Advanced Engineering Dynamics 2010 Part 13 docx
Advanced Engineering Dynamics 2010 Part 13 docx
... The speed of the particle relative to the fixed frame will be u = J(uf + us. + uf) (9.79) so that 2 2 -1’2 y=(l - u/c) for a frame of reference moving with the particle. The proper ... If we now consider a group of particles then the four-momentum will be T (0 = Cm,y,(c 11, 4 UJI It is convenient to write this four-vector matrix in a partitioned form such as (0 =...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 6 docx
... longer. The result of the integration is )] (5.55) 131 2 [ eJ(e2 - 1)sinO -ln( J(e + I) + {(e - 1)tan(6/2) t= JK($ - 1131 2 1 + e cos 8 J(e + 1) - {(e - l)tan(6/2) ... conditions when o = oo. Thus 1 12 Dynamics of vehicles (5.96) 1 2 where C, is the drag coeficient. The drag coefficient is the sum of two parts, the first being the sum o...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 8 docx
... approximation can be made Constant force applied to a long bar 137 Now let the bar be of finite length L, as shown in Fig. 6 .13. At x = L the strain has to be zero. Therefore at ... (6.43) (n + 1)X nX +-I EA v=c ( EA CX EA - (2n + 1) PAE Fig. 6 .13 Impact of two bars 135 v z,/z, (ZJZ, - 1) c2 (1 + Z,/Z,) (Z,/Z, + 1) F', = -...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 1 pdf
... Advanced Engineering Dynamics H. R. Harrison Formerly Department of Mechanical Engineering & Aeronautics City University London T. Nettleton Formerly Department of Mechanical Engineering ... 83 85 85 85 88 90 93 100 103 106 107 107 109 1 I8 125 125 125 128 130 132 133 136 138 141 145 149 2 Newtonian mechanics Newton acknowledged the c...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 2 doc
... a group of particles 15 1 .13 Newton's laws for a group of particles Consider a group of n particles, three of which are shown in Fig. 1.1 1, where the ith parti- cle has ... on the particle is the vector sum of the forces due to each other particle in the group and the resultant of the external forces. If & is the force on particle i due to particle ....
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 3 ppt
... then the time integral will be integrated by Parts because 6u = 0 at t, and t2. The second term in equation (3.18) is Integrating by parts gives (3.19) 50 Hamilton S principle ... integrating by parts, h 6x 1; - It:mi 6x dt - kx 6x dt = 0 4 (3.10) Rotating fiame of reference and velocity-dependent potentials 37 It is interesting to note that for a charged par...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 4 pot
... for the veloc- ity of the point cb as +- -+ a x (ocb) = a x (ocb) 13 < (12 = 1, I Fig. 4.11 13C (I, = I,) Torque-free motion of a rigid body 67 If principal axes ... 13w,k (4.59) and 2T = I,o: + I,of + Z303 (4.60) Also o = o,i + o,j + ozk (4.61) The angle between the moment of momentum vector and the z axis, p, can be found from 130...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 5 pdf
... mgh cos8 (4.89) 2 21, sin2 0 213 Equation (4.89) can be rearranged in the following form 1 2 E’ = - z,e2 + v (e) where the constant P: 213 E’ = E - - is the effective ... air or in space. The pur- pose of the chapter is to bring out some of the characteristic dynamics in the particular domain. Satellite motion is typified by the motion of a small body about...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 9 potx
... exponen- tially, (6 .135 ) U" = U(- 1)" e" e-Kn Substituting equation (6 .135 ) into equation (6 .130 ) leads to o = 2J (dm) cosh (k'/2) (6 .136 ) for o > oca. ... motion is S(U,+~ - u,) - s(u, - n,-,) = mu, (6 .130 ) Let us assume (6 .13 1) Substituting equation (6 .13 1) into equation (6 .130 ) and dividing through by the common...
Ngày tải lên: 10/08/2014, 20:20
Advanced Engineering Dynamics 2010 Part 11 pps
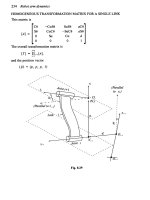
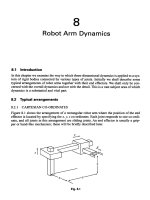
... CB, -S0, 0 a,C0, C8, -SO3 0 &e3 *[A13 = [ i' c: ! a37 ] The overall transformation matrix is o[A13 = o[A]i ~[Alz z[A13 The elements of this matrix are A,, = ... shall only be con- cerned with the overall dynamics and not with the detail. This is a vast subject area of which dynamics is a substantial and vital part. 8.2 Typical arrangements 8.2.1...
Ngày tải lên: 10/08/2014, 20:20