Advanced Engineering Dynamics 2010 Part 6 docx

Advanced Engineering Dynamics 2010 Part 6 docx
... cos(8)k) = cosysine (5 .61 ) Substituting equation (5 .6 1) into equation (5 .60 ) gives (~s~~~Bcos’~ - 1)(13 - z,) p= +- (5 .62 ) The first term of equation (5 .62 ) is the potential due ... Crk (5.84) (5.85) (5. 86) 100 Dynamics of vehicles c = -1 1" dr = (d2 + r3 /6) - 1" YK 241 + r2) JK - - -[ JK 1" 7 1 tan (6/ 2) + 5tan3(e/2...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 8 docx
... Fig. 6. 17 or k X - g: =gan (6. 60) and k EA F:, = - a, (6. 61) Adding equations (6. 59), (6. 60) and (6. 61) gives V ci, 2k - + 2f, = - + - an c c EA (6. 62) From ... 2kc t=t - EA Thereby equation (6. 64) can be written as n-l _- (6. 65) (6. 66) (6. 67) 0 As C has to be continuous tin (0) = tin-1 @I (6. 68) The parameter p...
Ngày tải lên: 10/08/2014, 20:20
Advanced Engineering Dynamics 2010 Part 13 docx
... so substituting this into equation (9 .65 ) gives l+p IR 1-P = d( ) (9 .64 ) (9 .65 ) (9 .66 ) (9 .65 ) (9 .67 ) This wave is travelling to the right so it will only be received by an observer ... is the usual velocity three-vector. Thus there is a scalar part P, = Crn,y,c and a vector part (PI = Cm,y,(u), (9.95) (9. 96) (9.97) (9.98) (9.99) (9.100) (9.101...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 1 pdf
... Stability of aircraft Stability of a road vehicle 6 Impact and One-Dimensional Wave Propagation 6. 1 6. 2 6. 3 6. 4 6. 5 6. 6 6. 7 6. 8 6. 9 6. 10 6. 1 1 Introduction The one-dimensional wave ... Dispersive waves 55 55 55 58 59 61 64 65 67 72 75 76 80 83 85 85 85 88 90 93 100 103 1 06 107 107 109 1 I8 125 125 125 128 130 132 133 1 36...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 2 doc
... rnii;,)-6ri = 6V i av av ax aY [(F, - M)i + (F,, - my)j].(Sxi + Syj) = 6V= - 6x + - 6y (F, - m.f) 6x + (F, - my) Sy = mgSy (1 .61 ) Because 6x and 6y are ... zFi.dr = 0 = 6W I (Fi. nm-con + F,, ,,) . 6r, = 0 or (Fi. non-con) . 6 1 = 6 That is, (1.59) the virtual work done by the non-conservative forces = 6V 1.17 D‘Alembett’...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 3 ppt
... andthenputtingE=O. From Fig. 3.4 we see that 6 (x + dx) = 6x + d(6x) Therefore 6 (dr) = d(6x) and dividing by dt gives dxd dt dt 6- = - (6x) mi2 kx2 (3 -7) For the problem at ... integrating by parts, h 6x 1; - It:mi 6x dt - kx 6x dt = 0 4 (3.10) Rotating fiame of reference and velocity-dependent potentials 37 It is interesting to note that for...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 4 pot
... (4 .62 ) (4 .63 ) Without loss of generality we can choose the sense of the z axis such that oz is positive, in which case a, j3 and y are all acute angles. Expanding equation (4 .62 ) ... , (z;o,; + I:o6 + Ijoi) 40: \ (Zio.; + 1jo.t + 1: 0;) cos p = Expanding equation (4 .63 ) and multiplying the numerator and denominator by I3 cosy = (4 .65 ) Now if...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 5 pdf
... CLj: (5. 16) Now 2 2 L, = mlrl o + m2r2m 76 Rigid body motion in three dimensions Thus K = cos (0) k + sin (e) cos (v)j + sin (e) sin (w) i Writing (4. 76) o = ... (ii) From Figs 4. 26 and 4.27 we see that the change in the moment of momentum vector is Z30z sin 8 d0 i - Z,b sin 8 cos 8 d0 i = dL, Fig. 4.27 86 Dynamics of...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 9 potx
... dividing by ds, (6. 168 ) (6. 169 ) (6. 170) Substituting the six equations of state ( (6. 155) to (6. 160 )) into the equations of motion ( (6. 162 -6. 164 ) and (6. 168 -6. 170)) will yield ... frequency (6. 182) (6. 183) (6. 184) 1 66 Impact and one-dimensional wave propagation Fig. 63 8 or U,l (PI = PAD2@) (6. 161 ) The component equations are PP, -...
Ngày tải lên: 10/08/2014, 20:20
Advanced Engineering Dynamics 2010 Part 11 pps
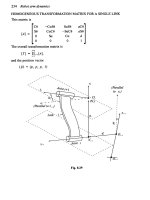
... i6 ] The overall transformation matrix for the end effector is ces o se, o c 86 -so6 0 0 3[ 46 = 3[AI4 dAIS S[A 16 The components of &4 16 are A,, = cos e, cos Os cos 66 ... A,, = cos e, cos Os cos 66 + sin 0, sin 06 A,* = -cos 8, cos OS sin e6 + sin 8, cos 66 AI3 = cos 8, sin 06 Kinematics of a robot arm 203 Refemng aga...
Ngày tải lên: 10/08/2014, 20:20
- tài liệu hướng dẫn sử dụng word 2010 part 22 docx
- thiết kế bài giảng lịch sử 8 tập 1 part 6 docx
- giáo trình thực tập sinh hóa part 6 docx
- ielts listening skill part 6
- 50 harvard essays part 6
- toefl cbt book part 6
- writing template part 6
- reading upper intermediate part 6
- teaching academic esl writing part 6