều khiển tự động hóa p4 pot
Ngày tải lên: 21/07/2014, 22:22

Giáo trình phân tích khả năng ứng dụng conector trong việc điều khiển tự động hóa p3 pps
Ngày tải lên: 21/07/2014, 22:22

Giáo trình phân tích khả năng ứng dụng conector trong việc điều khiển tự động hóa p2 doc
Ngày tải lên: 21/07/2014, 22:22

Giáo trình phân tích khả năng ứng dụng conector trong việc điều khiển tự động hóa p1 docx
Ngày tải lên: 21/07/2014, 22:22
Bạn có muốn tìm thêm với từ khóa: