Advanced Engineering Dynamics 2010 Part 12 pdf

Advanced Engineering Dynamics 2010 Part 12 pdf
... Fig. 8.26) is T = - m,(a6)’ + 124 + m3[(d3 - b),g + ai] + 13% 2 l{ .,I For qi = 8, aT = [rn2a2 + 1, + I~ + m,[(d3 - b12]i2 8% - = [rn, + I* + I, + ... The inertia matrix for link 2 is 0 0 [J12 = () I 0 similarly for link 3 0 0 8.8 4 0 0 4.9 -3 4 20 :I -3 10 Ej 2 14 Robot ann dynamics A14 = a, COS O4 + d6 COS ....
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 1 pdf
... Advanced Engineering Dynamics H. R. Harrison Formerly Department of Mechanical Engineering & Aeronautics City University London T. Nettleton Formerly Department of Mechanical Engineering ... dynamics or hydrodynamics or aerodynamics and is not covered in this book. The object of this book is to form a bridge between elementary dynamics and advanced special...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 5 pdf
... (5.15) o = 1 ~(m,r~w) = z 1 g(m2r:w) rl Substituting equation (5 .12) into equation (5.14) gives lF121 = p2s + CLj: (5.16) Now 2 2 L, = mlrl o + m2r2m 76 Rigid ... air or in space. The pur- pose of the chapter is to bring out some of the characteristic dynamics in the particular domain. Satellite motion is typified by the motion of a small body about a larg...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 2 doc
... a group of particles 15 1.13 Newton's laws for a group of particles Consider a group of n particles, three of which are shown in Fig. 1.1 1, where the ith parti- cle has ... on the particle is the vector sum of the forces due to each other particle in the group and the resultant of the external forces. If & is the force on particle i due to particle ......
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 3 ppt
... then the kinetic energy of the body for motion relative to the centre of mass T, is 121 212 2 2 TG = -40, + -i-Zvo.v + -AmZ , see section 4.5 48 Hamilton 's principle ... the first term in the integral by parts gives By the definition of q the first term vanishes on account of q being zero at t, and at t2, so P 12 Now q is an arbitrary fimc...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 4 pot
... and 4 .12. Letting the precession rate about the Lo axis be CI we can write expressions for the veloc- ity of the point cb as +- -+ a x (ocb) = a x (ocb) 13 < (12 = 1, ... greatest the inside of the body cone rolls on the outside of the space cone, as shown in Fig. 4 .12. For any given starting values of o the constants Lo and Tare determined and from these...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 6 docx
... = -10 12 + mR'y2(? + of + o 2 which in the absence ofexternal forces is-constant. The constant may be equated to the initial conditions when o = oo. Thus 1 12 Dynamics ... integrating gives L' -12. dA - r0 =- 22 dt L' ba t = A = -(0 - esinca) 2 2 Using equations (5.37) and (5.38) Fig. 5.1 1 110 Dynamics of vehicles Fig. .....
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 8 docx
... under the action of a constant force X applied to the face at x = 0 as shown in Fig. 6 .12. If we assume that a wave travels into the bar with a speed c then we may use force = ... Equating the two expressions for E gives pvclE = v/c or c2 = Elp as before. Fig. 6 .12 148 Impact and one-dimensional wave propagation Fig. 6.21 Fig. 6.22 Maximum strain at ....
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 9 potx
... au KGA ( dx - 0) = -V2 2 (6 .122 ) (6 .123 ) (6 .124 ) (6 .125 ) It is now possible to eliminate 0 between equations (6 .120 ) and (6 .12 1). Equation (6 .120 ) can be written as 2 2 V.lf ... 1 0, - v.u - - 2 VJI KC, - Equation (6 .12 1) is written as and differentiating partially with respect to x gives (6 .126 ) (6 .127 ) or This is known as the...
Ngày tải lên: 10/08/2014, 20:20
Advanced Engineering Dynamics 2010 Part 11 pps
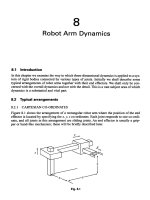
... shall only be con- cerned with the overall dynamics and not with the detail. This is a vast subject area of which dynamics is a substantial and vital part. 8.2 Typical arrangements 8.2.1 CARTESIAN ... SUCCESSIVE ROTATIONS ABOUT FIXED AXES 8 Robot Arm Dynamics 8.1 Introduction In this chapter we examine the way in which three-dimensional dynamics is applied to a sys-...
Ngày tải lên: 10/08/2014, 20:20