Advanced Engineering Dynamics 2010 Part 11 pps
Advanced Engineering Dynamics 2010 Part 11 pps
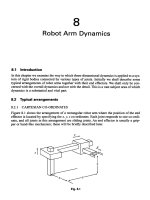
... shall only be con- cerned with the overall dynamics and not with the detail. This is a vast subject area of which dynamics is a substantial and vital part. 8.2 Typical arrangements 8.2.1 CARTESIAN ... SUCCESSIVE ROTATIONS ABOUT FIXED AXES 8 Robot Arm Dynamics 8.1 Introduction In this chapter we examine the way in which three-dimensional dynamics is applied to a sys-...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 14 ppsx
... reverse then a body at rest disintegrates into two particles having kinetic energy at the expense of the rest mass of the system. In conventional engineering situations this does not occur, but ... input at the joint in the direction of the vertical part of the 'T'. As a result an axial wave is generated in the vertical part and symmetri- cal bending waves are generated...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 1 pdf
... Advanced Engineering Dynamics H. R. Harrison Formerly Department of Mechanical Engineering & Aeronautics City University London T. Nettleton Formerly Department of Mechanical Engineering ... dynamics or hydrodynamics or aerodynamics and is not covered in this book. The object of this book is to form a bridge between elementary dynamics and advanced special...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 2 doc
... a group of particles 15 1.13 Newton's laws for a group of particles Consider a group of n particles, three of which are shown in Fig. 1.1 1, where the ith parti- cle has ... on the particle is the vector sum of the forces due to each other particle in the group and the resultant of the external forces. If & is the force on particle i due to particle ......
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 3 ppt
... then the time integral will be integrated by Parts because 6u = 0 at t, and t2. The second term in equation (3.18) is Integrating by parts gives (3.19) 50 Hamilton S principle ... integrating by parts, h 6x 1; - It:mi 6x dt - kx 6x dt = 0 4 (3.10) Rotating fiame of reference and velocity-dependent potentials 37 It is interesting to note that for a charged par...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 4 pot
... 4.5 r~ = rA + PI where p, is the position vector of particle i relative to A. For a rigid body equation (4.7) gives (4 .11) r; = VA + 0, x p, Substituting equations (4.10) ... [TI' (0) (4.44) (4.45) Also from Appendix 1 [r]" [TIX = (r) (ry - r2 [ 11 and therefore equation (4.45) is (4.46) 2 The term in the large parentheses is recognized .....
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 5 pdf
... air or in space. The pur- pose of the chapter is to bring out some of the characteristic dynamics in the particular domain. Satellite motion is typified by the motion of a small body about a large ... fact that torques do not just produce angular accelerations in a straightforward analogy with particle dynamics seems to require reconciliation. A simple example will serve to illustra...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 6 docx
... ba t = A = -(0 - esinca) 2 2 Using equations (5.37) and (5.38) Fig. 5.1 1 110 Dynamics of vehicles Fig. 5.18 Y = m(; + rU - pw) Z = m(w + pV - qu) The moment ... conditions when o = oo. Thus 1 12 Dynamics of vehicles (5.96) 1 2 where C, is the drag coeficient. The drag coefficient is the sum of two parts, the first being the sum...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 8 docx
... - - a. = e-' [ J e' (1 - 0) dI + constant] - = e-' [e' - 11 = (1 - e-') (the constant = 1 as Go = 0 when i = 0) - - - - a, = e-' ... f"= gA-1 (6.29) At x = 0 there must be continuity of velocity. For the short bar the particle velocity is super- imposed on the pre-impact speed of J! Thus (6.30) V +...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 9 potx
... (6.109) Integrating the first term once more by parts and noting that the end forces are workless leads to and finally since 0 = avBx (6 .110 ) Because 6v is arbitrary (except at t, and ... Therefore 1 0, - v.u - - 2 VJI KC, - Equation (6.12 1) is written as and differentiating partially with respect to x gives (6.126) (6.127) or This is known as the Emosh...
Ngày tải lên: 10/08/2014, 20:20