Advanced Engineering Dynamics 2010 Part 5 pdf

Advanced Engineering Dynamics 2010 Part 5 pdf
... Therefore (5. 5) Gm sin0 d0 dV = - 2r Using the cosine rule - 2Rx cos0 (5. 6) y = x2 + R~ and differentiating gives (5. 7) 2 2r dr = 2Rx sin0 d0 Substituting equation (5. 7) into ... m2(r2& + 2wi2) or (5. 15) o = 1 ~(m,r~w) = z 1 g(m2r:w) rl Substituting equation (5. 12) into equation (5. 14) gives lF121 = p2s + CLj: (5. 16) Now...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 1 pdf
... Dispersive waves 55 55 55 58 59 61 64 65 67 72 75 76 80 83 85 85 85 88 90 93 100 103 106 107 107 109 1 I8 1 25 1 25 1 25 128 130 132 133 136 138 141 1 45 149 2 Newtonian ... The symmetrical body Forced precession Epilogue 5 Dynamics of Vehicles 5. 1 5. 2 5. 3 5. 4 5. 5 5. 6 5. 7 5. 8 5. 9 5. 10 5. 1 1 5. 12 Introd...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 12 pdf
... 0 .5 -0 .50 0 0 -0.866 -0.779 0 0 0 0 I 222 Robot arm dynamics and The velocity of 0 is dr, dri-l dt dt + - (d, + a;) + 0, x (dj + ai) at Vi=-=- (8 .51 ) (8 .52 ) ... revolute joint the second term on the right hand side is zero. The acceleration of 0; is (8 .54 ) (8 .55 ) For a revolute joint the second and fourth terms on the right hand side are ze...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 2 doc
... Thus equation (1 .53 ) can be written Newton 's laws for a group of particles 15 1.13 Newton's laws for a group of particles Consider a group of n particles, three ... zero the moment of momentum is conserved. 1. 15 Energy for a group of particles Integrating equation (1. 45) with respect to displacement yields (1 .55 ) The first term on the left hand...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 3 ppt
... general form for the Lagrangian of a particle is map aP m e 2 at at 2 at r= +- (5) ~p). (5) ~p>+m ((R~p) - v =T - u, - u, - v with 5) = oxi + o,,j + o,k and p = ... time integral will be integrated by Parts because 6u = 0 at t, and t2. The second term in equation (3.18) is Integrating by parts gives (3.19) 50 Hamilton S principle Thus the .....
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 4 pot
... constant (4 .55 ) Since for a rigid body there can be no internal energy losses and because there is no exter- nal work being done the kinetic energy will be constant 1 1 2 2 (4 .56 ) We can ... (4.47) gives (4 .50 ) (4 .5 1) where Z is the moment of inertia about the axis of rotation. With (e) = (1 m n)T and noting that [I] is symmetrical, equation (4 .50 ) expan...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 6 docx
... (5. 50) shows that Equation (5. 47) may now be written as (5. 49) (5. 50) (5. 5 1) (5. 52) which holds for 0 S e < 1. Figure 5. 12 shows plots of 0 versus a non-dimensional time for ... J(e + 1) - {(e - l)tan(6/2) Plots of equation (5. 55) , including equation (5. 54), for different values of e are shown in Fig. 5. 13. 5. 6 Effects of oblateness I...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 8 docx
... u’) Also shown on Fig. 6. 15 is a plot of - X/X- = (1 - e-‘) (6 .55 ) and this shows a reasonably close resemblance to the plot of (6 .54 ). Equation (6 .55 ) is of the same form as ... eventually to (6.49) (6 .50 ) 21 213 +p+1 2p + 1 I= (!) 3v h [iln(71 - ) - ,3 arctan( T) +'$](6 .51 ) Now Impact of a rigid mass on an elastic bar 1 45 &...
Ngày tải lên: 10/08/2014, 20:20

Advanced Engineering Dynamics 2010 Part 9 potx
... one-dimensional wave propagation HELICAL SPRING DATA Nmber of turm 11 .5 Coilradius R 50 .0 mm Wmradius r 12 .5 mm Mlterial, steel EN 498 Galcdatedjvm jidl theory Helix angle s" ... spring 167 will separate into two groups of three. So, substituting equations (6. 157 ), (6. 158 ) and (6. 159 ) into equations (6.164), (6.168) and (6.169) leads to m R GJ(...
Ngày tải lên: 10/08/2014, 20:20
Advanced Engineering Dynamics 2010 Part 11 pps
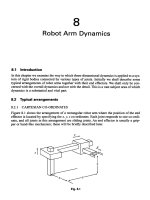
... shall only be con- cerned with the overall dynamics and not with the detail. This is a vast subject area of which dynamics is a substantial and vital part. 8.2 Typical arrangements 8.2.1 CARTESIAN ... SUCCESSIVE ROTATIONS ABOUT FIXED AXES 8 Robot Arm Dynamics 8.1 Introduction In this chapter we examine the way in which three-dimensional dynamics is applied to a sys-...
Ngày tải lên: 10/08/2014, 20:20