Robot Learning 2010 Part 11 pps

Robot Learning 2010 Part 11 pps
... capacity of robots that belong to multi -robot systems was devoted exclusively to high level functions they have to perform due to being a member of such system. However, each robot must have ... (2006). Mission Reliability Estimation for Multirobot Team Design. IEEE International Conference on Intelligent Robots and Systems, 2206 2 211 Sunan, H., Kok T., Tong L. (2002). Applied Pre...
Ngày tải lên: 11/08/2014, 23:22

Multi-Robot Systems Trends and Development 2010 Part 11 ppsx
... Multi -Robot Systems, Trends and Development 402 11 1 2 22 11 3 22 2 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ − ⎢ ⎥ ⎣ ⎦ Then the states of the system can be represented as 13131313 000 001 010 011 100 101 110 111 44444444 +−−++−− ... m_nArrivedRobotNum1; // arriveded robot number of I int m_nArrivedRobotNum2; // arriveded robot number of II int m_nArrivedRobotNum3; // arriveded robot number o...
Ngày tải lên: 12/08/2014, 02:23

Tự học powerpoint 2010 part 11 ppsx
... .chng tt c tp tin nh. Định dạng tập tin âm thanh dùng cho PowerPoint 2010 PowerPoint m rng kh tr nhinh dc kia. ... ng n Trang 103 Thit ln s dng 11. ...
Ngày tải lên: 02/07/2014, 21:20
Advanced Engineering Dynamics 2010 Part 11 pps
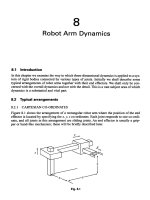
... dynamics is a substantial and vital part. 8.2 Typical arrangements 8.2.1 CARTESIAN CO-ORDINATES Figure 8.1 shows the arrangement of a rectangular robot arm where the position of the ... order of multiplication. This overall transformation matrix is often called the A matrix. In 111 we have 1 o o o ce, -se, o o lOOa, 10 0 0 0 1 0 0 SO, C8, 0 0 0 1 0...
Ngày tải lên: 10/08/2014, 20:20

Coatings Technology Handbook 2010 Part 11 ppsx
... agglomerated particles that are present in all pigments in their normal form after their manufacture. Dispersion is not considered to be a process of pulverization but rather a process of particle ... 2005 12:18 PM © 2006 by Taylor & Francis Group, LLC Pigment Definition • Pigment Particles Pigment Wetting • Particle Deaggregation and Surface Energy and Surface Area • Surface Energy and P...
Ngày tải lên: 10/08/2014, 20:20

Mechanics of Materials 2010 Part 11 pps
... = c 0 + c 1 E 11 + c 2 E 22 + c 3 E 33 +2c 4 E 23 +2c 5 E 31 +2c 6 E 12 + 1 2 c 111 1 E 2 11 + c 112 2 E 11 E 22 + c 113 3 E 11 E 33 +2c 112 3 E 11 E 23 +2c 113 1 E 11 E 31 +2c 111 2 E 11 E 12 + 1 2 c 2222 E 2 22 + ... Eq. 18.29 to the quadratic expression of W and obtain for instance T 12 = ∂W ∂E 12 =2c 6 + c 111 2 E 11 + c 2212 E 22 + c 3312 E 33 + c 1212 E 12 + c 122...
Ngày tải lên: 11/08/2014, 15:21

Robot Arms 2010 Part 11 pptx
... the application and is called icon identification algorithm (IIA). Robot Arms 202 in the case of mobile robots, the robot itself. In this chapter we present the design and implementation ... in 3D a simulated tele- echography robot handling a bright green probe and which end-effector orientation is controllable by the computer mouse (fig. 9b). The Robot Simulator has been buil...
Ngày tải lên: 11/08/2014, 23:22

Robot Learning 2010 Part 1 pdf
... publication@sciyo.com Robot Learning, Edited by Dr. Suraiya Jabin p. cm. ISBN 978-953-307-104-6 Robot Learning using Learning Classifier Systems Approach 5 psychological theory of learning called ... www.sciyo.com Robot Learning edited by Dr. Suraiya Jabin SC I YO 1 Robot Learning using Learning Classifier Systems Approach Suraiya Jabin Jamia Millia Islamia, Cen...
Ngày tải lên: 11/08/2014, 23:22

Robot Learning 2010 Part 2 doc
... intelligent robot that can successfully perform assigned tasks. Fig. 3. Conceptual framework of components for intelligent robot design. Robot Learning 10 interactive EC applied to robotics, ... largely theoretical. 5.3 Interactive classifier system for real robot learning Reinforcement learning has been applied to robot learning in a real environment (Uchibe e...
Ngày tải lên: 11/08/2014, 23:22

Robot Learning 2010 Part 4 docx
... Mokhov, S. A. (2010b). L’approche MARF à DEFT 2010: A MARF approach to DEFT 2010, Proceedings of TALN’10. To appear in DEFT 2010 System competition at TALN 2010. Mokhov, S. A. & Debbabi, M. (2008). ... & Mokhov, S. A. (2010) . Towards autonomic specification of Distributed MARF with ASSL: Self-healing, Proceedings of SERA 2010, Vol. 296 of SCI, Springer, pp. 1– 15. Robot...
Ngày tải lên: 11/08/2014, 23:22
- thiết kế bài giảng sinh học 11 nâng cao tập 1 part 1 ppsx
- thiết kế bài giảng sinh học 11 nâng cao tập 2 part 6 pps
- thiết kế bài giảng sinh học 11 nâng cao tập 1 part 6 pps
- toefl cbt book part 11
- writing template book part 11
- teaching academic esl writing part 11
- 963 bài essays mẫu part 11
- toefl stucture bank part 11
- toefl ibt listening e part 11