Advanced Engineering Dynamics 2010 Part 9 potx

Advanced Engineering Dynamics 2010 Part 9 potx
... is of the order unity equation (6. 190 ) is, to a close approximation, W’ = (Kla)’ (6. 191 ) w2 = K2q 1 + qa2 Returning to the dimensional form k (6. 192 ) c2 rc2 ~=-k=- a R,2 from ... written as and differentiating partially with respect to x gives (6.126) (6.127) or This is known as the Emoshenko beam equation. Waves in a helical spring 1 69 Fig. 6.40 F...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 1 pdf
... Arm Dynamics 8.1 Introduction 8.2 Typical arrangements 8.3 Kinematics of robot arms 8.4 Kinetics of a robot arm 9 Relativity 9. 1 9. 2 9. 3 9. 4 9. 5 9. 6 9. 7 9. 8 9. 9 9. 10 9. 1 1 9. 12 ... 176 177 178 1 79 184 186 1 89 192 194 194 194 197 223 235 235 235 240 24 1 242 246 2 49 250 252 254 256 258 261 272 281 288 Bibliography...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 2 doc
... a group of particles 15 1.13 Newton's laws for a group of particles Consider a group of n particles, three of which are shown in Fig. 1.1 1, where the ith parti- cle has ... on the particle is the vector sum of the forces due to each other particle in the group and the resultant of the external forces. If & is the force on particle i due to particle ......
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 3 ppt
... the time integral will be integrated by Parts because 6u = 0 at t, and t2. The second term in equation (3.18) is Integrating by parts gives (3. 19) 50 Hamilton S principle Thus the ... choice of reference axes m(ap)i 2 at (Y2 at *) E= m0+U -V (2.39b) mo2 2 at ( 1 Fig. 2.6 Moving co-ordinates 39 from which we see that there are fictitious Coriolis force...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 4 pot
... which discusses robot dynamics. The fact is easily demonstrated by reference to Fig. 4.3, depicting three consecutive 90 " rotations. The line OP is rotated 90 ' about the x ... momentum about some origin 0 is L, = C r, x m,i; (4 .9) (4.10) From Fig. 4.5 r~ = rA + PI where p, is the position vector of particle i relative to A. For a rigid body equat...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 5 pdf
... constant 1 1 1 2 2 2 E = - ZIe2 + - Z,b2sin2B + - Z3 (91 cos 8 + \irf + rngh cos 8 (4.88) Fig. 4.18 92 Dynamics of vehicles and therefore dr du - = L dt de and ... from P. ne symmetn'cal body 79 Therefore Z,e = (-Z3azb + Z,S2 cos 8 + mgh ) sin 8 = 0 -13azb + llb2 cos8 + mgh = 0 (4 .93 ) (4 .94 ) For 6 = 0 and 8 no...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 6 docx
... I: L*’ - - K (5. 39) 2Pr and when the radial component of the velocity is zero (i = 0) equation (5. 39) becomes the quadratic 96 Dynamics of vehicles 2E .9 + 2Kr - L*2 = 0 ... W+O (5 .92 ) z = m(6 - qv = m(6 - itu (5 .93 ) M = Bq = r,e (5 .94 ) where q = 6 and B =I,,. Consider first the aircraft in straight and level flight. Figure 5. 19...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 8 docx
... frequencies are very close together then, in the limit, (6 .92 ) 00 phase velocity cp = - k0 and do dk groupvelocity cg = - (6 .93 ) A graph of o versus k is called the dispersion ... cs - or 0, = c,(k, - 43) + wo (6 .94 ) Now a typical wave in this region is u = U, COS (o,t - k,x) Substituting from equation (6 .94 ) gives u = U, COS { [cg (...
Ngày tải lên: 10/08/2014, 20:20
Advanced Engineering Dynamics 2010 Part 11 pps
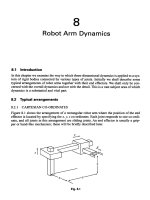
... shall only be con- cerned with the overall dynamics and not with the detail. This is a vast subject area of which dynamics is a substantial and vital part. 8.2 Typical arrangements 8.2.1 CARTESIAN ... SUCCESSIVE ROTATIONS ABOUT FIXED AXES 8 Robot Arm Dynamics 8.1 Introduction In this chapter we examine the way in which three-dimensional dynamics is applied to a sys-...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 12 pdf
... d 1 90 ' -90 ' 0 D, =O 2 60 ' 90 " 0 0 3 0 0 0 0.8 With reference to the data sheet the three A matrices are ce, o sel o &41,=[; ;l 9& apos; ... ann dynamics (4 Fig. 8.25 (a) and (b) Now a is the rotation of one z axis relative to the previous z axis so aI = -90 " and a, = The table is as follows: 90 &quo...
Ngày tải lên: 10/08/2014, 20:20