Negotiations 6e mcgraw hill chapter 7

mcgraw hill s essential american slang phần 7 pdf
... BETTER: She will show us how to it He becomes self-conscious to the extent that he withdraws into himself BETTER: He becomes so self-conscious that he withdraws into himself Pointlessness Pointless ... many words to say something; and pointlessness, saying something that doesn't need to be said at all Circumlocution > Avoid Meaningless" Strings of Verbs English often conveys subtleties by str...
Ngày tải lên: 24/07/2014, 12:22
TE AM FL Y .Photoshop 7 ® Laurie McCanna McGraw-Hill/Osborne New York Chicago San Francisco ppt
... CHAPTER 71 72 72 75 75 76 76 77 78 78 78 78 78 78 78 79 81 82 82 83 83 84 84 85 86 87 87 88 88 89 Acquiring Images 91 Targeting your Image Size and ... Layer visibility icon Layers palette menu Layer preview Layer name Create a new fill/adjustment layer Create a new set Delete layer Add a layer style Add layer mask FIGURE 2-1 Create a new layer ... ways to add layers...
Ngày tải lên: 02/08/2014, 02:20

(McGraw-Hill) (Instructors Manual) Electric Machinery Fundamentals 4th Edition Episode 1 Part 7 doc
... MW = (1. 5) 61. 0 − f sys + (1. 676 ) 61. 5 − f sys + (1. 9 61) 60.5 − f sys ) MW = 91. 5 − 1. 5f sys + 10 3. 07 − 1. 676 f sys + 11 8.64 − 1. 961f sys 5 .13 7 fsys = 306.2 f sys = 59. 61 Hz The power supplied by ... SD B 3.0 +1 +1 100 10 0 f nl,C 60.5 Hz f fl,C = = = 58. 97 Hz SDC 2.6 +1 +1 100 10 0 and the slopes of the power-frequency curves are: MW S PA = = 1. 5 MW/Hz Hz...
Ngày tải lên: 05/08/2014, 20:22

(McGraw-Hill) (Instructors Manual) Electric Machinery Fundamentals 4th Edition Episode 2 Part 7 ppt
... cha6 523 9_ch09.qxd 630 11/14/03 10:10 AM Page 630 ELECTRIC MACHINERY FUNDAMENTALS IA RA + RS IL Nse = 20 turns + 0 .21 LS IF Radj + – EA RF 20 LF VT NF = 1000 turns – FIGURE ... 50 kVA at 0.8 PF lagging to the ac power system cha6 523 9_ch10.qxd 680 11/14/03 12: 41 PM Page 680 ELECTRIC MACHINERY FUNDAMENTALS 10–6 10 7 10–8 10–9 10–10 (f) Pout (g) ind (h) load (i) Efficiency...
Ngày tải lên: 05/08/2014, 20:22

McGraw.Hill PIC Robotics A Beginners Guide to Robotics Projects Using the PIC Micro eBook-LiB Part 7 pps
... Fudge Factor The variable RV (range value) is the fudge factor At the beginning of the pro gram the variable RV is assigned a value of 10 In my prototype I actually used an RV of 2 because I had matched the resistance values of CdS cells, ... for this robot that matches, as best as one can match them, in resistance Since the resistance value of the CdS cells can vary so greatly,...
Ngày tải lên: 10/08/2014, 04:22
McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 7 pot
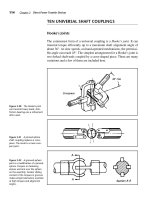
... instruments, and other light-duty mechanisms For heavy duty, such as the front-wheel drives of Figure 3-2 4 A constant-velocity joint is made by coupling two Hooke’s joints They must have equal input and ... from one-wheeled vehicles to eightwheeled vehicles It is divided into four sections: vehicles with one to three wheels and four-wheeled diamond layouts, four- and five-wheeled...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - The Robot Builder''''s Bonanza Part 7 pot
... design in either of two ways: I Reduce the height of the robot to better match the area of the base, or I Increase the area of the base to compensate for the height of the robot (There is also ... I The 78 H05K offers a 5-volt output at 5A I The 78 H12K offers a 12-volt output at 5A I The 78 P05K delivers volts at 10 amps SWITCHING VOLTAGE REGULATION All of the...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - The Robot Builder''''s Bonanza Episode 2 Part 7 potx
... +5V 11 IN0 Vcc 26 27 IN1 28 IN2 IN3 IN4 IN5 IN6 IN7 Analog Inputs (8) A 12 22 OE +Rf Ale 25 24 Input Select 23 Start Conversion 500kHz In 10 Q7 Q6 Q5 Q4 Q3 Q2 Q1 Q0 A1 Eoc A2 21 MSB 20 19 18 Digital ... and circuit recommendations for the HT-12D chip There are five important outputs for the HT-12D: the four data lines (pins 1 0-1 3) and the valid data line (pin 17) The v...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill- PDA Robotics Part 7 ppt
... Drilling the main board 113 PDA Robotics Figure 6 .7 Dead center drill Figure 6.8 Cut the boards on the dotted lines 114 Chapter / Building PDA Robot Parts Lists The Main Board Parts for the main board ... in PDA Robot Pins 10 and 12 are connected to Port B pins on the PIC16F 876 that have been configured through the C code as outputs (see Chapter 7: Programming the PIC16F 876 Micro...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill- PDA Robotics - Using Your PDA to Control Your Robot 1 Part 7 ppsx
... connector with key • One Red LED • Three K resistor • Two 47R 1/ 4 W resistors • One 4 .7 UF tantalum capacitor • Six 22 pF capacitors • One 1- pin • 8" of six-wire ribbon cable The Motor Controller Parts ... (3.9 mm) wire connector L7805ACV voltage regulator 22 pF capacitors K resistors Red LED 47R 1/ 4 W resistors 4 .7 UF tantalum capacitor Figure 6.9 Main board parts placement 11 7...
Ngày tải lên: 10/08/2014, 04:23

McGraw-Hill PDA Robotics 2003 (By.Laxxuss) Part 7 pptx
... 475 ml bottle cat #418 developer • One 475 ml bottle cat #415 ferric chloride • Two cat #416-S foam brushes 1 07 Copyright 2003 by The McGraw-Hill Companies, Inc Click Here for Terms of Use PDA ... Drilling the main board 113 PDA Robotics Figure 6 .7 Dead center drill Figure 6.8 Cut the boards on the dotted lines 114 Chapter / Building PDA Robot Parts Lists The Main Board Parts...
Ngày tải lên: 10/08/2014, 04:23

McGraw-Hill Build a Remote Controlled Robot Part 7 pps
... construction and installation of the robot s arms, drink dispenser, and head ARMS Questor’s arms are very simple to make and install; however, care should be taken when fabricating them because errors ... corner braces available at any hardware store These are bolted in place at the lower part of the robot s upper framework where the four bolts holding the two connecting pieces of the fra...
Ngày tải lên: 10/08/2014, 05:20

McGraw-Hill Machining and Metalworking Handbook 3rd ed - R. Walsh_ D. Cormier (McGraw-Hill_ 2006) Episode 7 doc
... 0. 070 9 0. 070 0 69 65 79 0.00 17 0.00 17 0.00 17 0. 071 7 0. 072 6 0. 071 7 62 58 70 3–48 1.80 mm 49 48 0. 070 9 0. 073 0 0. 076 0 74 64 85 0.00 17 0.00 17 0.0019 0. 072 6 0. 074 7 0. 077 9 66 56 78 ⁄64 47 2.00 mm 0. 078 1 ... 0. 370 1 77 75 73 0.0046 0.0046 0.0046 0. 370 7 0. 372 6 0. 374 7 72 70 68 W ⁄64 10.50 mm 0.3860 0.3906 0.4134 79 72 87 0.0046 0.0046 0.00 47 0.390...
Ngày tải lên: 13/08/2014, 05:21

Mcgraw Hill, Dictionary Of Engineering (2003) Episode 7 pps
... degree of the failure of a powder { falиyər prapиərdиez } ¨ ¯ ¯ failure rate [ENG] The probability of failure per unit of time of items in operation; sometimes estimated as a ratio of the number of ... measure of the resistance of a beam of specified material and cross section to bending, equal to the product of Young’s modulus for the material and the square of the ra...
Ngày tải lên: 13/08/2014, 09:21

mcgraw hill wireless data demystified phần 7 docx
... columns or tables and wireless data distribution to a database with schema differences Rule-Based Wireless Data Sharing Allocating wireless data among users streamlines data flows and minimizes ... any wireless data and mobile application that makes modifications to the database These possible sources include the client wireless data and mobile application, overnight fee...
Ngày tải lên: 14/08/2014, 17:21
- internet and web technologies by rajkamal tata mcgraw hill
- lord of the flies chapter 7 summary
- chapter 7 mos fieldeffecttransistors
- lord of the flies chapter 78 summary
- succeeding in the world of work chapter 7
- php a beginners guide mcgraw hill professional
- chapter 7 the discrete fourier transform its properties and applications
- lord of the flies chapter 7 8 9 summary
- lord of the flies chapter 79 summary